Nico71 avait, il y a quelque temps, commencer un rover lunaire:
http://www.techlug.fr/Forum/topic5290.html
Sujet intéressant et je me suis donc attelé, moi aussi, à cette tâche.
Voici le résultat de mes réflexions:
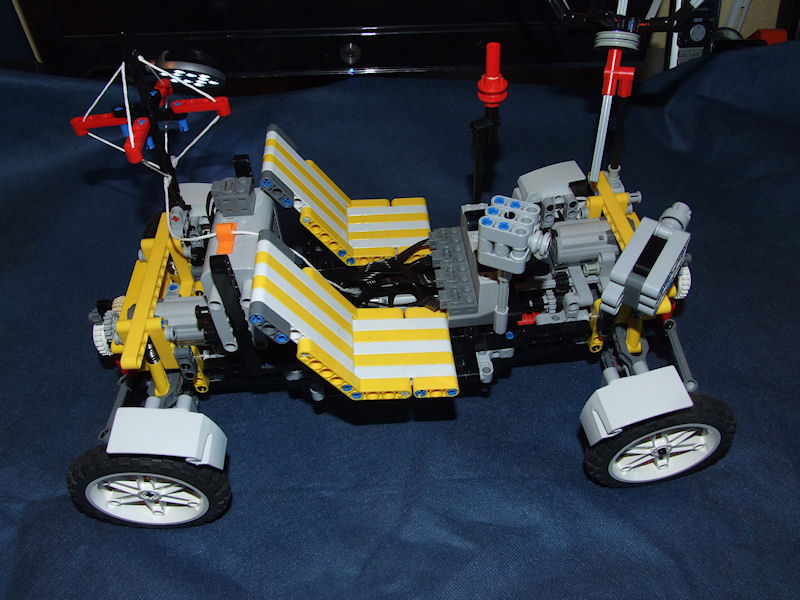
Il a 2 moteurs par essieux: 1 moteur M pour la propulsion, 1 moteur M pour la direction.
Suspension sur chaque roue, indépendante.
Les dimensions:
- longueur=37 cm (3,10 m)
- empattement=27 cm (2,3 m)
- largeur=19 cm (1,8 m)
- garde au sol=3 cm (0,35 m)
- hauteur=15 cm (1,14 m)
- diamètre roues=8 cm (0,81 m)
Comme on le voit, c'est pratiquement du 1/10.
La transmission se fait via une boite à 2 vitesses + point mort.
Une vitesse rapide pour la plaine et une pour la grimpette.

