







Dans l'idée, le rover sera pilotable à distance PFS, les fonctions embarquées sont :
- -suspensions indépendantes par barre de torsion
-direction indépendante sur les deux essieux
-propulsion 4x4
Au delà de l'aspect mécanique, le but se situe au niveau de l'interface de commande. En effet je prévoie un commande de type joystick multiaxe comme sur la vrai rover (qui est embarqué). En avançant ou tirant le levier, on fait avancer plus ou moins vite. En inclinant à droite ou à gauche le manche, on fait tourner un essieu ou plusieurs essieux. Le choix du nombre d'essieu moteur se situe sur l'interface avec un interrupteur ou une troisième commande.

J'ai envisagé plusieurs solutions :
La solution mécanique embarquée
La première que j'ai testé, à savoir un système avec un différentiel sur le châssis. Un moteur commande une entrée du diff et un autre commande la couronne. Comme ça lorsqu'on actionne le moteur d'entrée, un des essieux tourne, quand on actionne le moteur de la couronne, les deux essieux tournent à cause des planétaires dans le différentiel.
Dans la pratique : ça ne fonctionne pas : les planétaires ont trop de jeu (presque 1/8 de tour!) ce qui conduit toujours à un décalage des deux essieux ou un des essieux immobile.
La solution : placer le diff avant les Vis sans fin de façon à réduire le jeu (plus un élément mécanique à du jeu, plus il faut le placer prés des moteurs et des composants à grande vitesse car le jeu / tour est ainsi moindre que pour un composant qui ne fait qu'un tour en bout de chaîne cinématique). Comme c'était usine à gaz, je suis partie sur une autre solution.
La solution logiciel : un moteur par essieux, pilotage électronique
C'est ce qui est réalisé en vrai sur la rover, chaque essieux possède un moteur de direction (en fait 4 pour assurer la redondance) et chaque moteur est piloté électroniquement selon le déplacement du joystick et les interrupteurs de direction.
Dans la pratique : comme j'utilise le PFS, il faudrait que lorsque je déplace le joystick, il appuie sur un levier de commande pour commander un moteur, et que en mode deux essieux, il appuie sur le