






Le principe de ce métier à tresser et d'entrecroiser des fils autour d'une corder principale pour venir tresser un motif qui constitue la corde finale. On peut l'utiliser ainsi pour tresser des cordes ou des tresses mais est aussi utilisé pour constituer la trame sur certaines pièces en fibre de verre ou carbone. Voici un exemple simple d'un métier à tresser des cordes verticales :

(combinaison de deux métiers à tresser)
Tout le génie de ces machines est le mécanisme d'entrecroisement des fils. Le principe est le suivant :

Une partie des bobines est échangée de droite à gauche et fait le tour du circuit, tandis que l'autre moitié le fait en sens inverse. Cette technique permet d'entrecroiser les fils un à un et de créer le motif simple de corde suivant :

Une petite vidéo pour se rendre compte du mouvement :
Il y a des motifs plus complexes en croisant un bobine sur deux, avec des sens différent etc. Le motif en vigueur actuellement pour tisser avec de la fibres de carbones ou de verre est le suivant :
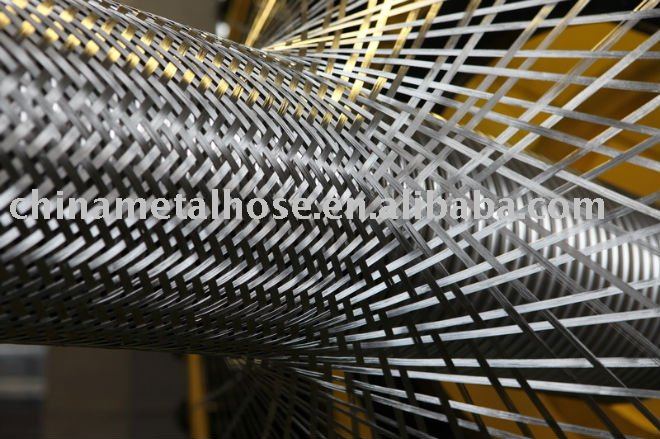
En fait c'est le motif le plus simple qui permet un enroulement autour de pièce (comme sur la photo) ce qui n'est pas possible avec le type d'enroulement croisé vu sur la première vidéo.
Voila pour le principe. Mon idée est d'en faire un en lego entièrement automatisé mécaniquement et avec un moteur uniquement. J'espère atteindre une vitesse de tissage correcte qui impressionnera en expo, l'ensemble des pièces mobiles est sympa à voir, peut être plus que mon précédent métier à tisser qui était relativement lent bien qu'il y ait plus de mécanise.
Passons au mécanisme. Je m'oriente vers un métier simple avec entrecroisement alternatif en sens inverse. C'est à dire la moitié des bobines qui vont en sens horaires et l'autre moitié dans le sens anti-horaire.
Sur cette image, vous pouvez voir le mécanisme de base pour une trois bobines :

Deux roues motorisées avec trois emplacements pour bobine tournent en sens inverse. Sur chaque extrémité, une tige est commandée à chaque fois que deux emplacements (trous) tombent en face, échangeant ainsi une bobine de droite à gauche et assurant ainsi le motif de tissage. Vous pouvez voir le principe sur cette vidéo d'un métier à tresser trois bobines manuel :
Il suffit alors d'augmenter le nombre de roue d'entrainement, les emplacements et les mécanisme d'échange des bobines. On arrive à ce schéma de principe avec un chemin de bobine en vert, et un chemin en bleu :


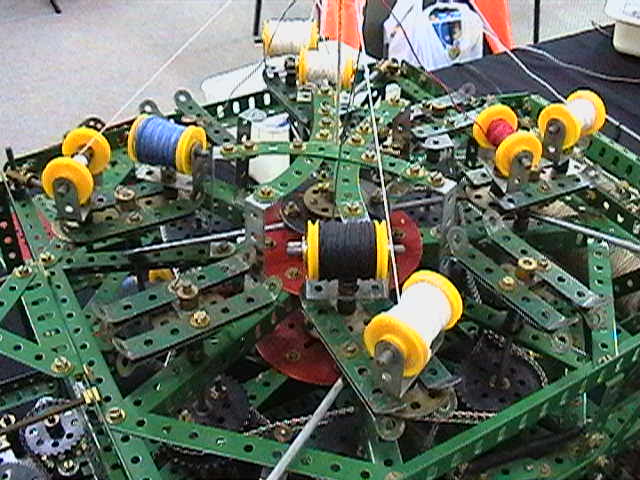
Au niveau des créations, il y en a très peu en lego, celle montrée en vidéo et une autre avec un NXT qui enlève l'aspect intéressant. En revanche, du coté des meccano, comme pour le métier à tisser, le métier à tresser a été repris des les années 1960 sur base d'un métier à tresser antique :

(trois bobines)

(huit bobine)
Les bobines sont échangées via des palettes rotatives et des mécanismes de tirette passent les bobines de droite à gauche. Hélas la documentation est faible, les photos peu nombreuse et je n'ai trouvé que cette vidéo :

Donc dans un premier temps, je me base sur ce principe d'échange par palette en modifiant les mécanismes de tirettes actionnés par un seul arbre mais par plusieurs dans mon cas. Voici la première version de test :


Les axes des palettes forment un octogone de coté 11L (un peu moins pour les cotés 45°). L’ajustement global ainsi que le châssis m'a pris beaucoup de temps. Je n'ai pas encore réussi à construire un octogone parfait mais je m'en approche :
Coté = 11L
Angle = 45°
Distance vertical est horizontale souhaitée exactes : 11/rac(2) = 8,48t
Je suis à 9t. Donc un octogone non parfait, heureusement j'ai du jeu de fonctionnement donc ça va.
L'ensemble des palettes est motorisé via deux systèmes de chaîne que l'on aperçoit ici :

Les mécanismes de tirette/poussoir qui font passer les bobines de palette à palette sont disposés en dessous et sont actionnés chacun par l'axe de rotation d'une palette :

Pour avoir une commande non linéaire des échangeurs, vous avez du voir que j'utilise la bonne vielle technique d'une bielle manivelle coulissante bloquée par des bushs. Le position de ces bush assurent la non linéarité et le coté impulsionnel du système.
Néanmoins, il y a plusieurs problèmes :
-le premier est que la commande de rotation des palettes et des échangeurs sont sur le même axes ce qui rend difficile le réglage (déphasage angulaire). Pour contrer ça, j'ai monté les palettes sur des axle joiner avec pin a friction. Ce qui veut dire que les palettes sont entraînées par friction et ne sont pas totalement solidaire de l'axe de rotation. C'est pratique pour le réglage et l'ajustement mais cela ce dérègle tout le temps des que ça force.
-le deuxième problème est l'absence de rail de sécurité sur les passages de bobine. Vous avez du remarquer sur les métier à tresser actuel que les bobines ne sont pas échangées via des palettes rotatives mais suivent des rails. L'avantage est qu'à haute vitesse, les bobines ne peuvent pas sortir de leur rails du à la force centrifuge, l’inconvénient est que lego c'est très dure à obtenir (en technic)
C'est pourquoi l'alternative semble pour l'instant de garder le système à palette et de le sécurité via des rails (en flex ou en liftarm). Concernant le premier point, je l'ai résolu sur le version deux en dissociant l'entrainement des palettes et l'entrainement des systèmes d'échanges via des engrenages qui permettent un réglage angulaire fin.
Voila pour le début, j'espère avoir été clair, je vous présenterais la version 2 demain et une vidéo dans les semaines qui viennent.
.gif ":)")























.gif ";)")