





Excavatrice à chouleur Liebherr R 9800 #42100

- Référence : #42100
- Nom du modèle : Excavatrice à chouleur Liebherr R 9800
- Nombre de pièces : 4108
- Année : 2019
- Dimensions : 59 x 31 x 31
- Designer : Markus Kossmann
- Niveau de difficulté : 3/5
- Note du modèle principal : 5/5
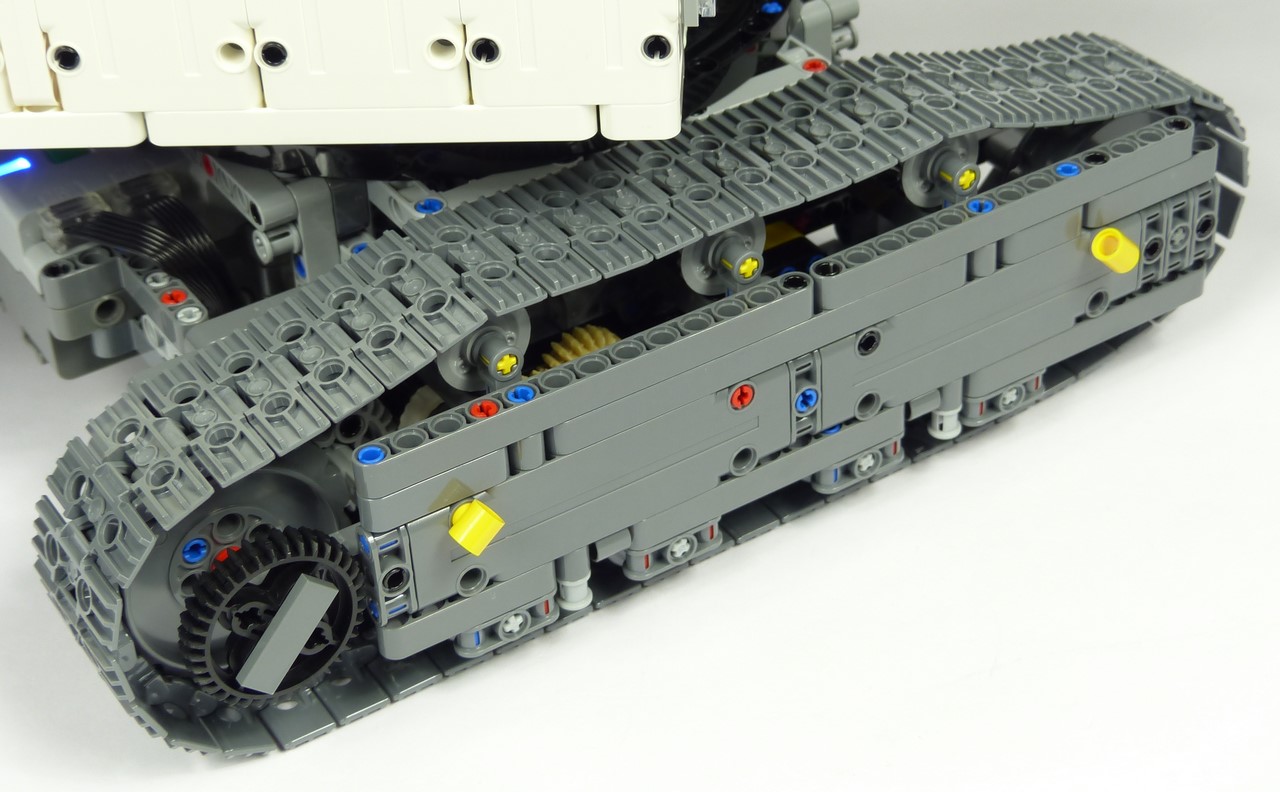
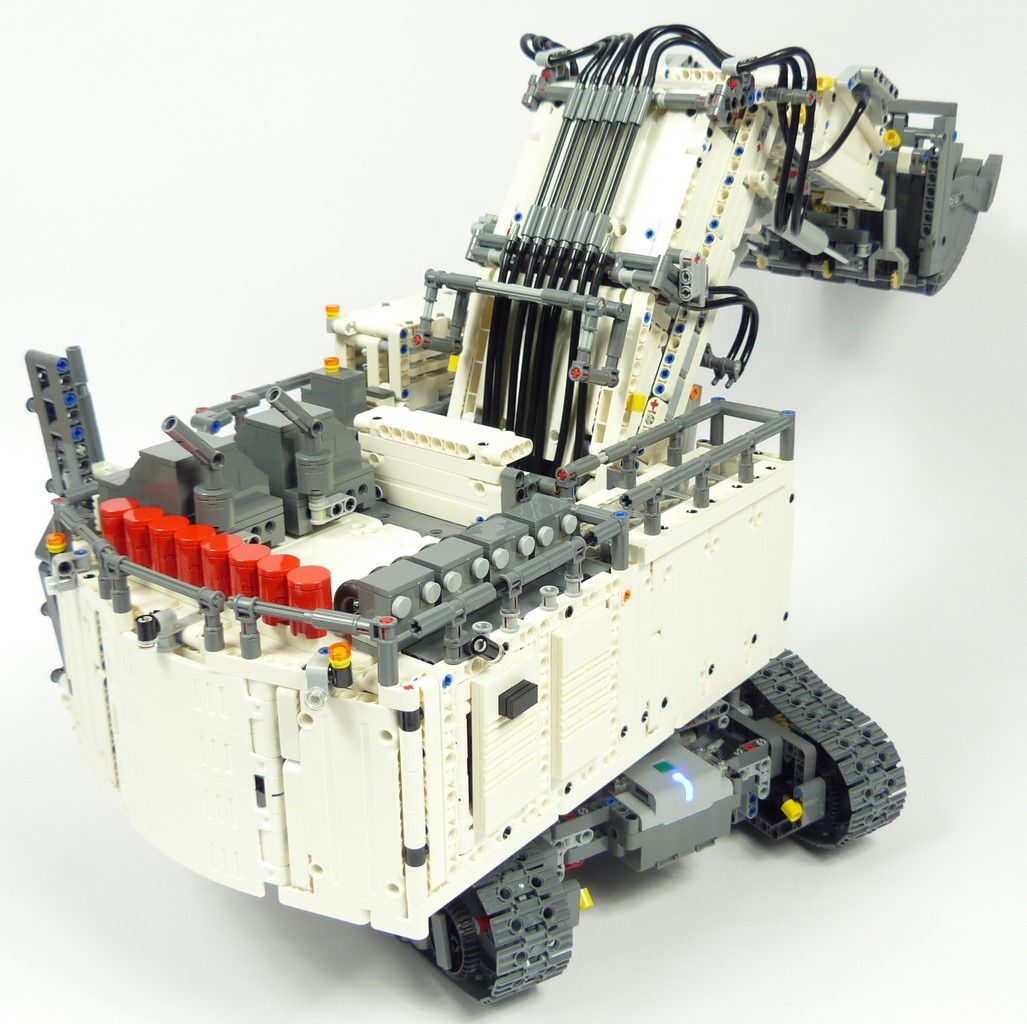
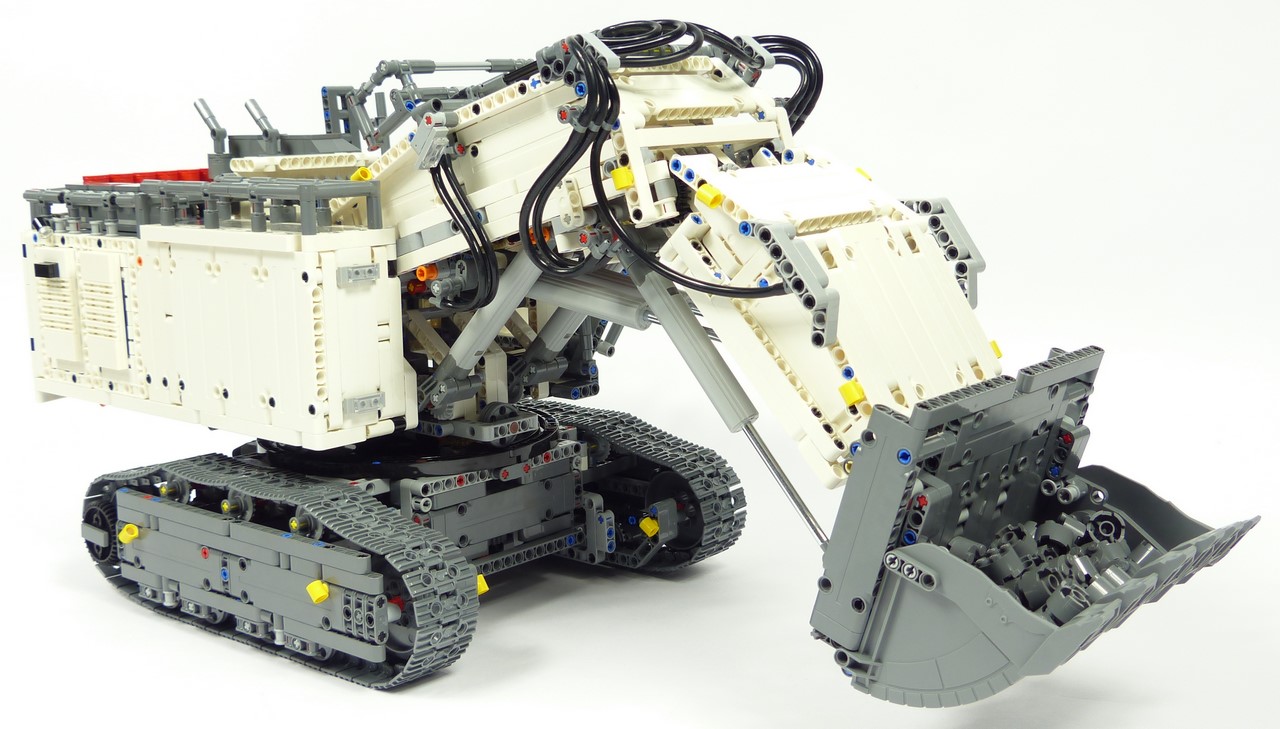
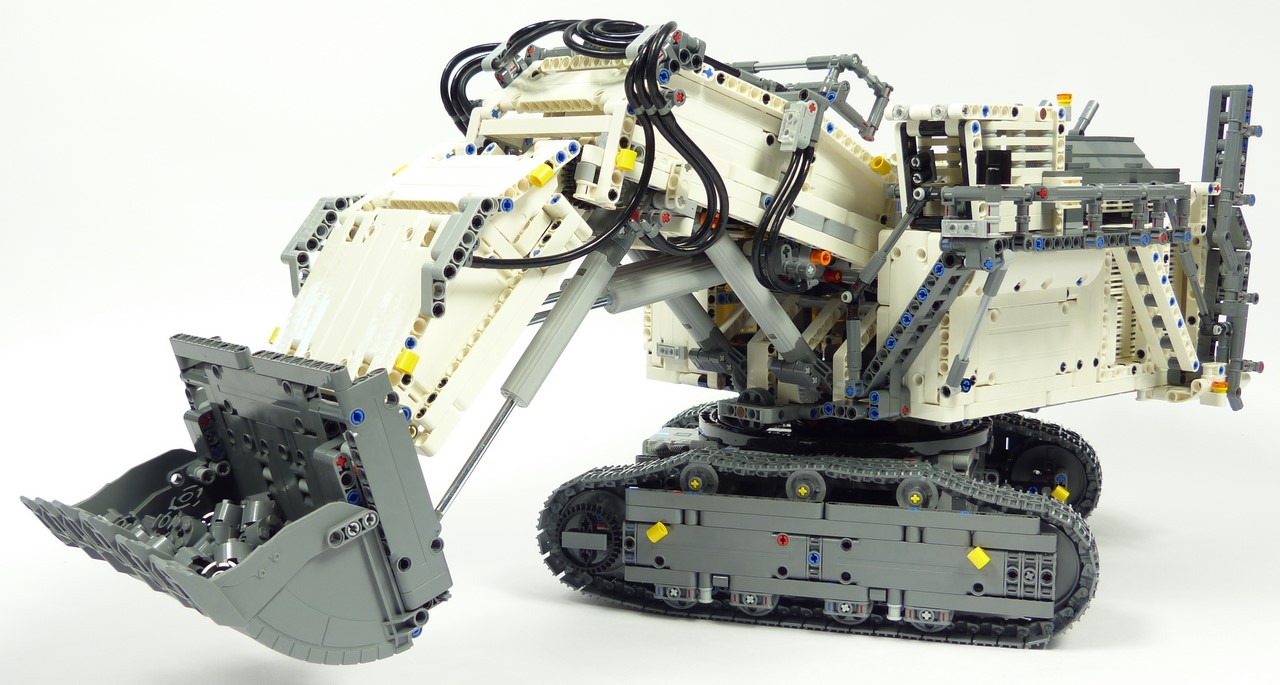
Avant toute chose, il convient d'insister sur la taille titanesque de cette excavatrice Liebherr #42100. Avec plus de 4000 pièces et une construction relativement peu concentrée, le set est vraiment énorme. Sur le châssis, les chenilles dessinent une forme strictement identique à ce que propose la vraie excavatrice. Les finitions sont bonnes également puisque chaque train dispose d'un habillage gris foncé avec un barbotin bien en vue à l'arrière, 3 galets de roulement et les points d'arrimages nécessaires lors des opérations d'assemblage et de désassemblage de l'engin pour son transport. Entre les 2 trains de chenilles, le châssis a été soigné à l'avant. A l'arrière cela est un peu moins vrai puisqu'il y a le hub Powered Up. Son intégration demeure toutefois acceptable.

