

Avec sa forme on dirait une sorte de chien robot.
Je vois que les roues, j'allais dire les pattes, du milieu sont excentrées par rapport aux autres, pourquoi ?
Rover Martien
|
Heureux possesseur du rare #8082, de 3 #8880, 2 #8865, 1 #8860 et 2 #8868.
|
|
C'est le cas dans le vrai, la roue du milieu est tenue par le côté et pas par le haut comme les deux autres, pas besoin d'orientation. Mais c'est vrai que c'est plus prononcé sur le mien.  |

|
Magnifique projet, et surtout, démesuré.
En tant que fan du Rover Curiosity (que j'ai vu à l'occasion au LATMOS qui avait fait la ChemCam, ça doit te dire quelque chose .gif ";)") ), et donc de Persévérance, il me semble que le mouvement des roues montré dans la vidéo n'est pas fidèle : le rover ne prend pas de virages mais tourne sur lui même, avant de filer à nouveau en ligne droite. ), et donc de Persévérance, il me semble que le mouvement des roues montré dans la vidéo n'est pas fidèle : le rover ne prend pas de virages mais tourne sur lui même, avant de filer à nouveau en ligne droite.Concernant le design, j'ai hate de voir comment tu va l'habiller un peu avec toute sorte de tubes et cables qui imiteront les instruments scientifiques, et puis j'ai hate de voir ce que donnera le petit bras robotisé aussi ! .gif ":)") A l'époque de Curiosity, j'avais fait un petit modèle avec les moyens du bord, bon ça n'a rien à voir avec le monstre que tu proposes, mais ça à le mérite d'être dans le même sujet : Authenticity
Fonctionality Challenging building |



|
Petit HS, ton modèle m'a fait penser à au set 8022 : http://www.technicopedia.com/8022.html Heureux possesseur du rare #8082, de 3 #8880, 2 #8865, 1 #8860 et 2 #8868.
|
|
Merci! En effet, j'ai fait en sorte que toutes les roues avancent dans la même direction. J'essayerai en mode je tourne sur moi même ce soir. en attendant, quelques photos d'avancement. Il commence vraiment à prendre forme:    Il reste maintenant à travailler le bras de devant. Toutes remarques et commentaires sont les bienvenus! |
|
Voilà, en séparant les commandes des roues droites et gauches |

|
peut pas mieux dire Concernant le circuit imprimé sur le dos de la bête, il a une utilité ou il ne fait que de la déco ? |

|
c'est bien de mettre la minifig, on se rend mieux compte de la taille de l'engin... faut reconnaître qu'il en impose. Beau travail. J'aime particulièrement les roues, mais l'ensemble est intéressant. Sans les petits inserts en cahoutchou dans les chenilles, ça n'est pas trop poussif ? vu la lenteur ça ne semble pas un problème mais justement, es-ce que ça ne participe pas aussi à dans le sens d'un manque de couple ?...
 |


|
Merci!
Pas d'utilité fonctionnelle, il s'agit d'une maquette des composants que mon entreprise fabrique pour le spatial. Le but est de simuler l'ordinateur de bord du rover.
tu parles de quels inserts? Je pense qu'avec la foultitude de moteurs / engrenages qui tournent en même temps, il y a cette impression de poussif. Mais il n'y a aucun moteur qui force vraiment (je pense que j'aurai le cas avec le bras robotisé, à confirmer). C'est juste que le rover est ultra lent de base  Autre point à améliorer, sur la commande moteur. Ce n'est pas contrôlé précisément. il serait beaucoup mieux d'avoir des sortes de séquence qui contrôlent plusieurs moteurs / mouvements en même temps. Je vais aussi travailler dans ce sens. |
|
Les chenilles possèdent des trous dans lesquels on peut clipser des embouts de caoutchouc pour améliorer le grip.
J'ai trouvé cette image: https://cdn.shopify.com/s/files/1/0070/ ... 1600889909 Désolé pour le lien pourri en plus c'est du compatible... |
|
Ah j'avais mal compris merci. Ce n'est pas vraiment possible dans mon cas, car j'ai connecté tous les liftarm avec des pins noirs qui bloquent tous ces trous.
Photo du tout premier essai:  Une autre solution possible que j'avais vue serait de mettre des petits élastiques en croix autour de chaque morceau de chenille, mais cela nuirait au design. |
|
Déjà que la structure/supports de roue se tordent un peu quand tu bouges les roues, ne rajoutes rien sur les chenilles pour augmenter l'adhérence.
Laisses les roues glisser au sol, ça aidera / corrigera naturellement les problèmes d'alignements. http://www.brickshelf.com/cgi-bin/gallery.cgi?m=BUZ
Aménagement de Garage en cours |



