


Les systèmes de direction
|
C'est utile de réaliser un essieu directeur et moteur quand on a pas de roue...
|





|
Effectivement, un tank, c'est censé avoir des chenilles car il désigne un char au sens de l'armée. C'est marrant, je m'étais posé la question en lisant le dernier Tardi (ça parle de son père qui a été pilote de chars - et surtout prisonnier de guerre - pendant la 2ème). Sur roues, on préférera véhicule ou engin blindé. |

|
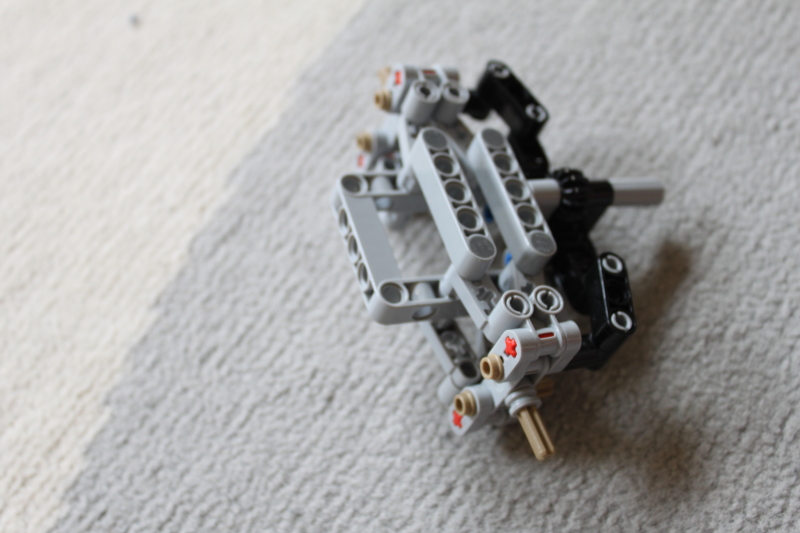
Je vous propose aujourd'hui un système de direction qui devrait intéresser les Moceurs construisant avec les roues d'Unimog ou Crawler.
Ce montage n'est pas vraiment fait pour les TT et autres 4x4 franchisseurs, mais plus pour des véhicules roulant sur du plat. Le voici :   Il est difficile de décrire son fonctionnement, mais avec ceci, vous disposez d'une transmission, d'une direction, le tout peut être concentré dans une largeur de 15L (Une roue Unimog fait 12L), ce qui n'est pas possible avec un système traditionnel (avec cardans, ou pire avec ponts portiques). Voici ses performances :  Voilà, telles que montées, les poutres 3*5 coudés vont décaler le centre de pivot des roues, les cardans restent tout de même dans des angles acceptable (<45°). Le plus dur a été de faire la direction. Impossible de passer plus au coeur de système, je suis passé au dessus. Je mets à disposition ce fichier SR3D ici. Maintenant, libre à vous de trouver de meilleurs solutions. .gif ";)") Je pense surtout à la direction en elle-même, vu que je me suis cassé la tête pendant 2 semaines sur toutes sortes de montages... Je pense surtout à la direction en elle-même, vu que je me suis cassé la tête pendant 2 semaines sur toutes sortes de montages...En tout cas, mon MOC va pas se priver de ce truc ! Dernière édition par Namine le Dim Aoû 18, 2013 9:21 pm, édité 1 fois au total.
Si vous avez du mal en calcul mental, il y a un moyen mnémotechnique tout simple :
1+2+60+12-6000000 n'est pas égal à 504. Voilà, vous pouvez maintenant effectuer des opérations arithmétiques complexes de tête. |

|
Ce qui est bien, c'est qu'il est possible de faire de petits passages de roues.
Tu ne peux pas remplacer le montage avec l'axle joiner par une poutre ? Ca serait plus solide. La théorie, c'est quand on sait tout et que rien ne fonctionne. La pratique, c'est quand tout fonctionne et que personne ne sait pourquoi.
|


|
Apparemment oui, le CV joint n'est pas collé au cardan quand les roues tournent.
La théorie, c'est quand on sait tout et que rien ne fonctionne. La pratique, c'est quand tout fonctionne et que personne ne sait pourquoi.
|
|
Trés intéressant, cela compense le pb du pivot de direction trop intérieur. Une nouvelle porte ouverte aux mocs
 Pour ceux qui n'utilisent pas de CAO tu peux mettre des images qui expliquent le système ? |





|
Anto : C'est le point à améliorer. C'est pour l'instant le seul montage valable que j'ai trouver, qui combine angle de braquage acceptable et parallélisme.
Alban et Xtof : Voici un coupe :    On voit bien l'avantage des poutres coudées, elles permettent de conserver une largeur impaire entière (19L entre les 2 roues), de déplacer les points de pivots, et de conserver malgré tout une transmission avec des CV joint.  Focus sur la direction. Si vous avez du mal en calcul mental, il y a un moyen mnémotechnique tout simple :
1+2+60+12-6000000 n'est pas égal à 504. Voilà, vous pouvez maintenant effectuer des opérations arithmétiques complexes de tête. |
|
Merci Guilliug, c'est ce genre de montage que je cherchais pour comparer. D'ailleurs, il doit bien y avoir des images ou une vidéo de ce genre sur le forum, mais je ne les trouve pas...
Je peux te dire que oui, ça transmet bien le couple, et ça ne saute pas entre le cardan et le CV. Un axe de 2.5L ne serait pas de refus quand même. Si vous avez du mal en calcul mental, il y a un moyen mnémotechnique tout simple :
1+2+60+12-6000000 n'est pas égal à 504. Voilà, vous pouvez maintenant effectuer des opérations arithmétiques complexes de tête. |
|
Quand tu parles de parallélisme, c'est quand les roues braquent ? Si elles ne sont pas parallèles il y aurait un effet Ackerman, ce qui améliorerait le système. Le système me rappelle celui du Team van RC topic7670.html. La théorie, c'est quand on sait tout et que rien ne fonctionne. La pratique, c'est quand tout fonctionne et que personne ne sait pourquoi.
|
|
J'ajouterais que le fait d'avoir un axe coulissant dans le cv joint n'est pas un point à améliorer, puisque ça fonctionne comme cela en réalité sur une voiture: joint coulissant côté BV, joint fixe côté roue.
Je vais partir la-dessus pour améliorer l'angle de braquage (dans la limite des cardans), et intégrer des supensions indépendantes. |
|
Bonjour, je compte faire le modèle B de la boite #8070 en RC. Pour la propulsion, j'ai l'intention de coupler deux moteurs L comme j'ai pu le voir sur d'autres sites anglophones.
Par contre, pour la direction, j'ai pu voir certain utiliser un moteur M (Sur le site Sheepo's Garage). Ma question est la suivante : Comment avec ce type de moteur, la direction se recentre-t-elle lorsque l'on lâche le bouton de la direction de la télécommande ? J'ai de forts doutes quant au recentrage automatique de la direction. Ne faudrait-il mieux pas que j'utilise le servomoteur pour cette fonction ? Merci pour vos réponses. Informatique, modélisme ferroviaire et enfin Légo.... bref, un emploi du temps chargé !
|


Retourner vers De la théorie à la pratique
Qui est en ligne ?
Utilisateurs parcourant actuellement ce forum : Aucun utilisateur inscrit et 2 invités