






Alors, le projet et une Lada Niva 4x4 orienté Trial Truck. Donc motorisée.
D'abord voici ce qu'est une lada niva :


http://fr.wikipedia.org/wiki/Lada_Niva
La niva a des suspensions indépendantes à l'avant à triangle. A l'arrière c'est un pont suspendu avec une barre de centrage et couple amortisseur / ressort obliques. Le moteur est un 4 en ligne (Essence ou GPL). Elle possède aussi une boite de transfert pour passer de 2 roues motrices avant à 4 roues motrices. Deux leviers de vitesse dans l'habitacle. Je ne sais pas si les diff sont bloquables, surement que oui sur certaines versions. En version nue (qui date de 1973 mais marche toujours aussi bien), il y avait les 4 roues motrices avec boite de transfert ce qui était une première à l'époque et a contribués à son succés (pas chère et bien équipée pour le tout terrain).

Pour mon moc, il y aura :
- -4x4 avec XL et moteur L4
-Direction sur l'essieu avant avec un M
-Renvoi de direction au volant
-Suspensions pendulaires contraintes sur chaque essieux
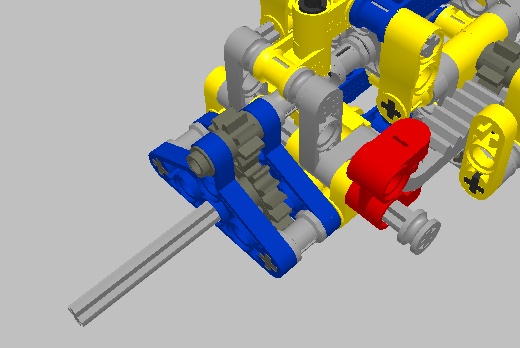
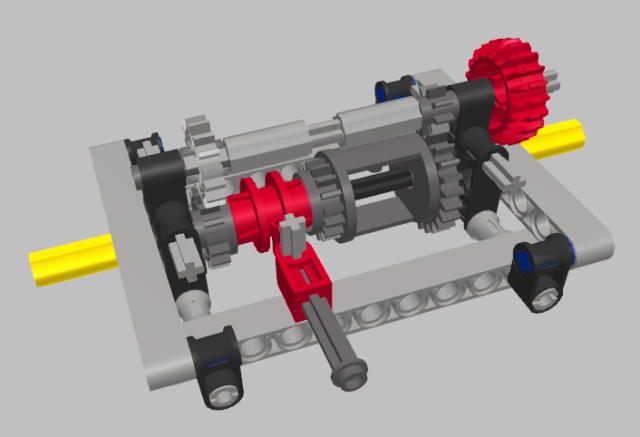
-Boite de vitesse 2 rapport 1:1 , 1:3
-Treuil à l'avant avec un M
Premier protoype
Le premier prototype était le plus proche de la Niva techniquement parlant. Il y avait une boite de transfert complète basée sur ce système :

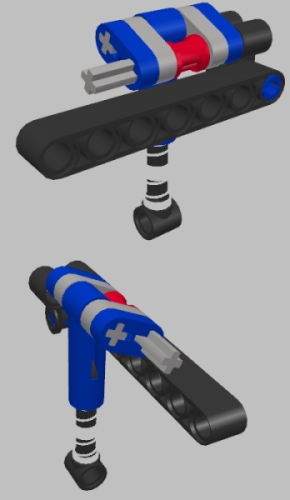
Les essieux étaient aussi libres avec un centrage à 3 barres + ressort. Un barre de centrage axiale et 2 autres radiales. La transmission se faisait par cardan jusqu'à la boite de transfert. Ce type d'essieu était particulier parce que c'est le premier que je construisais sans cardan. C'est à dire qu'avec des engrenages. Le voici :
Fichier SR3D builder
L'avantage principal de ce type de transmission est déjà de ne pas casser des cardans (mes précieux 3L) et ensuite être compact. En effet si on compte le nombre de tenons à partir du point de pivot des roues (fusée et porte fusée) avec le cardan et le pont portique jusqu'aux roues, on a 4t.
Mon précédent essieu avec cardan :
La distance entre les points pivots est de 8t, on rajoute 3t de chaque coté à cause du cardan et pont portique, on arrive à une largeur de voie entre roues de 14t. Avec le type d'essieu à engrenage, les engrenages de renvoi d'angle servent aussi d'engrenage pour le pont portique. On a ainsi une distance du point pivot à la roue de 3t. La longueur entre les points pivot ici est de 9t, soit 1t plus gros, parce que je voulais que ça soit rigide et sans construction bâtarde. On arrive à une largeur de voie entre roues de 13 à 14t.
Pour résumé, à même échelle, la solution tout engrenage permet
- -Eviter de casser ou fendre des cardans, même après un pont portique
-Réduit la largeur de voie, permet donc une plus grande rigidité du châssis de l'essieu
Pour les inconvénient, il n'y a pas plus de frottement que ça même si on pourrait penser le contraire (l'axe de pivot sert aussi de guidage).
Cependant, avec ce premier prototype j'avais un problème, les roues bien que ne touchant pas l'essieu étaient assez prés du porte fusée de la roue (le moyeu si vous préférez) :