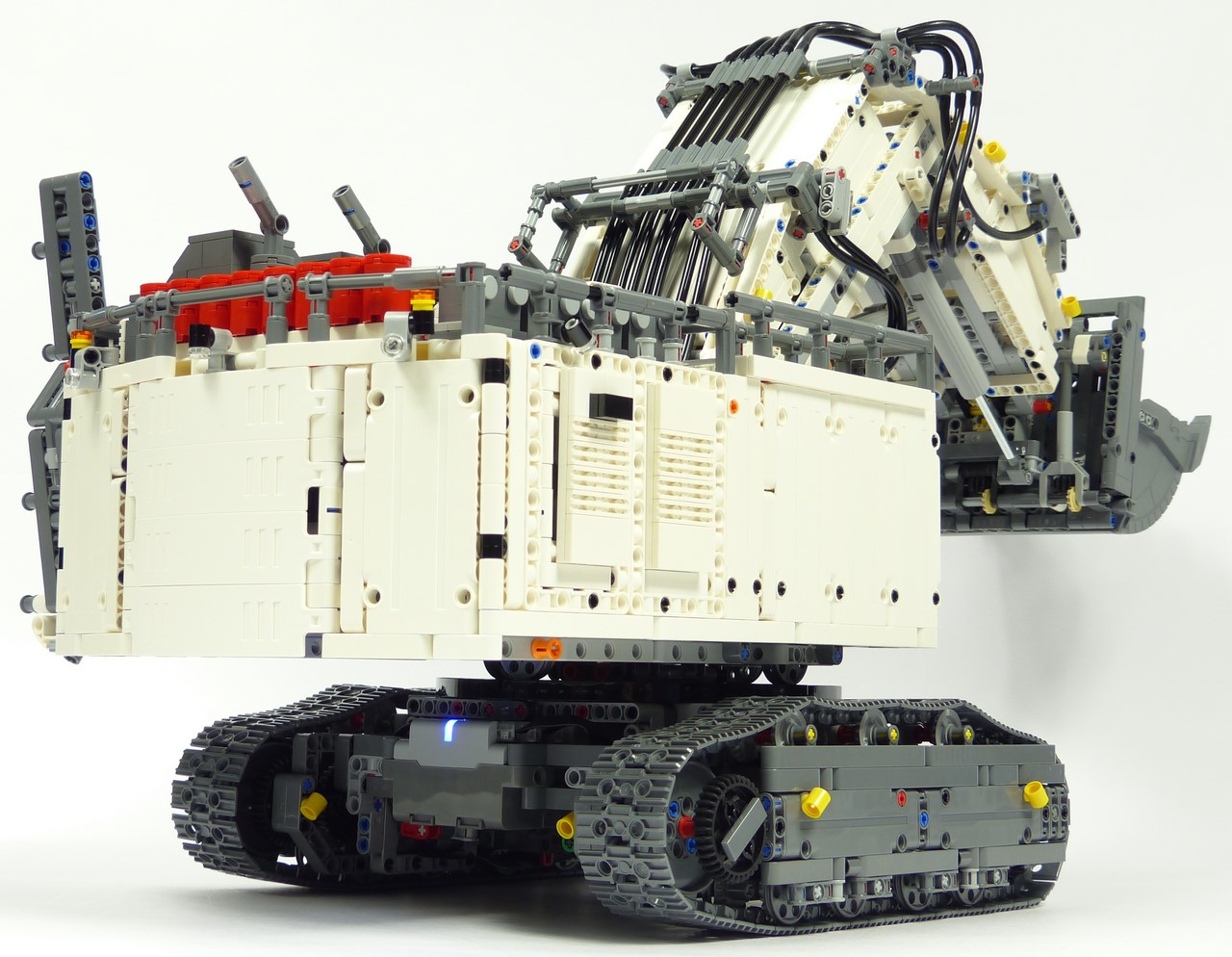


Le flanc gauche de la tourelle est détaillé à souhait, d'abord avec l'escalier d'accès pourvu d'une rampe de sécurité. A mi hauteur, un palier donne sur un renfoncement qui, sur l'excavatrice réelle, permet d'accéder à l'intérieur de la tourelle. Au sommet, la cabine du conducteur est très fidèle : des volets de protection côtés gauche et droit, un gyrophare, 2 feux sur le toit, 2 blocs climatiseurs, un parebrise en surplomb, un siège avec 2 manettes, 2 pédales et une planche de bord. Derrière la cabine, on a même l'armoire électrique ; difficile d'en demander davantage... Devant la cabine, on a bien l'escalier qui permet de descendre (ou monter) par l'avant. Par contre, Lego n'est pas allé jusqu'au bout puisqu'aucune échelle n'a été intégrée sur le châssis pour faire la liaison entre le bas de la tourelle et le sol. Tant pis.