deuxième levier pour commander les deux moteurs dans des sens différents. Comment commander alors 1 moteur sur le levier 1 et deux moteurs sur le levier 2 en ayant bien sur un moteur en commun ?
La solution : peut être avec un système à plusieurs canaux ou avec du NXT (Programmation aisée). Comme je ne dispose que de deux canaux et pas de NXT, Je suis partie sur la dernière solution.
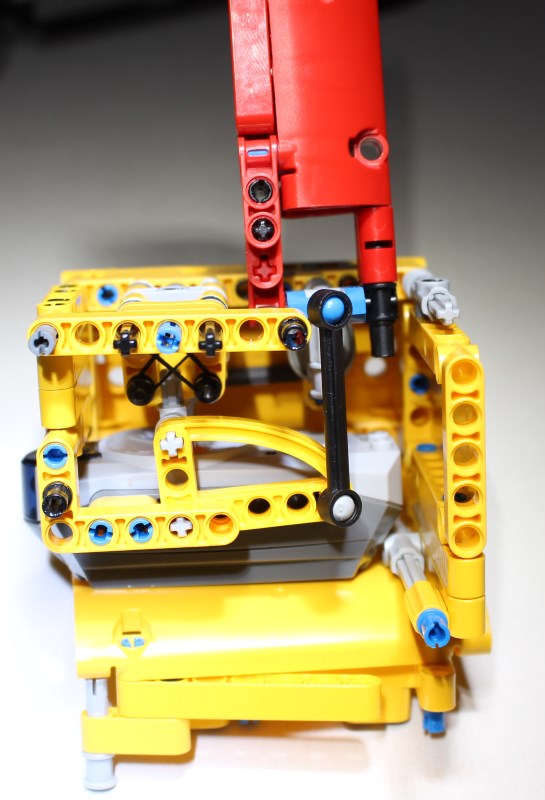
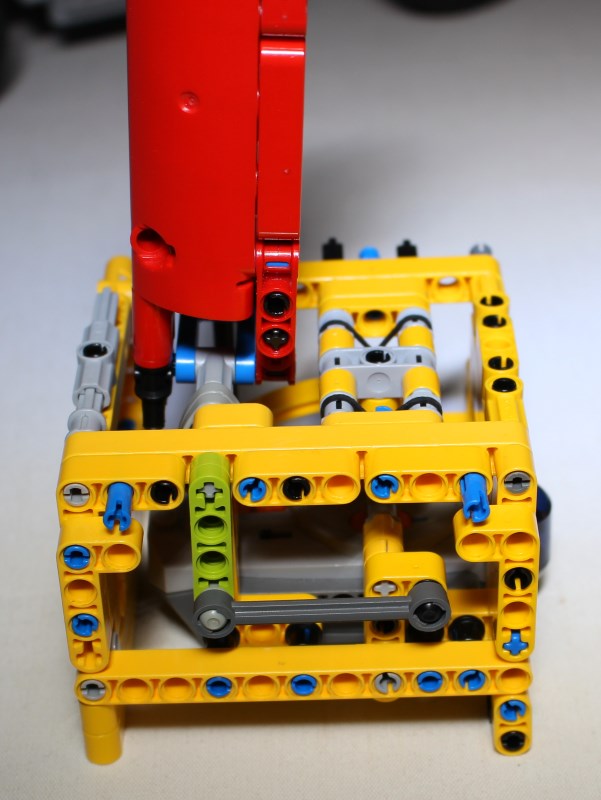
La solution de l'interface mécanique : un moteur par essieux, pilotage mécanique
Plutôt que d'avoir la mécanique embarquée sur le châssis, je l'embarque sur l'interface de pilotage.
Dans la pratique : Il faut que l'inclinaison du joystick commande 1 moteur dans un cas (donc 1 levier de la télécommande) que dans l'autre cas il en commande deux levier après avoir switcher. Le switch est un dispositif qui permet d'opérer soit sur un levier seul (un seul essieu directeur), soit sur deux leviers (sur les deux essieux).