Le problème est que lorsque je passais un obstacle un peu dure, la roue avait tendance à trop se rapprocher et frotter contre l'essieu ce qui était catastrophique pour la motricité. Conjointement à ça, j'avais des problèmes avec le système de suspension à rotule. Le problème était que les barres de rotule ont du jeu ce qui faisait que l'essieu n'était pas tellement rigide, en plus de faire des à-coups sur le transmission. Enfin, comme dit ici : post54586.html#p54586 La boite de transfert ne marche pas du tout est ne permet pas de passer le couple d'un XL, avec ou sans réduction, la solution possible est de mettre des 16 de soutien à coté. J'ai préféré revoir entièrement le châssis et les essieux.
Deuxième protoype
La première chose à régler était les essieux, j'ai choisis de repartir sur un type d'essieu avec des moyeux dans les roues, un peu comme un pont portique. Néanmoins, comme les roues font 81mm, leurs centres ne permet pas de rentrer une barre de 5t ce qui aurait été pratique pour faire un moyeu résistant. J'ai donc eu recours à l'emploi de pièce de vérin mécanique pour créer le renvoi d'angle et le moyeu :
Fichier SR3D builder
Ce type d'essieu permet d'avoir suffisamment de garde au sol tout en solutionnant le problème de frottement des roues vu que le renvoi d'angle se fait au niveau du moyeu de roue et non plus haut. La solidité est aussi importante grâce à la barre transversale et aux axes de direction soutenus en 2 points.
Vous remarquerez aussi la turntable. Je vous explique : l'essieu libre du prototype précèdent était une vraie galère. Le prototype 1.5 avait le même problème même s'il avait 5 liens au total. Il restait un jeu qui faisait que l'essieu pouvait trop bouger à mon gout. Je préfère que les essieux soit parfaitement tenus plutôt qu'ils ballotent (ca m'inspire pas confiance et donne des à-coups sur la mécanique). Seuls les essieux pendulaires offrent cette tenue mécanique qui permet d'avoir des essieux bien maintenus. Aussi même si c'est moins réaliste, les TT lego sont destinés au franchissement, le pendulaire remplie très bien son rôle alors. L'aspect essieu libre permet d'avoir un essieu qui peut s'affaisser comme en vrai mais en lego compte tenu des vitesses ça n'arrive jamais, ça peut donc se substituer à un essieu pendulaire.
La turn table pour l'essieu permet d'éviter d'avoir un axe moteur et pendulaire ce qui occasionne des frottements. Toute la charge est répartie sur la turntable et sur le pin de fixation opposé (qui n'est pas moteur).
A la suite de ça, pour le châssis, j'ai repensé tout le châssis avec un axe principal et supprimé tout les cardans, le type de transmission est analogue à l'unimog V1 ce qui marche très bien.
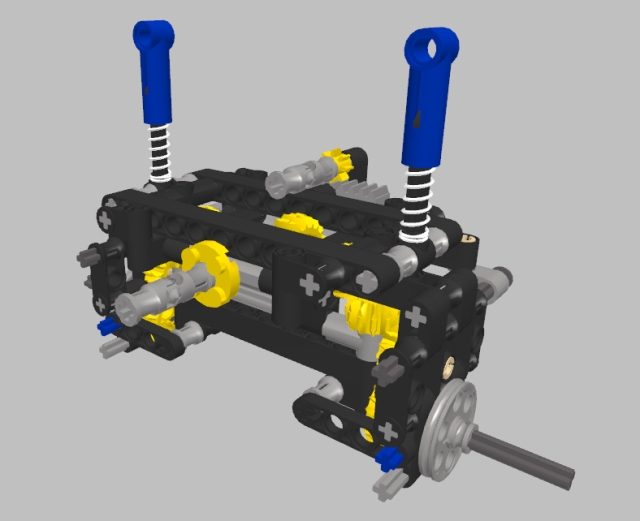
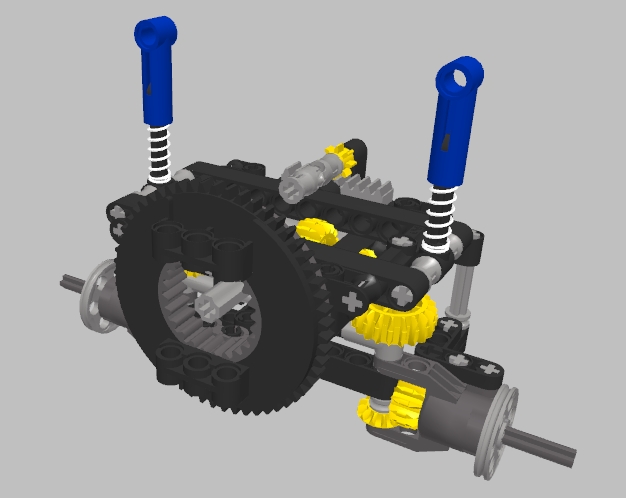
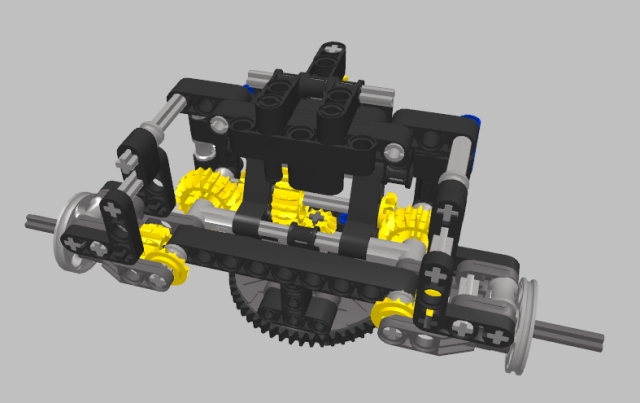
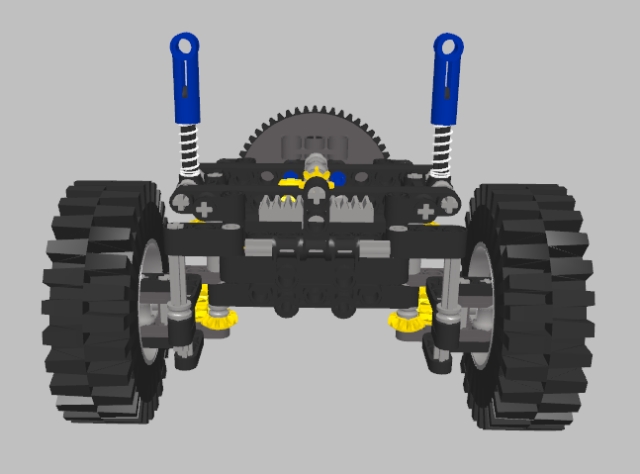
Le MOC maintenant
On y arrive, voici d'abord les photos :