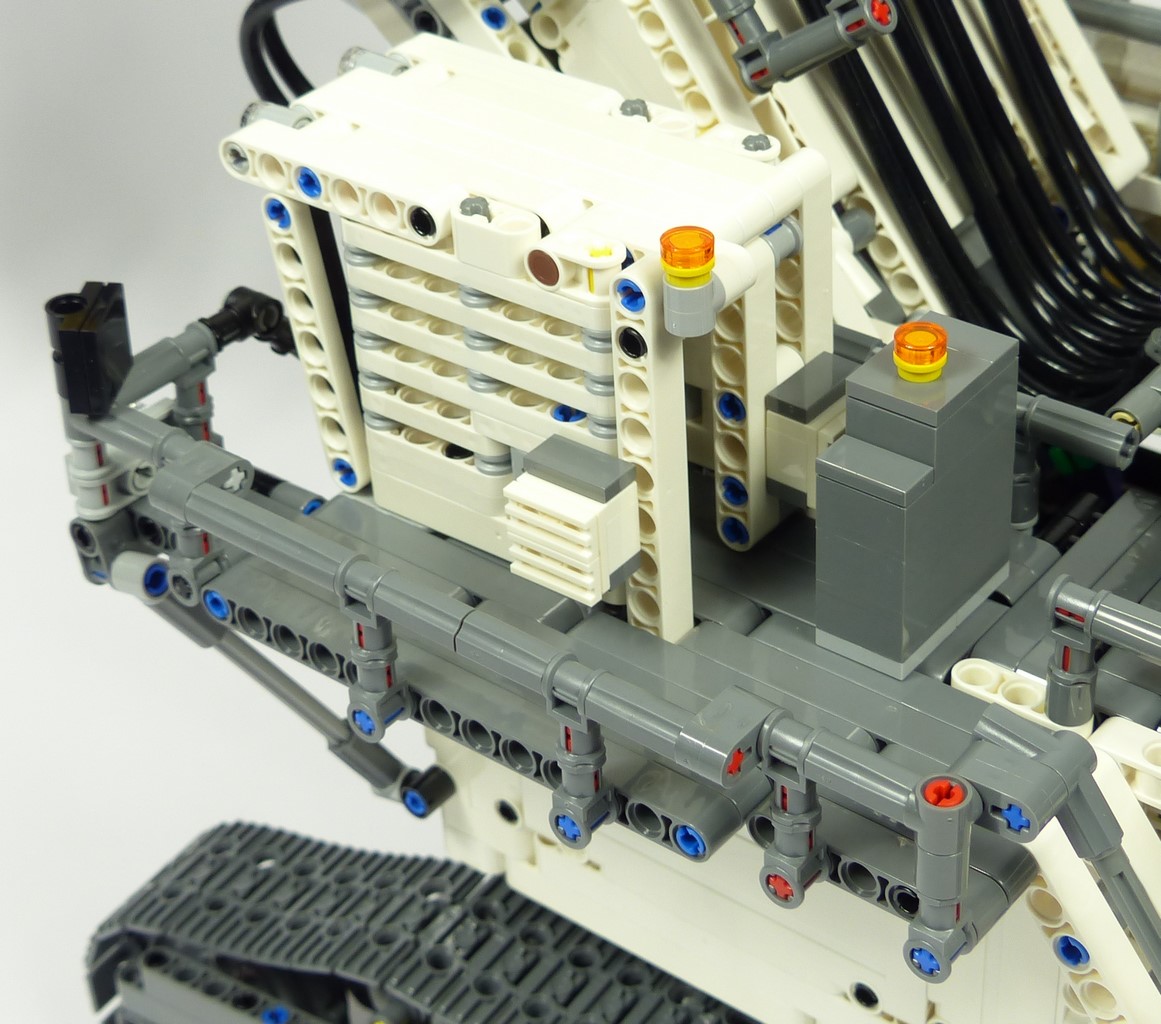

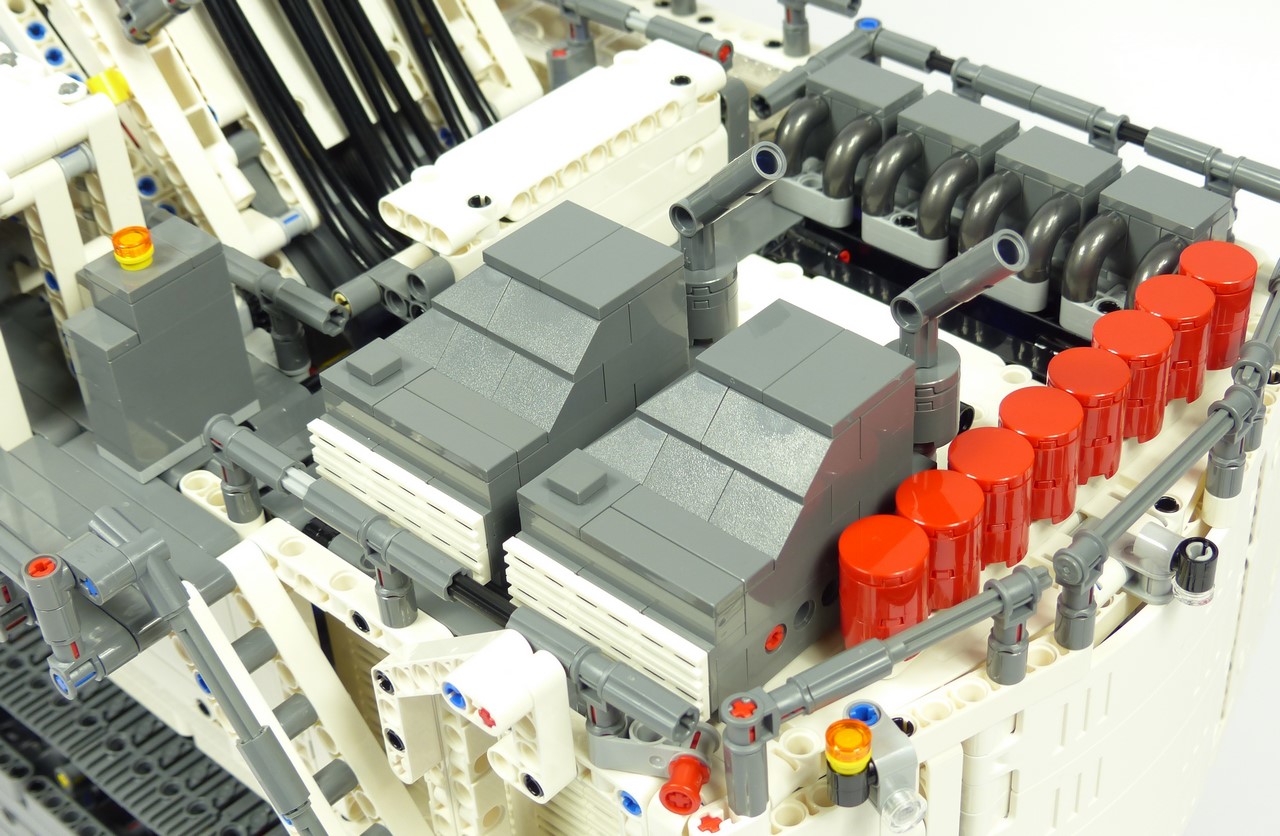
Sur le dessus, cette #42100 reproduit tous les détails de la vraie Liebherr. On a ainsi 2 gros blocs studful avec les échappements moteurs et 8 extincteurs rouges. Plus à droite, ce sont 4 filtres à air qui prennent place. Et bien sûr, tout ce petit monde est sécurisé avec des rambardes. Si en règle générale les formes bombées sont assez difficiles à traiter en Lego, la face arrière de notre excavatrice a été particulièrement bien gérée, notamment avec l'utilisation de ce carénage. On trouve également des feux de gabarit et 2 gyrophares sur cette face. C'est superbe !


Avec quelques feux, le côté droit de l'engin est nettement moins chargé que le côté gauche. Mais il recèle un autre atout. En ouvrant 2 capots moteurs, on révèle le système hydraulique (factice) de la bête. Toujours côté droit, plus en hauteur, on a les 4 échangeurs du système de refroidissement hydraulique. Avec ces hélices, ils sont joliment faits. Mais on déplorera l'utilisation des panels 1x4x3 en trans-clear : cela donne l'impression d'avoir un sol vitré et non un caillebotis.

