




J'ouvre ce topic pour vous présenter mon dernier moc en date
 .
.Avec les grosses roues de 94.8mm et le servomoteur du 9398 (pour lequel j'ai récemment craqué ^^), j'ai pu me lancer dans un projet que j'avais depuis longtemps: reproduire un chargeur un peu spécial de la marque française Mécalac.

En fait l'originalité de l'engin c'est son bras rotatif et ses quatre roues directrices
 .
.DESIGN
Objectif:
Reproduction la plus fidèle possible du chargeur, spécialement:
- Cinématique du basculement du godet en double-Z.
- 4 roues directrices avec le rayon de braquage le plus faible possible.
Toutes fonctions motorisées indépendamment.
Utilisation des moteurs L couplés aux vérins mécaniques pour tester le niveau de performance atteignable, pour comparer aux moteurs M.
Dimensions:
Longueur 42cm
Largeur 17cm
Hauteur 21cm




Caractéristiques:
On a donc 5 moteurs pour 5 fonctions:
- 1 moteur XL pour la propulsion aux 4 roues.
- 1 servo moteur pour la direction des 2 essieux.
- 2 moteurs L pour les vérins du bras.
- 1 moteur M pour la rotation de la turntable du bras.
Ces moteurs sont alimentés par une BB normale, via 3 récepteurs IR (logique
 ).
).
FONCTIONS
Propulsion:
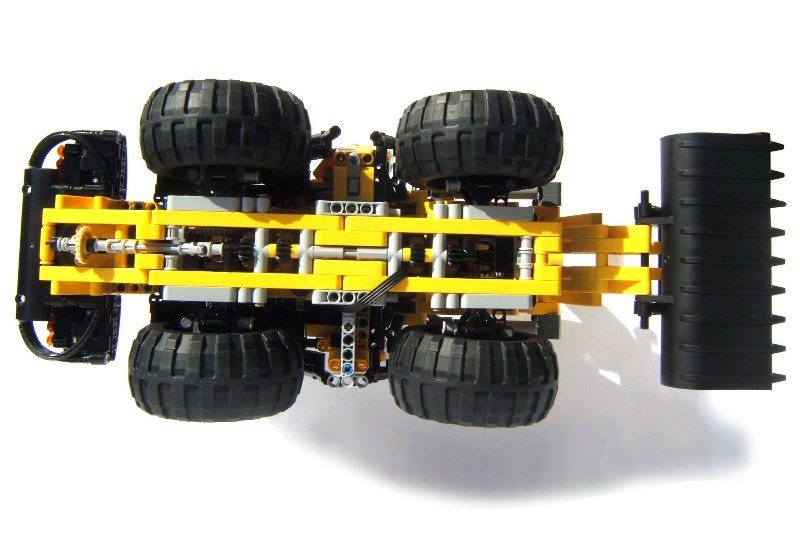
Elle est assurée par un moteur XL placé verticalement tout à l'arrière du chargeur. La transmission est assurée par en renvoi d'angle 12tsb-20tsb en sortie de moteur, puis deux cardans entraînent deux couples de 12t qui s'engrènent avec deux couples de 20t. Ensuite le couple est transmis au différentiel 28t de chaque essieu.
Le fait de mettre un couple d'engrenage à chaque fois permet d'éviter les craquements en répartissant le couple.
.gif ";)")
Au final, la vitesse de déplacement du chargeur est plutôt convenable.
Je regrette d'avoir du mettre le renvoi 12tsb-20tsb parce que c'est fragile et qu'il arrive que ça craque quand on fait vraiment forcer la propulsion
 . Mais c'est avant tout un problème d'espace pour placer le moteur XL, qui est dicté par les choix faits pour la direction comme je vais l'expliquer juste après...
. Mais c'est avant tout un problème d'espace pour placer le moteur XL, qui est dicté par les choix faits pour la direction comme je vais l'expliquer juste après...Direction:
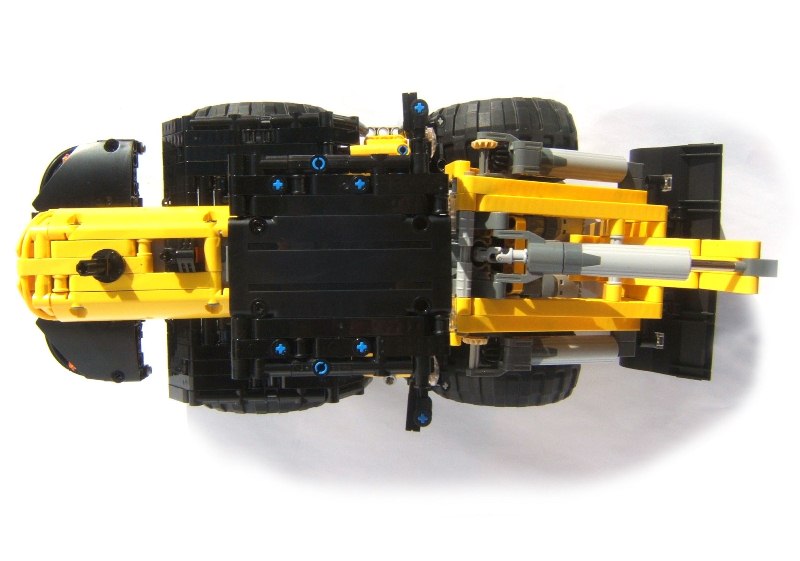
L'objectif principal est d'avoir un angle de braquage des roues le plus important possible. Ceci m'a contraint à limiter la largeur de châssis à 5 tenons sur toute la hauteur des roues. Et donc l'espace disponible s'en trouve fortement diminué. Ceci, couplé au fait que la majeure partie du capot arrière du chargeur accueille la BB, explique le placement pas top du XL de la propulsion.
On passe donc à la transmission de la direction. Le servomoteur est placé entre les deux essieux et un arbre part devant et derrière avec une 12t que entraîne directement deux crémaillères. Simple et très efficace !
.gif "8)")