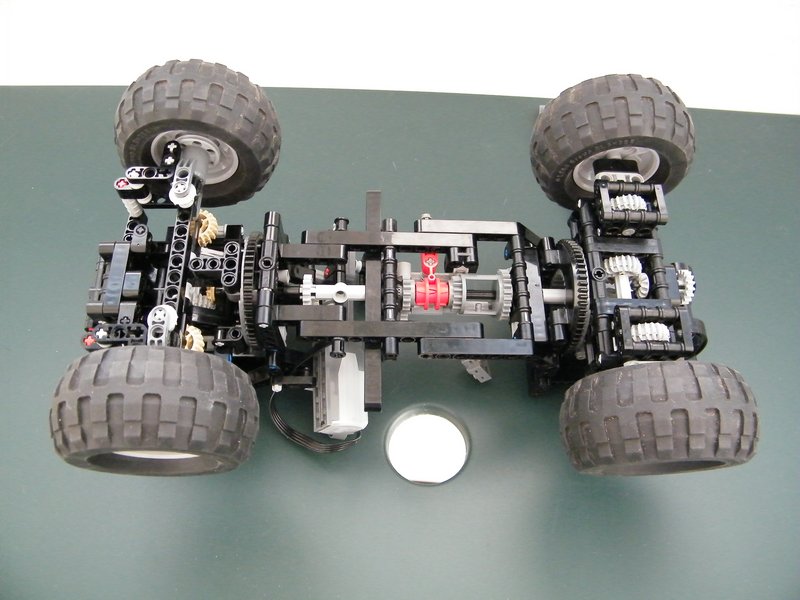
Les améliorations par rapport à mon unimog précédent. Bien que soit différent :
- -plus de cardans, que des engrenages
-Essieu avant contraint, vous en rêviez, je l'ai enfin fait ^^ En y prenant en compte au début de la conception
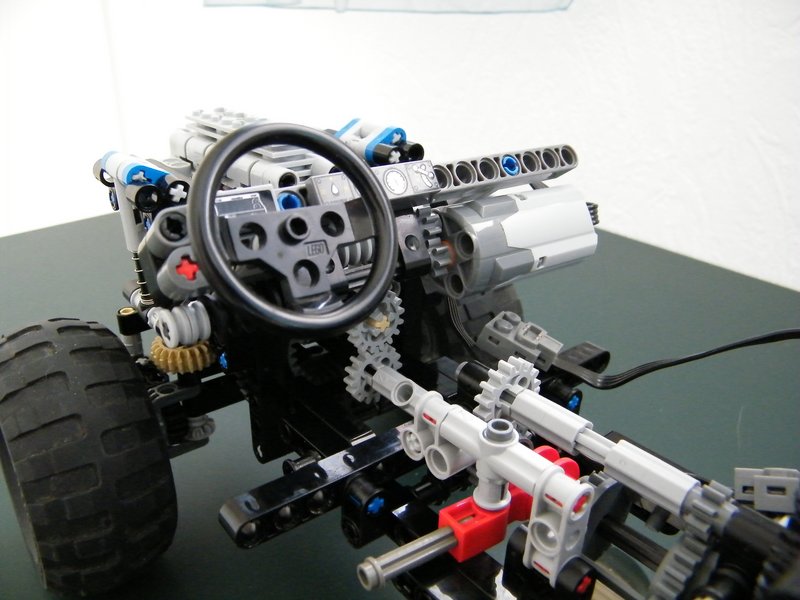
-Renvoi au volant, sur un 4x4 de cette taille, c'est indispensable
-turntable dans le châssis, cad qu'elle ne dépasse pas du châssis, le point pivot est donc 3t plus haut malheureusement mais c'est comme sur l'unimog V1
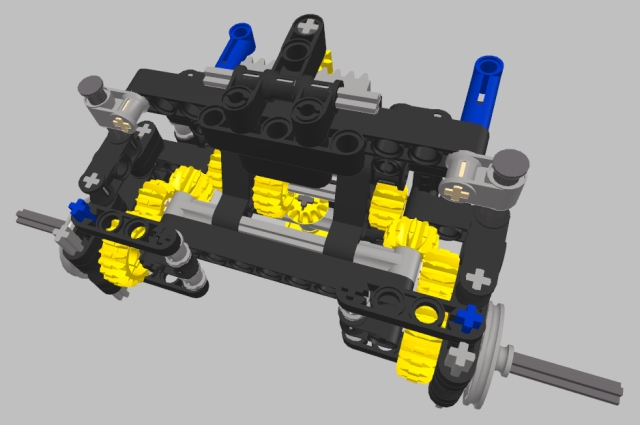
Le mécanisme de direction est assez particulier, plutôt que de cacher le moteur M dans le châssis et faire un renvoi au volant, j'utilise directement l'axe du M pour entrainer la direction avec cardan et le volant. Le moteur est fixé dans la tableau de bord.