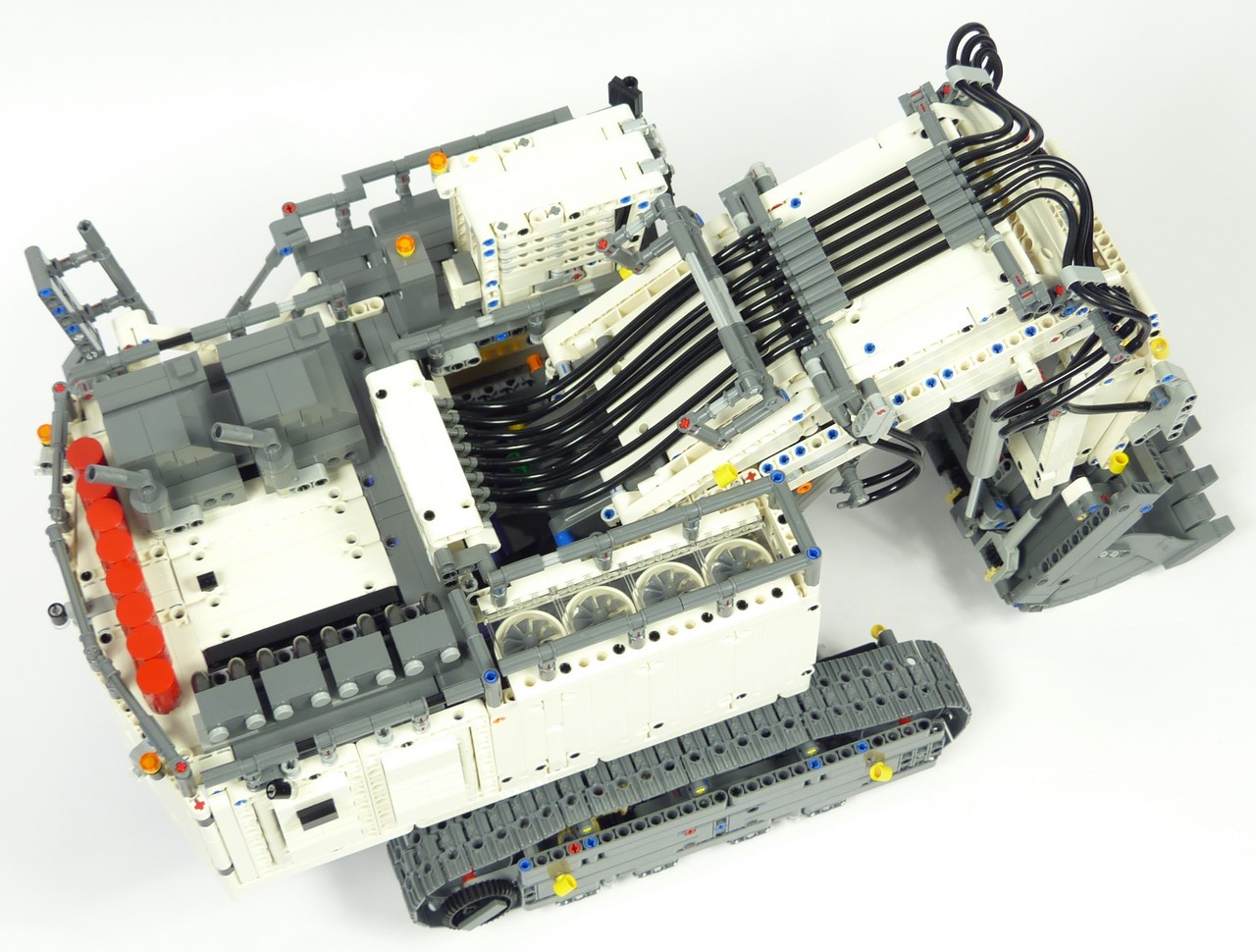


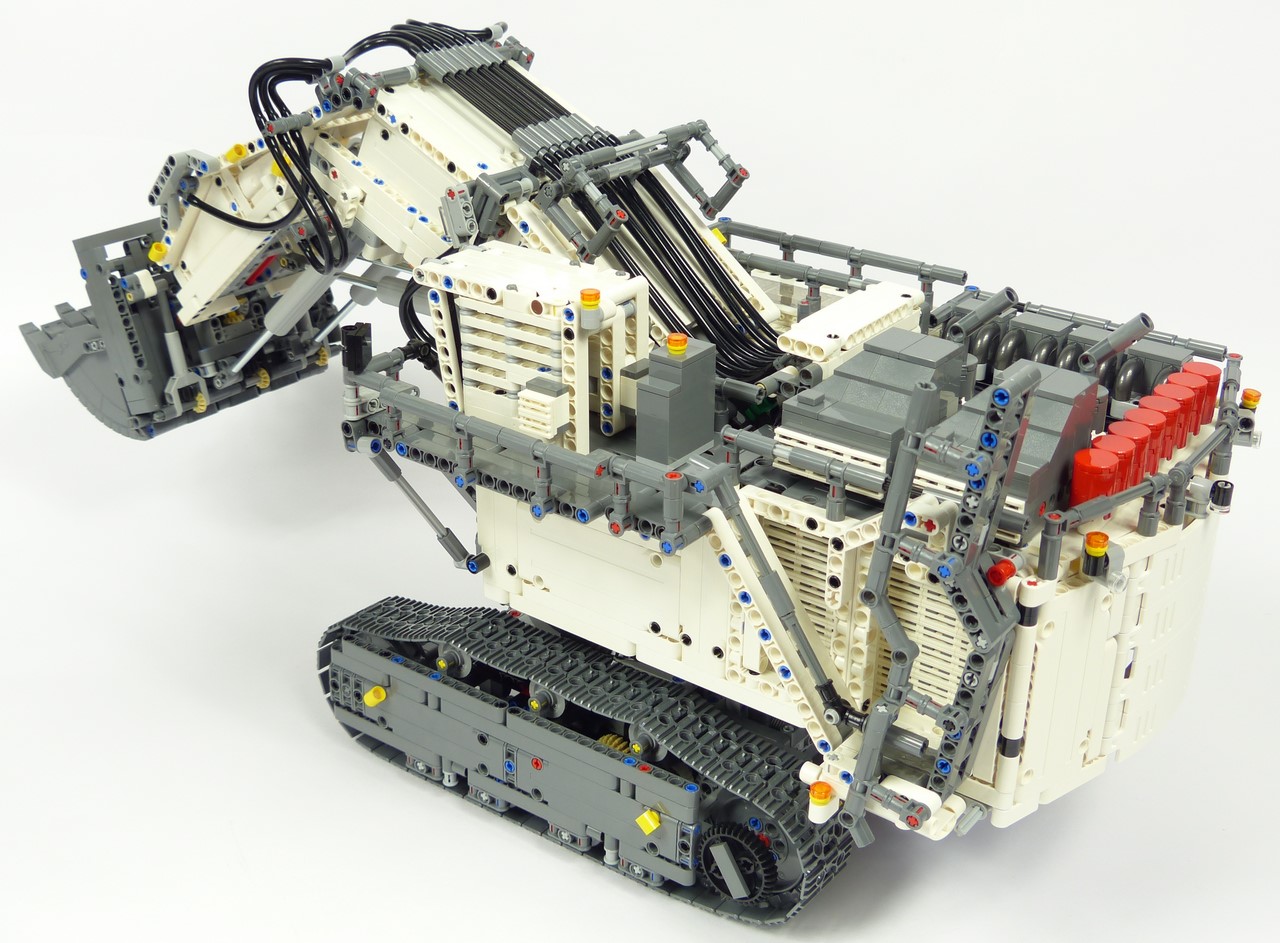
La première section du bras est massive. Dessus et sur les côtés, le carénage est très bon. Lego a même reproduit les arêtes saillantes avec des pièces studless qui débordent d'un tenon. Sous le bras, et parce que c'est aussi un peu ça qui fait le charme des Lego Technic, la mécanique du set est largement visible sans pour autant nuire au design général. En terme de détails, on a des feux de chaque côté et une barrière de sécurité sur le dessus. Mais alors que le set n'embarque pas de technologie pneumatique, ce sont bien les tuyaux pneumatiques factices qui remportent tous les suffrages. Les courbes fines et délicates qu'ils dessinent insufflent à notre excavatrice une fluidité et un réalisme confondant.