La solution : : un système de loquet qui n'agit que sur un levier et bloque l'autre dans une position, et agit sur les deux dans une autre position, réalisé mécaniquement.
Pour synthétiser les différents possibilités de contrôle entre le véhicule, la télécommande PFS et l'interface de commande (joystick), j'ai fais un schéma de la mort en code :
- Code: Tout sélectionner
|----------------| |----------------| |----------------|
| | | | | |
| Joystick |------------>|Télécommande PFS|----------->| Rover (moteur) |
| | | | | |
|----------------| |----------------| |----------------|
Soit j'agis mécaniquement sur le rover (diff qui marche pas), soit j'agis sur l'interface PFS / Rover (codage des informations avec des IR receiver ou NXT), soit j'agis sur l'interface Joystick / PFS (système de commande mécanique entre le joystick et la télécommande).
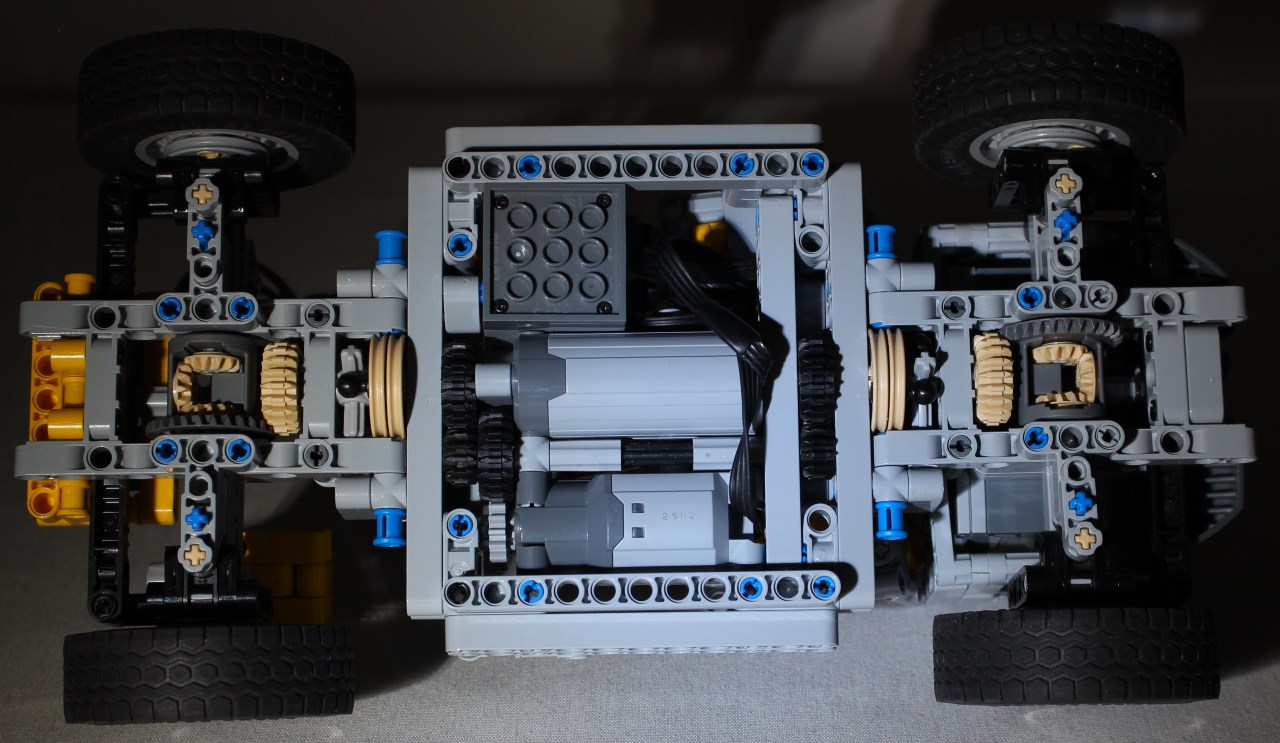
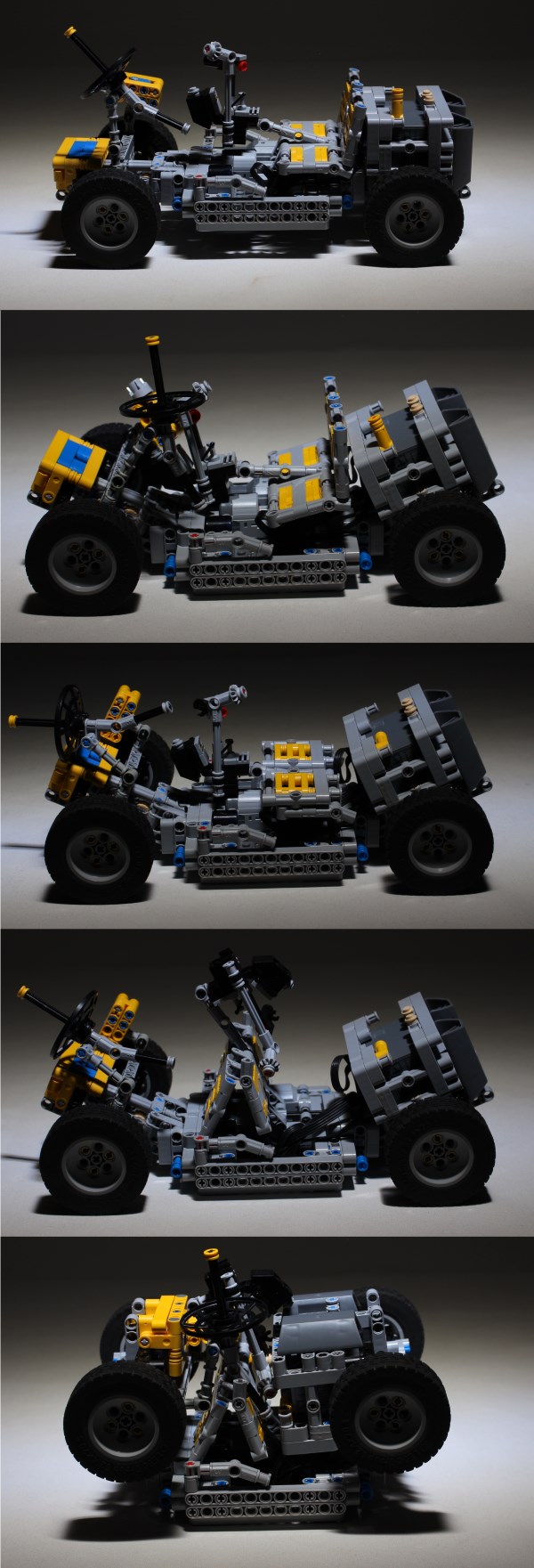
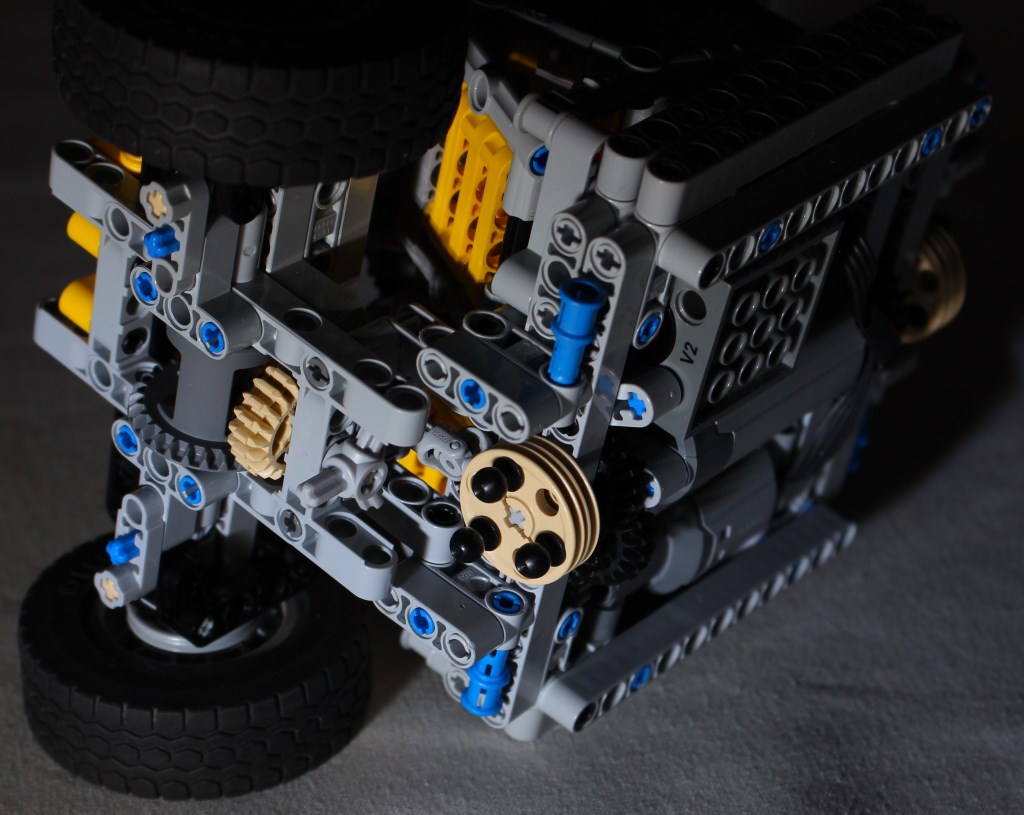
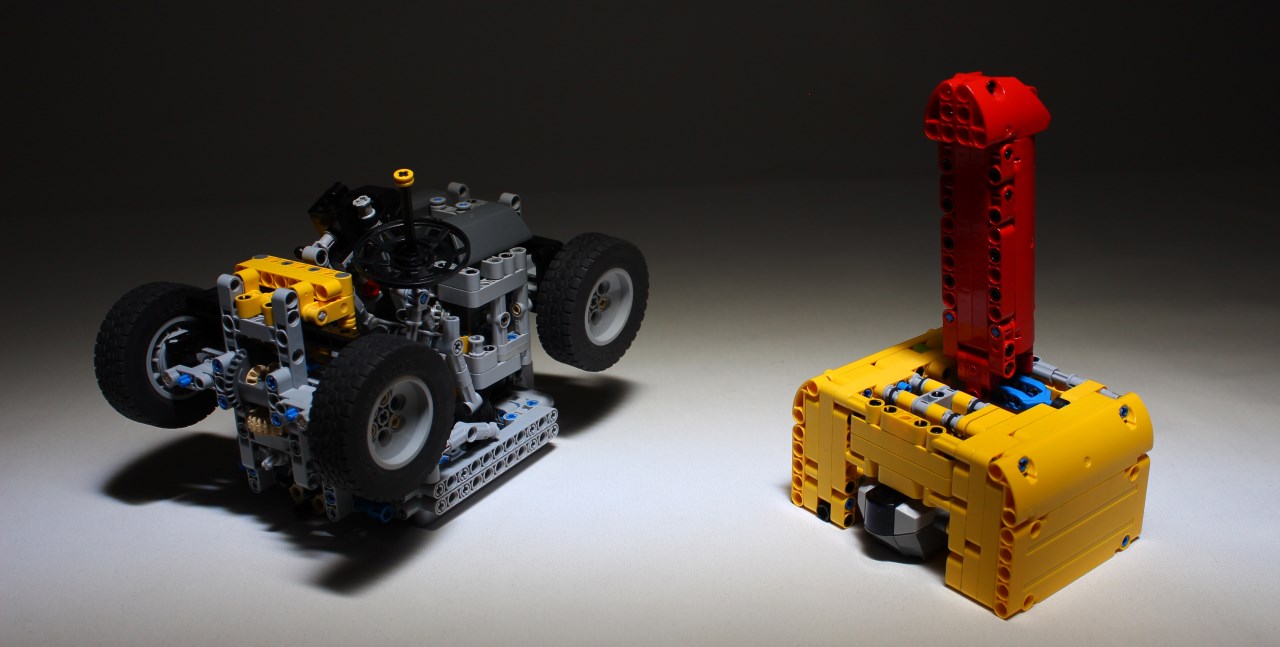
Voici le prototype avec un moteur par essieux (M) et un moteur pour la propulsion (XL) avec comme réduction 12/20 12/20 12/28.