La boite de vitesse est très solide, les renforts sont intégrés tout au début de la conception et non après (défaut du premier châssis). L'essieu arrière est plus simple que celui avant et surtout n'a pas les mêmes dispositions des renvois engrenages. Ça me permet de libérer de la place et de mettre le XL très bas dans le châssis (mieux pour la stabilité) :
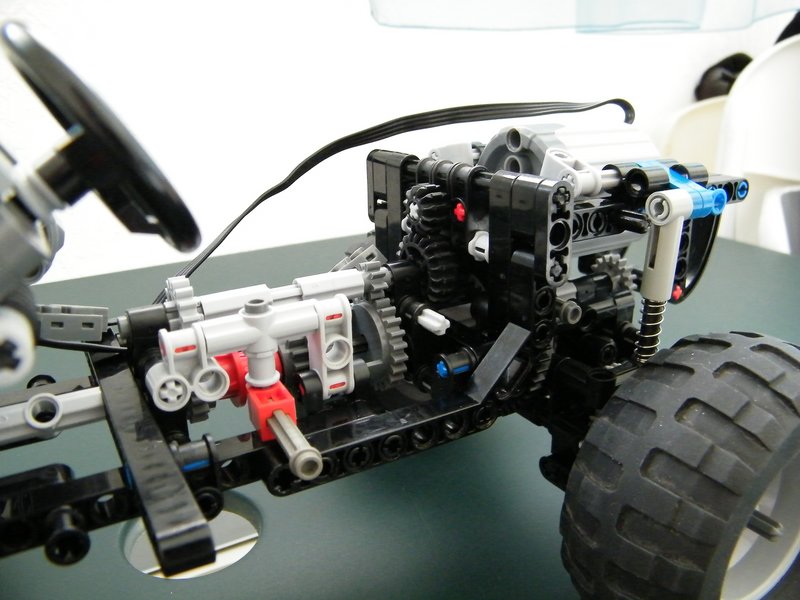
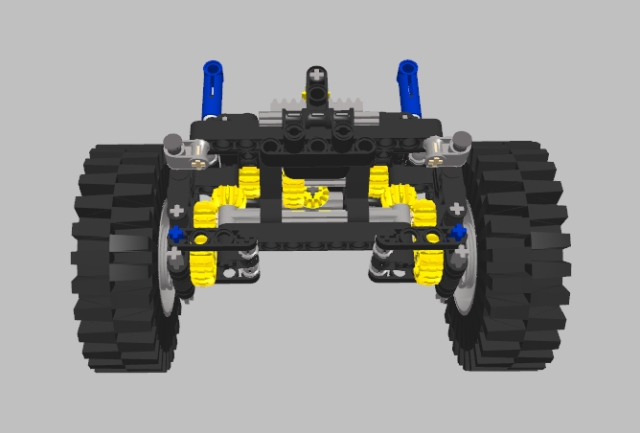
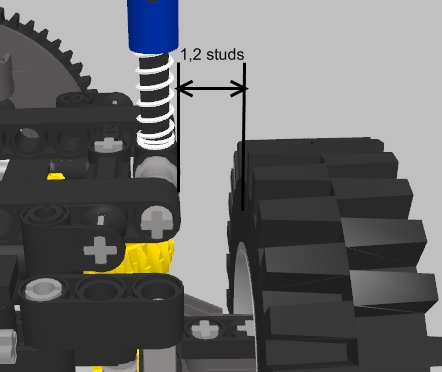
Enfin pour le système de suspension, les ressorts ne sont pas pré-contraint. Le système employé est le même que sur mon unimog avec deux variantes de butée. Le croisement de pont est bon. Les ressorts sont suffisamment souples et la contrainte de l'essieu avant permet une meilleur stabilité (surtout au niveau du centre de gravité en devers).