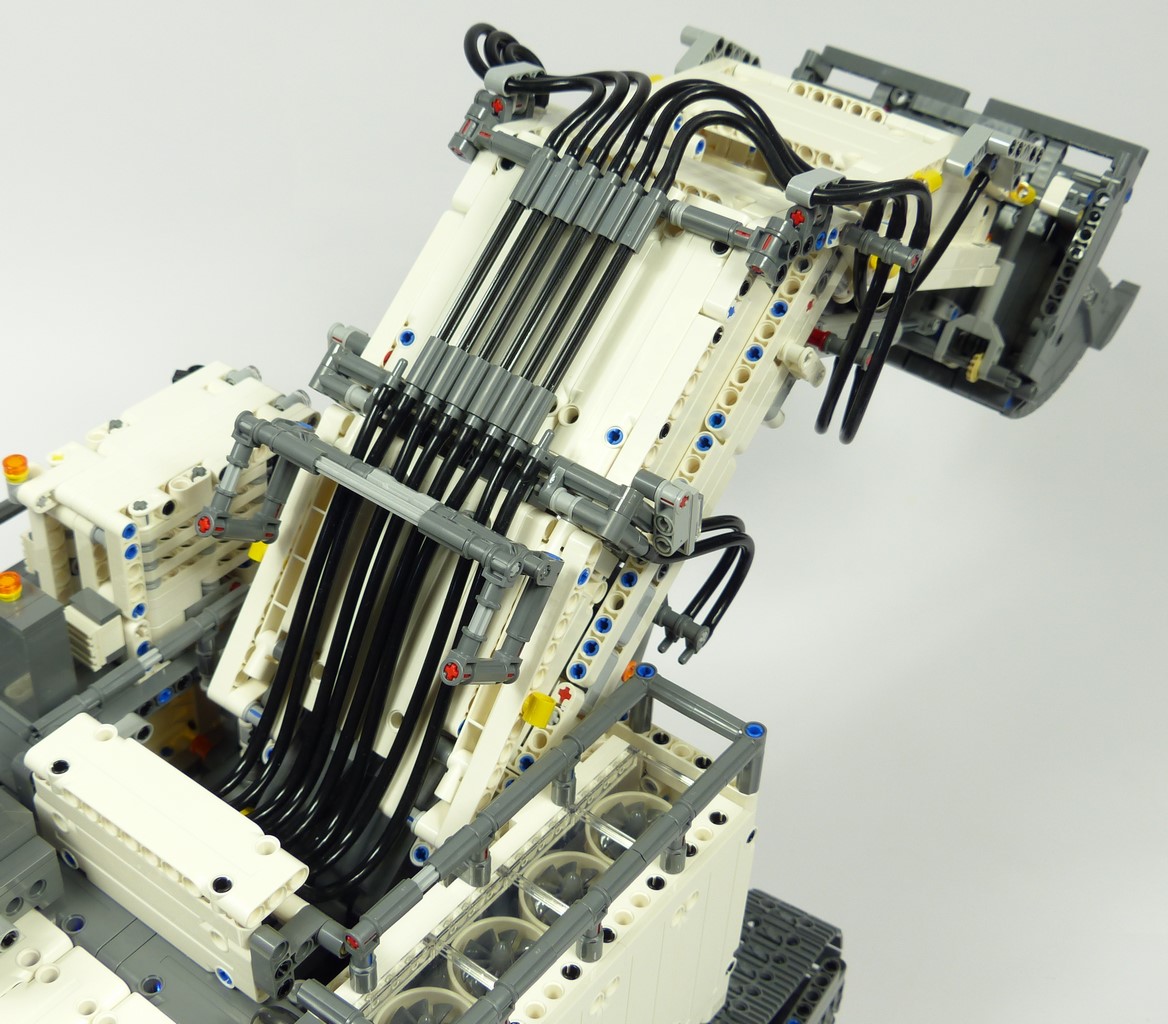
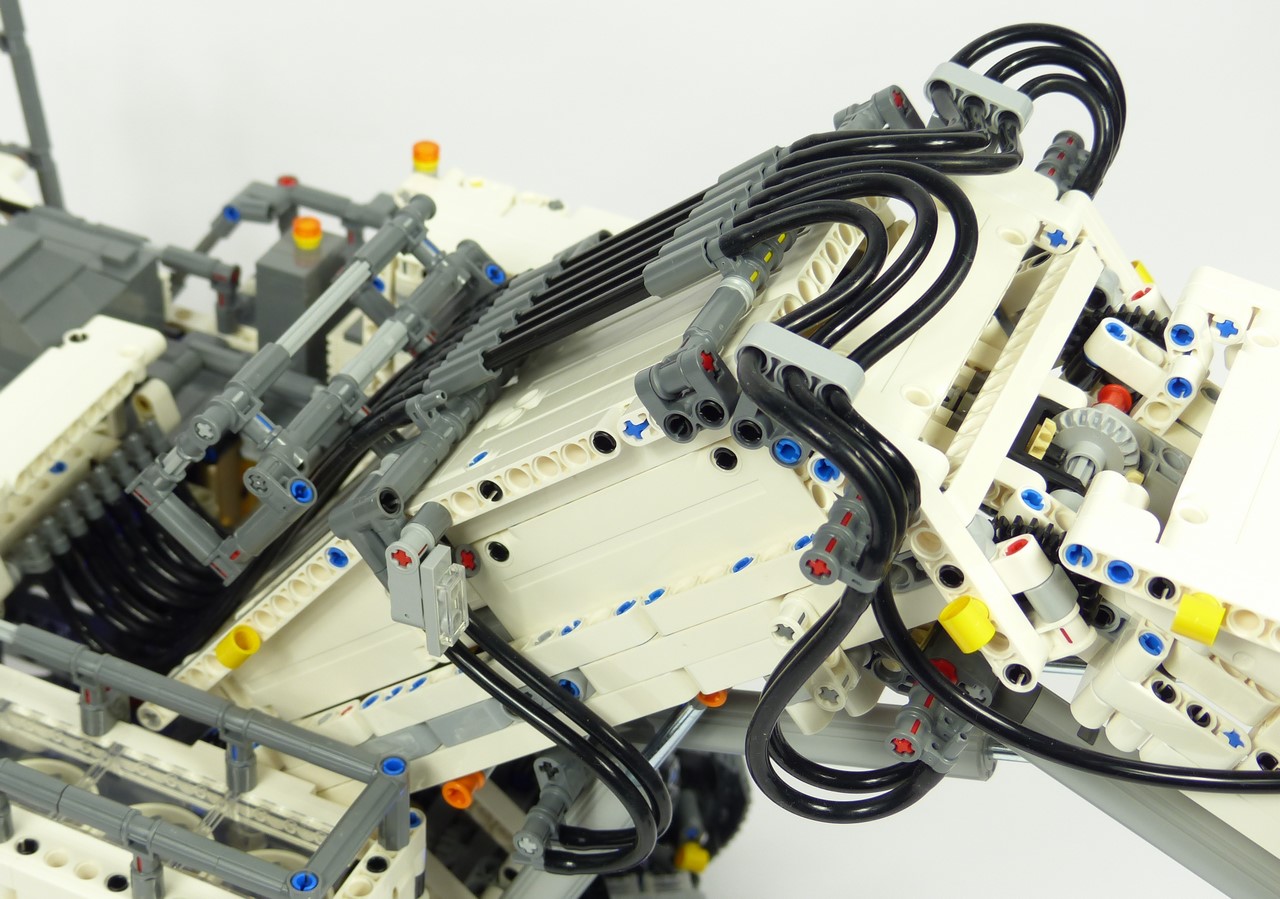
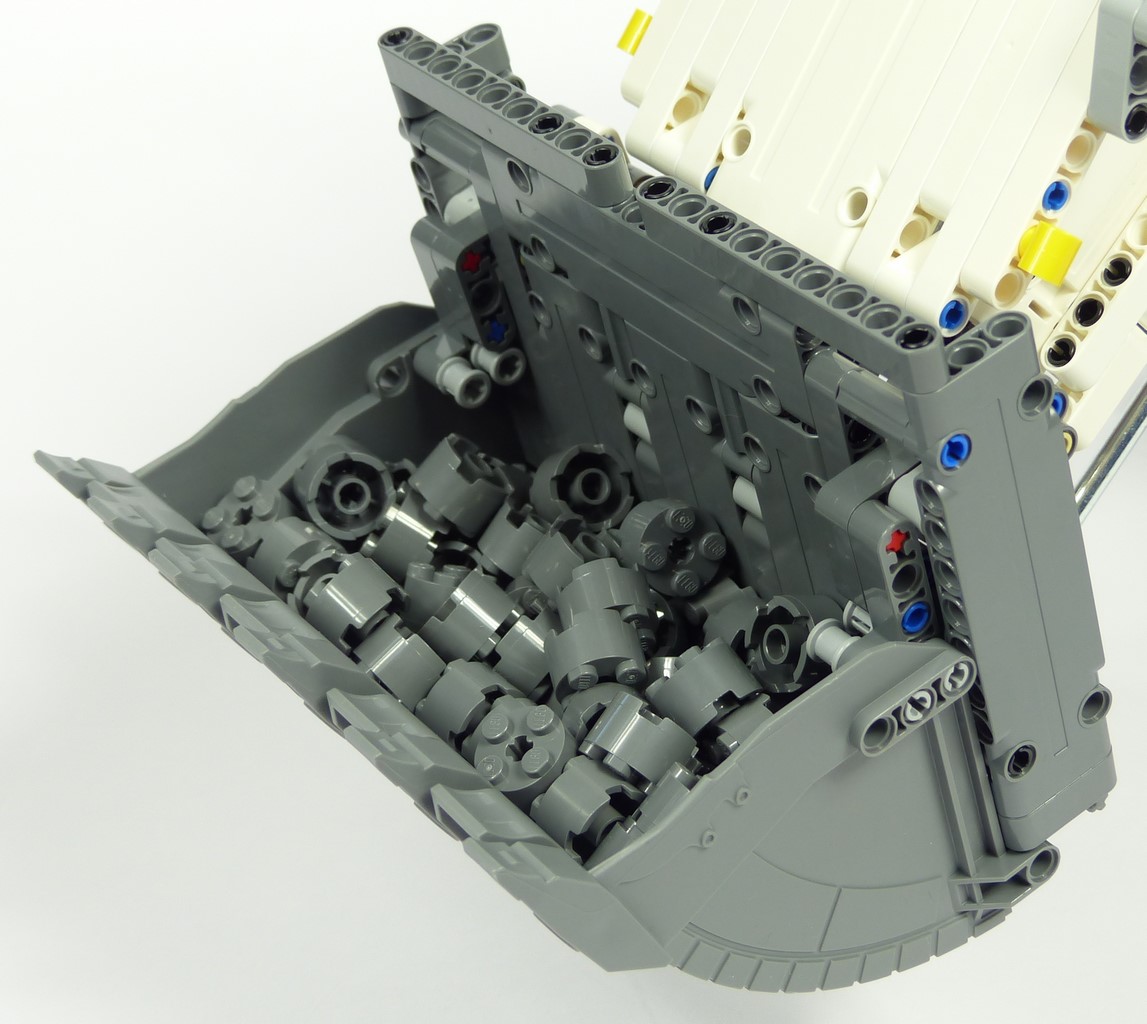
La seconde section du bras adopte une approche rigoureusement identique : carénages avec des arêtes saillantes, une face inférieure découverte et de belles volutes créées par les tuyaux pneumatiques. En gris clair, on a en plus les protections des branchements pneumatiques. L'habillage au niveau de l'articulation entre les 2 sections n'est pas optimal. On se consolera en se disant que c'est l'occasion d'apercevoir un peu la mécanique. Le dernier délice que nous offre cette #42100 est bien sûr le godet. Tout spécialement créé pour l'occasion, il jouit forcément d'un réalisme accru avec ses dents et nervures. Il estampille définitivement notre set comme étant une excavatrice R 9800.