|
Bonsoir,
Merci à tous pour tous les échanges et toutes les remarques, voici la version qui a été finalement présentée:   [/url] [/url]Avec le bras déployé  [/url] [/url]Le bras possède 4 degrés de mouvements, et intègre au bout une petite plateforme de présentation rotative.  [/url] [/url]La tête Supercam:  Le haut du rover:  Et une vue rapprochée d'une des roues 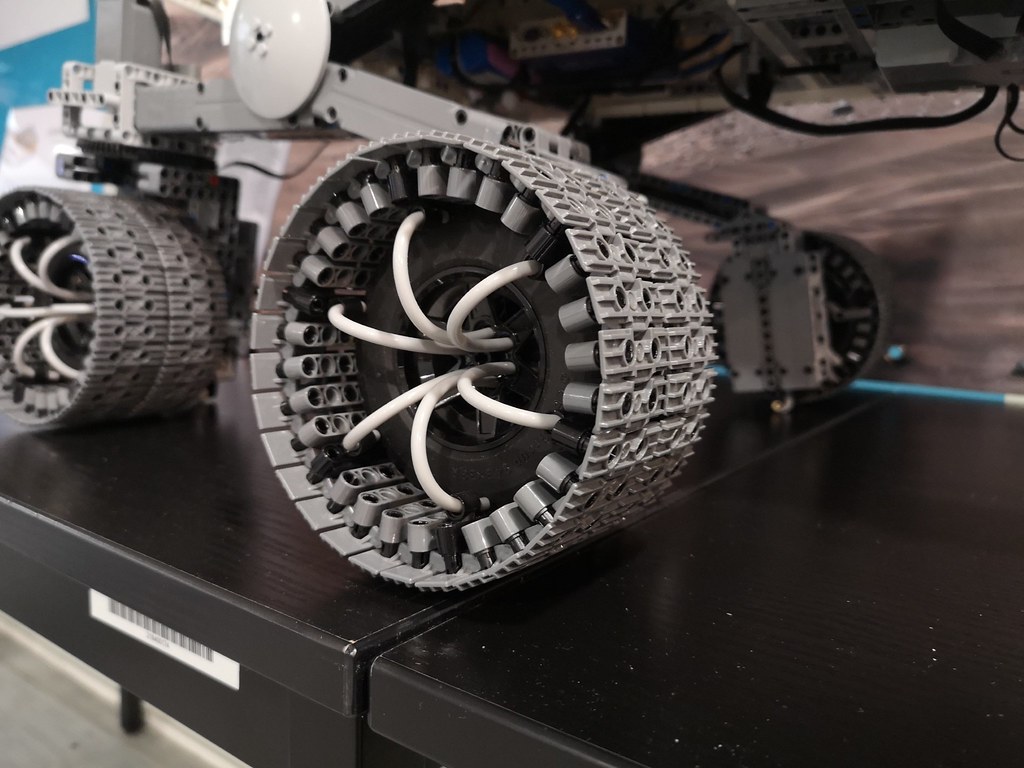 Une vue de l'intérieur:  La petite boite bleue que vous voyez est un système nommé brique Spacewire. Il s'agit de l'équivalent de l'Ethernet, mais pour le spatial  De l'autre côté sera connecté par USB un ordinateur portable pour le traitement image. De l'autre côté sera connecté par USB un ordinateur portable pour le traitement image.Et à côté une petite carte PCB qui intègre un interrupteur pour la caméra ainsi qu'une batterie rechargeable. Voilà, il ne reste plus qu'à attendre que le vrai se pose sur Mars, le 18 Février prochain! specs finales: 70cm L x 52cm l x 65 cm H Echelle 1/5 entre 4000 et 5000 pièces 10 kg 16 moteurs / 4 Hub Contrôle via tablette/SBrick |
|
 Ça mérite un reportage dans la catégorie science et espace sur Arte. Bravo Ma collection sur brickset :
https://brickset.com/sets/ownedby-Guybrush_THREEPWOOD |

{kind=link}
Retourner vers Vos MOCs Technic
Qui est en ligne ?
Utilisateurs parcourant actuellement ce forum : Aucun utilisateur inscrit et 32 invités