Voila c'est un peu long mais il fallait que je dise tout ça au moins au début. Pour la suite du projet, je vais faire une carrosserie squelette temporaire pour faire des vidéos ce week-end. Les performances s'annoncent bonnes, surtout grâce au châssis rigide et aux essieux maintenus (c'est un plaisir de voir passer un TT des obstacles sans se déformer ni galèrer).
Pour ceux qui aiment les Niva, voici deux créations :
http://www.brickshelf.com/cgi-bin/gallery.cgi?f=378999 (ça galerie compte d'autre 4x4 très bien fait)
http://www.brickshelf.com/cgi-bin/gallery.cgi?f=387653 (très bon aussi, plus model team que technic).
Si vous avez des questions ou des remarques, n'hésitez pas
.gif ";)")

















 le niva est disponible en 3 motorisation , essence , diesel ( moteur peugeot ) et gpl ( moteur de base essence ) , pour ce qui est de la transmission il s'agit d'un 4X4 permanent ( donc impossible de passer de 2 roues motrices à 4 roues motrices vu que les 4 roues sont tous le temps motrices ) , alors sur tous les modèles il est possible de faire le bloquage de différentiel , et de passer de boite courte ( petite vitesse ) à boite " longue " .
le niva est disponible en 3 motorisation , essence , diesel ( moteur peugeot ) et gpl ( moteur de base essence ) , pour ce qui est de la transmission il s'agit d'un 4X4 permanent ( donc impossible de passer de 2 roues motrices à 4 roues motrices vu que les 4 roues sont tous le temps motrices ) , alors sur tous les modèles il est possible de faire le bloquage de différentiel , et de passer de boite courte ( petite vitesse ) à boite " longue " .




 J'ai hâte de voir comment tiendra la caisse! Bon par contre c'est pas avec la tienne qu'on aura une nouvelle blague sur les Lada
J'ai hâte de voir comment tiendra la caisse! Bon par contre c'est pas avec la tienne qu'on aura une nouvelle blague sur les Lada 