Concernant les proportions, le modèle est assez juste au niveau du châssis et de la tourelle. Seul le bras semble un ou 2 tenons plus large que ce qu'il devrait être en réalité. Gageons que ce choix a été dicté par des impératifs mécaniques, à savoir laisser suffisamment de place aux différents vérins mécaniques pour s'entrecroiser.

Le déploiement de l'escalier constitue la seule fonction manuelle du modèle. En position haute, l'escalier est retenu par des connecteurs Technic. En position basse, l'escalier arrive juste au dessus du sol, sans le toucher. Toutes les autres fonctions de notre #42100 sont motorisées et télécommandées. Le modèle adopte une configuration technique assez simple puisque chaque fonction est contrôlée par un moteur électrique. Avec 7 fonctions, on a donc 7 moteurs. En conséquence, la mécanique n'est pas foncièrement compliquée. D'aucuns diraient que la tourelle est même une coquille vide... Le hub du châssis contrôle les 2 chenilles et la rotation de la tourelle. Le hub intégré dans la tourelle gère quant à lui les 3 paires de vérins mécaniques et l'ouverture du godet.




Les 2 trains de chenilles fonctionnent logiquement selon la même mécanique et utilisent chacun un moteur XL. En sortie de moteur, on a une cascade d'engrenages, tous en renvois droits : 12t, 20t, 12t, 20t, 12t, 20t, 12t, 36t, 28t et 36t (réduction finale : 125:7). Cela donne beaucoup de couple, chose absolument indispensable pour déplacer la bête. Le modèle met environ 20 secondes pour parcourir un mètre. C'est tout à fait correct pour la jouabilité et semble peu ou prou correspondre à la vitesse maximale de 26km/h du véhicule réel. On notera la présence d'un clutch linéaire après le 3ème engrenage 20t de chaque train. Les 2 mécanismes de propulsion ne présentent pas de fin de course à proprement parler mais cela permet de sécuriser les moteurs en cas de blocage extérieur (obstacle, frottement au sol insurmontable). Le modèle avance sans difficulté quelque soit la surface, mais, sans grande surprise, n'est pas en mesure de franchir des obstacles. Bien entendu, la direction se contrôle par une vitesse différenciée des 2 trains de chenilles. Cela induit un mouvement avec une composante transversale pour les trains, et donc une résistance plus importante causée par les frottements au sol. Si cela ne pose aucun souci sur une surface lisse, on entend au contraire le clutch linéaire débrayer lorsque l'on fait tourner le châssis sur une surface rugueuse (moquette). De manière générale, le modèle se déplace quand même très bien compte tenu de son poids.

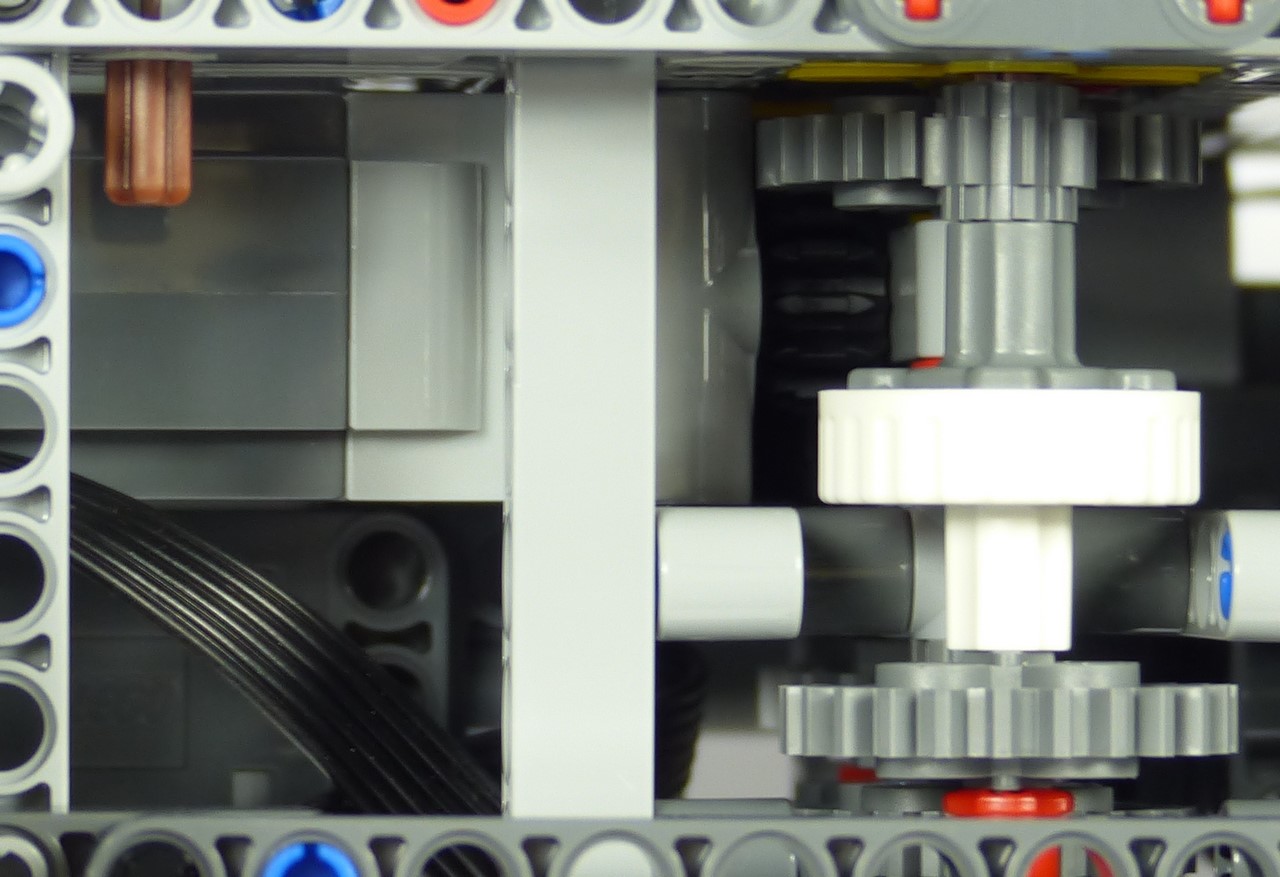
La rotation de la tourelle est la 3ème fonction intégrée au châssis. En sortie de moteur L, on a un renvoi d'angle fait de 2 engrenages à 12 dents. Ensuite, c'est à nouveau une succession d'engrenages en renvois droits : 36t, 16t, 16t, 24t, 24t, 8t, 24t, 8t, 24t, 20t et les 60 dents de la turntable (réduction finale : 81:1). Cette forte réduction n'est pas tant mise en œuvre pour générer du couple mais plutôt pour obtenir une vitesse appropriée. Au final, la vitesse de rotation de la tourelle est bonne : il ne faut que 16 secondes pour tourner à 360°, ce qui est un plus pour la jouabilité. Et cela permet accessoirement de conserver la tourelle immobile si l'on compense avec le châssis qui tourne en sens inverse ; pratique pour repositionner les chenilles ! Après le 3ème engrenage 24t du système, on trouve un clutch linéaire. Mais à moins d'heurter délibérément un obstacle avec le bras ou la tourelle, celui-ci ne débraye jamais. Pas même avec l'inertie lorsque l'on inverse brutalement le sens de rotation de la tourelle. Pour une bonne stabilité, la tourelle tourne en outre sur un plan frotteur de grande qualité qui est similaire à celui de la grue mobile tout-terrain #42082.