Désolé si c'est pas très clair les explications, il y a plusieurs possibilités et c’est pas simple de tout expliquer pour justifier mes choix.
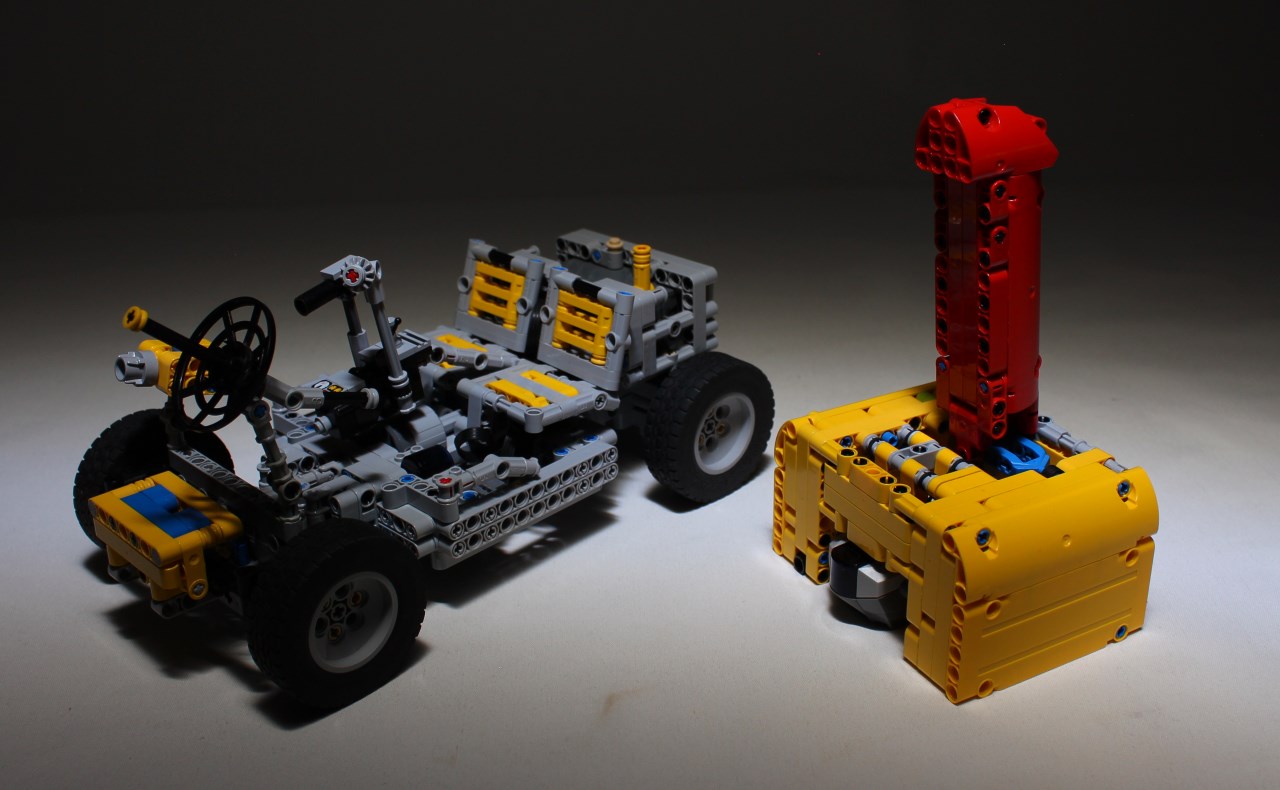
Et un petit bonus :
.gif ":)")




























{kind=link}