L'autre souci entraîné par le châssis de 5 tenons de large est que j'ai été obligé de diminuer la garde au sol en faisant passer l'arbre de transmission de la propulsion sous le différentiel. Au final, je trouve que cela pénalise le design du chargeur, qui parait moins fin que l'original.

Rotation du bras:
La complexité de la transmission à mettre en place provient du fait qu'encore une fois, l'entrainement de la turntable doit se faire entre les roues, là où il y a peu d'espace. De plus il faut une réduction tout de même assez conséquente pour garantir une bonne précision.
Au final, la mécanique se résume à une réduction vsf-8t puis 12t-24t-Turntable.
Ça donne environ 4 secondes pour faire un demi tour, ça va bien !



Opérations du bras:
Compte tenu de la densité de mécanismes au dessus de l'essieu avant, il n'était pas envisageable de faire passer la transmission aux vérins à travers la turntable. J'ai donc choisi d'embarquer les 2 moteurs, en plus en ne faisant que des demis tours, on a aucun problème avec les fils.
Montée/Descente:
La levée du bras est réalisée par 2 vérins mécaniques entraînés par un moteur L via renvoi d'angle 12tsb-20tsb puis 12tsb-12t dans chaque vérin.

Renversement du godet:
Cela est réalisé par 1 seul vérin mécanique au lieu de 2 pour le modèle réel (pas la place...). Ce vérin est entraîné par un moteur L via un engrenage 16t-20t puis deux renvois d'angle 12t-12t et finalement un cardan. Un peu compliqué, mais j'ai pas trouvé plus compact.

J'ai reproduit la cinématique en double-Z du chargeur réel, du fait que pour le coup, il y avait largement la place.

Du à la longueur importante des vérins mécaniques, dans certaines positions, il se montre quand même un peu trop encombrant je trouve...
 Exemple ci-dessous:
Exemple ci-dessous:
Le godet conserve son inclinaison lors de la levée du bras.
Finalement, l'amplitude de mouvement est étudiée de manière à permettre de vider le godet quelle que soit la hauteur du bras.

Je suis plutôt content du résultat car grâce aux moteurs L, on obtient des vitesses de mouvements du bras assez importantes pour garantir une bonne jouabilité.
Le seul souci, c'est que la place prise par les deux moteurs L oblige à faire un bras un peu plus haut que sur le modèle réel. Ce que j'ai compensé en élevant également légèrement la cabine. Donc au final le chargeur est un peu plus haut, ça reste raisonnable je trouve...
Plus de photos dans ma galerie BrickShelf: http://www.brickshelf.com/cgi-bin/gallery.cgi?f=515368
VIDEO
CONCLUSION
Vous l'avez compris la difficulté principale est du au fait que des grosses roues qui braquent beaucoup, ça prend de la place
. A première vue, je pensais l'absence d'articulation centrale me permettrait de gagner de la place mais en fait c'est plutôt le contraire... Finalement je pense avoir remplit mes objectifs et le résultat est satisfaisant au niveau de la jouabilité et de la ressemblance avec le modèle réel.
Voilà, et vous dites moi ce que vous en pensez ! Je suis bien sûr ouvert à tous commentaire ou critique !

















 Et que c'est beau!
Et que c'est beau!

.gif ":)") , pour ton vérin supérieur il y a les nouveaux vérins sur le 8069.
, pour ton vérin supérieur il y a les nouveaux vérins sur le 8069.