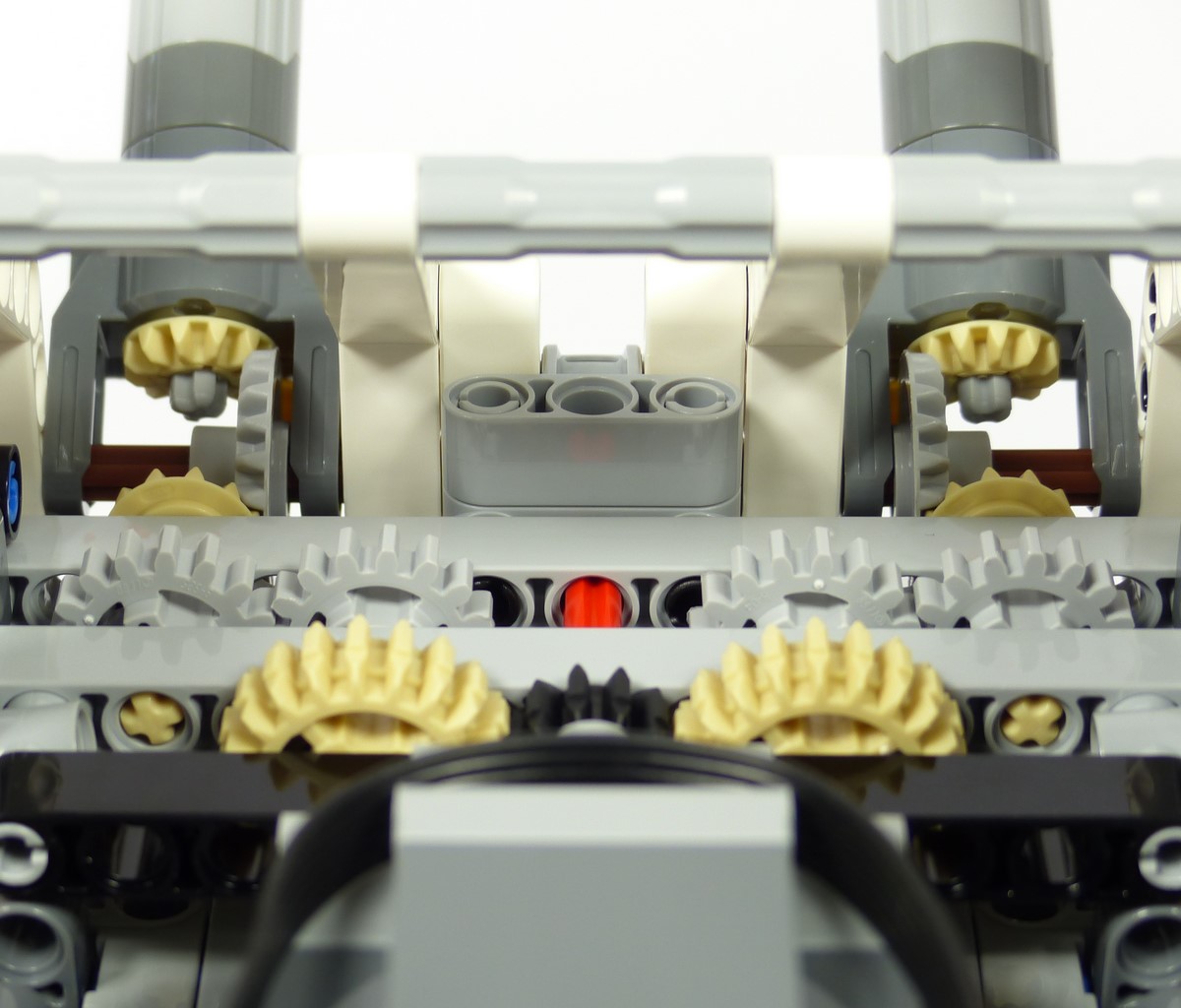
Pour rappel, les 4 fonctions restantes sont gérées depuis le hub de la tourelle. La mécanique qui permet de gérer l'articulation principale du bras est simple. Et c'est d'ailleurs la seule pignonnerie qui soit intégrée dans l'imposante tourelle. Autant dire qu'il y aurait encore la place pour y habiter à plusieurs ! En sortie de moteur XL, un 12t va distribuer la rotation de façon identique aux 2 vérins mécaniques. Ainsi, pour chaque vérin on a un engrenage à 20 dents, une paire de 16t, et 3 engrenages simple bevel dont un 20t libre pour passer le point de pivot en minimisant les frottements (réduction finale : 5:3). La réduction n'est pas si forte mais suffisante. Et en tout état de cause, à trop vouloir augmenter le couple, la vitesse deviendrait trop lente. En l'espèce, il faut 17 secondes pour effectuer une course complète dans le sens de la montée (et 1 seconde de moins pour descendre). C'est vraiment très raisonnable et ça assure une jouabilité convenable. Néanmoins, on remarquera que de par la configuration mécanique adoptée, les vérins mécaniques ont le corps situé en bas et la tige qui sort par le haut. Sur l'articulation principale de la R 9800 réelle, c'est l'inverse : les corps des vérins sont accrochés sur le bras et les tiges se déploient vers le bas.

Toujours gérée par le hub de la tourelle, les 3 dernières fonctions voient leur mécanique totalement intégrée à l'intérieur du bras. Cela permet d'avoir les moteurs électriques proches des vérins et donc de simplifier la mécanique d'autant. Ainsi, la seconde articulation du bras est gérée par le moteur L situé dans la partie gauche de la première section du bras. Après un 12t et un 20t, la mécanique repique vers l'arrière pour transmettre la rotation à 5 engrenages à 16 dents (dont 2 roues folles). Puis, ce sont 2 cardans qui permettent de passer le point de pivot des vérins (réduction finale : 5:3). Le temps nécessaire pour faire une course complète est proche de celui de l'articulation principale : il faut 14 secondes. Là encore, c'est une vitesse d'action plutôt bonne pour la jouabilité.


Pour faire pivoter le godet, le moteur utilisé est celui situé dans la partie droite du bras, juste à côté de celui de la fonction décrite précédemment. En sortie de moteur L, un axe passe à travers une roue folle du mécanisme de la seconde articulation puis débouche sur un 12t et un 20t à son extrémité. Ensuite, ce sont 6 engrenages à 16 dents en renvoi droit (dont 3 roues folles) et 2 triplets d'engrenages simple bevel en renvoi d'angle (dont 2 engrenages 20t libres) en contrebas qui permettent d'alimenter les vérins mécaniques (réduction finale : 5:3). Avec un moteur L et une réduction identique à celle de la seconde articulation du bras, le temps pour faire pivoter le godet d'un extrême à l'autre est également de 14 secondes ; très bien. Comme sur l'articulation principale du bras et compte tenu de la configuration mécanique, on remarquera que la paire de vérins de cette fonction est aussi montée en sens inverse : sur la vraie Liebherr R 9800, les corps des vérins sont attachés au godet et les tiges sortent vers le haut. Ces biais sur le positionnement des vérins chagrineront vraisemblablement les puristes mais demeurent pourtant un choix acceptable dans le cadre d'une reproduction Lego qui passe nécessairement par certaines simplifications. En terme d'utilisation, il est important de noter que les vérins de cette fonction sont branchés d'une part sur la première section du bras, et d'autre part sur le godet. Autrement dit, la seconde section du bras est "enjambée". Dans la pratique, cela signifie que les fonctions de pivot du godet et de la seconde articulation du bras ne sont pas totalement indépendantes. Par exemple, lorsque les vérins de la seconde articulation sont totalement rentrés, il n'est pas possible de sortir en totalité les tiges des vérins de pivot du godet. C'est géométriquement impossible. C'est la même chose dans l'autre sens : quand les tiges des vérins de pivot du godet sont totalement sorties, il n'est pas possible de replier la seconde articulation en totalité sans replier un peu le godet. Mais le modèle étant intelligent, il gère tout seul les conflits entre ces 2 fonctions. En effet, et en reprenant par exemple le cas de figure précédent, le modèle va détecter l'incompatibilité et replier automatiquement un peu le godet alors que l'on opère seulement la seconde articulation sur l'application smartphone. Génial ! Cette configuration où les vérins de pivot du godet sont parallèles à la seconde section du bras présente aussi un avantage majeur : lorsque l'on opère la seconde articulation du bras, l'inclinaison du godet est conservée dans presque tous les cas de figure, et ce en application du principe du parallélogramme déformable. C'est diablement pratique !



L'ouverture du godet est motorisée par un moteur L situé au bout de la première section du bras. La seconde articulation du bras est franchie en 2 étapes : d'abord avec un cardan et ensuite avec 3 engrenages simple bevel (dont un 20t libre). Après un axe qui traverse la seconde section du bras sur toute la longueur, on a à nouveau un triplet d'engrenages simple bevel pour passer le point de pivot du godet, puis ce sont 3 renvois d'angle faits par des engrenages à 12 dents qui permettent de transmettre le mouvement aux mini vérins mécaniques (réduction finale : 1:1). Ces derniers ouvrent le godet à 45° par des biellettes qui passent à travers le fond du godet. Cette fonction nécessitant peu de couple, on a une vitesse d'action rapide : il ne faut pas plus de 5 secondes pour effectuer une course dans un sens ou dans l'autre. L'effet de cette fonction est assez fascinant. Voir le godet s'ouvrir en 2 avec des mini vérins logés de façon discrète et délicate pour libérer la centaine de briques 2x2 round a quelque chose de grisant !




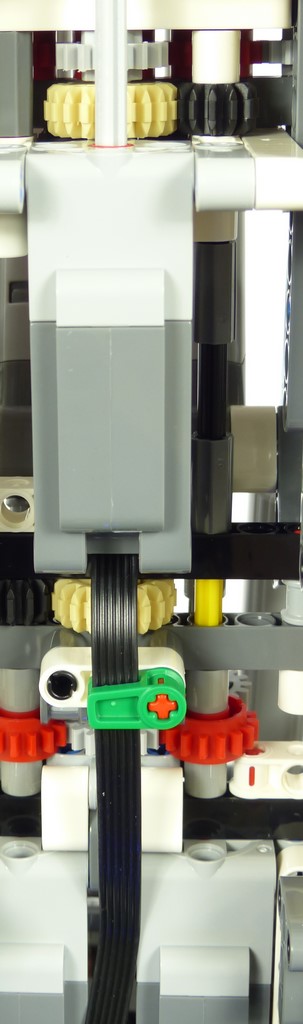
Pour contrôler notre mastodonte, il faut utiliser l'application Control+ sur smartphone. A son lancement, l'application nous propose de faire l'appairage des 2 hubs. L'opération est rapide ; environ 5 secondes pour chaque hub après avoir appuyé sur le buton vert. Les hubs sont facilement accessibles, même celui de la tourelle via un volet qui s'ouvre sur le dessus. Vient ensuite la phase de calibrage. Elle est gérée automatiquement par l'application et dure environ une minute. Pendant cette minute, le bras de l'excavatrice fait divers tests. Cela est essentiel pour 3 aspects. Premièrement, cela va permettre à l'application de reconnaitre la position du bras, chose indispensable dans le mode de contrôle à un doigt (expliqué ci-après). Deuxièmement, et comme les 4 fonctions du bras sont dépourvues de clutch normalement utilisé pour sécuriser la mécanique, le calibrage va permettre à l'application de détecter les fins de course. Ainsi, lorsque l'on atteindra une fin de course pendant l'utilisation du set, ce ne sont pas les moteurs qui caleront mais bien l'application qui coupera l'alimentation en amont. Et troisièmement, le calibrage va permettre à l'application d'agir en bonne intelligence pour gérer les incompatibilités de mouvements (entre la seconde articulation et le pivot du godet). On notera qu'il n'est pas obligatoire - bien que conseillé - de faire le calibrage à chaque fois que l'on redémarre l'application. Une fois cela fait, on n'a plus qu'à s'en donner à cœur joie ! On contrôle la propulsion et la direction par les 2 modulateurs verticaux situés à gauche et à droite de l'écran. Et pour le reste, c'est comme dans une vraie Liebherr R 9800 ! Le levier de commande gauche contrôle la rotation de la tourelle sur l'axe gauche/droite et la seconde articulation du bras sur l'axe haut/bas. Le levier de commande droit contrôle quant à lui l'orientation du godet sur l'axe gauche/droite et l'articulation principale sur l'axe haut/bas. L'ouverture et la fermeture du godet se gère avec 2 boutons de commande situés proche du levier droit. Les vitesses et puissances de toutes les fonctions sont satisfaisantes. A l'exception de l'ouverture du godet, chaque bouton de commande est proportionnel pour avoir un contrôle précis. Certes il faut un petit temps pour mémoriser quelle commande fait quoi, mais jamais un set n'aura offert une maniabilité aussi simple pour contrôler 7 fonctions ! Malgré les possibilités offertes, on maniera souvent une seule fonction à la fois (sauf pour les trains de chenilles, ça va sans dire). Eventuellement 2 à la fois si la manœuvre sur le bras n'est pas trop compliquée. Mais seuls les utilisateurs les plus aguerris pourront contrôler 4 fonctions en même temps en jouant simultanément sur les 2 axes des 2 leviers de commande. L'application nous propose aussi un mode de fonctionnement à un doigt. Avec le bras vu de profil, on oriente chaque section comme bon nous semble en la déplaçant sur l'écran. Si ce mode est effectivement plus simple d'utilisation, il n'est pas aussi intuitif qu'on pourrait le penser pour réaliser les mouvements voulus. En outre, il ne permet pas de contrôler les chenilles. Cela nécessite forcément de repasser sur le panneau de contrôle principal, qui est de toute façon infiniment plus authentique. Et parce qu'il est vrai qu'il n'est pas facile de maîtriser parfaitement une manœuvre, l'application propose de programmer des séquences. Pour cela, elle met à disposition une cinquantaine de blocs préprogrammés qui définissent à chaque fois une amplitude d'action sur une fonction. De cette manière, en combinant tous les blocs, on peut programmer tous les mouvements automatiquement. Mais attention, l'obtention d'une séquence bien programmée ne se fera qu'au prix d'une étude précise des mouvements au préalable. En effet, dans ce mode de fonctionnement l'application applique bêtement les instructions programmées sans tenir compte de la position de départ du bras, ni des fins de course, ni des incompatibilités. Cela peut donc rapidement tourner au grand n'importe quoi ! Une fois la séquence programmée et enregistrée, il est possible de l'intégrer au panneau de contrôle principal via les boutons numérotés 1, 2, 3 et 4 pour multiplier les possibilités de jeu. Bien que l'on ne puisse intégrer "que" 4 programmations simultanément, l'application permet d'en enregistrer autant que l'on souhaite. Il suffira ensuite simplement d'intégrer au panneau de contrôle les séquences appropriées compte tenu des opérations que l'on veut réaliser. Globalement, le panneau principal sans programmation est celui qui offre le meilleur compromis en terme de simplicité d'utilisation et plaisir de jeu.





Avec un set résolument orienté vers le Powered Up, il va sans dire que les composants électriques sont un peu les vedettes de cette boîte. C'est ainsi que l'on a 2 hubs, 3 moteurs XL et 4 moteurs L. Les 6 longs vérins mécaniques et le godet sont aussi des pièces de premier choix. Malgré sa mécanique plutôt simple - un moteur par fonction - notre excavatrice est plutôt bien dotée en pièces dentées. Il y en a 117 parmi lesquelles on retiendra principalement une turntable, une mini turntable, 5 roues folles, 7 engrenages 36t, 2 engrenages 28t, 34 engrenages 20t libres, 4 engrenages 24t et 4 quarts de couronne. Dans les autres pièces qui valent le détour on mentionnera la présence de 3 clutchs linéaires, 2 mini vérins mécaniques, 4 barbotins, 104 maillons de chenilles, 3 cardans, 33 cadres Technic et 58 éléments de carrosserie. En fait, il n'y a bien que des pièces de boîte à vitesses qui manquent à l'appel...
L'inventaire est disponible ici.
Pour de la complexité pure, ce n'est vraisemblablement pas dans cette boîte qu'il faut chercher. Pour le reste, le modèle donne entière satisfaction. Son design est d'une grande authenticité, son inventaire frise l'excès, ses fonctions sont bien réalisées et la jouabilité au smartphone est un vrai régal ! Cette Liebherr R 9800 #42100 permet vraiment de se mettre dans la peau du conducteur d'un de ces gigantesques engins miniers...