Le point mort permet de choisir soit:
- traction avant
- propulsion arrière
- 4 roues motrices
comme le véritable rover.
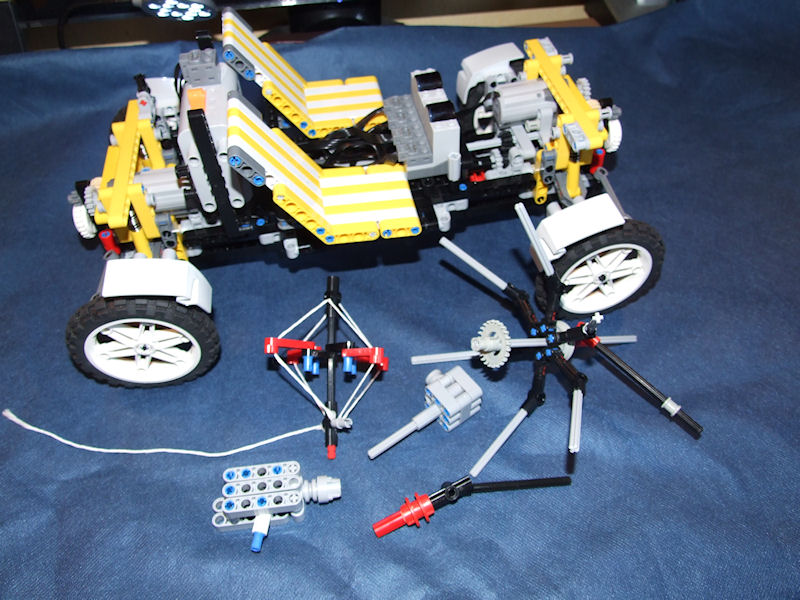
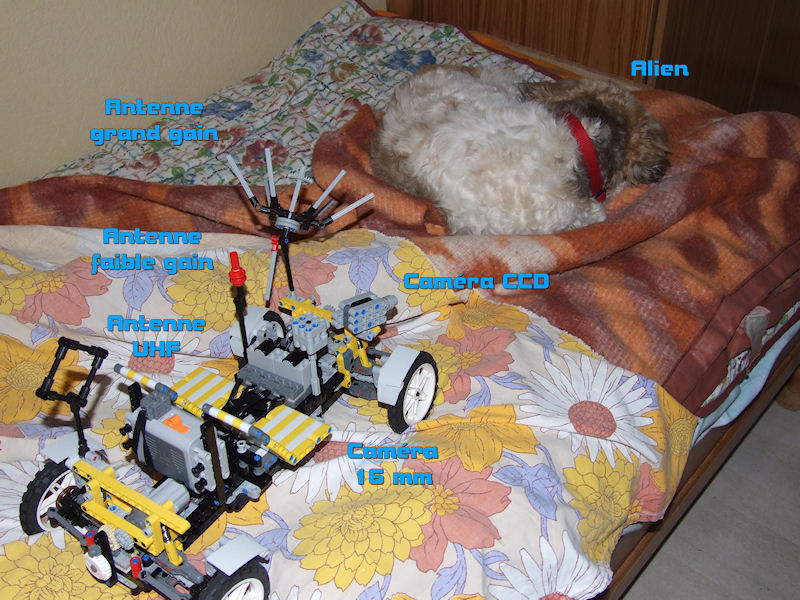
Le voici avec ses accessoires démontés.
Les accessoires sont:
- la caméra CCD
- la camera 16mm (Hasselblad)
- La parabole de communication avec la terre (grand gain (parapluie))
- L'antenne faible gain (cylindrique rouge)
- L'antenne UHF (polyèdre)
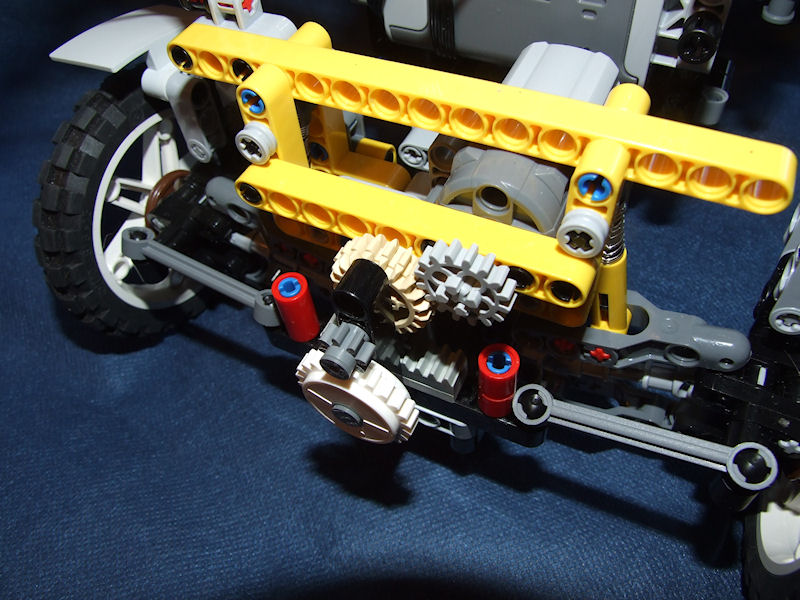
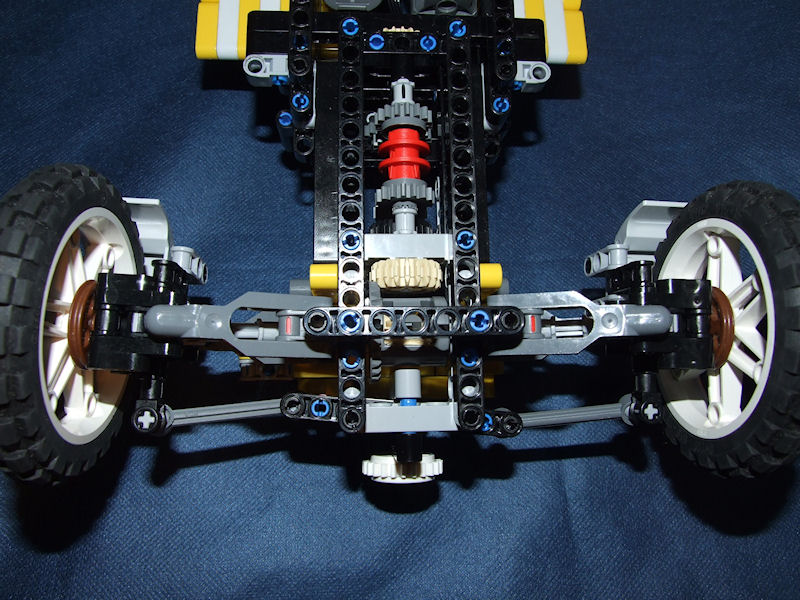
L'essieu arrière.
Les 2 essieux sont strictement identiques.
Le vrai rover en essai dans le Nevada

Bientôt une petite vidéo.
.gif ";)")










 je viens effectivement de voir que tes photos sont en png donc pas de perte de qualité en théorie.
je viens effectivement de voir que tes photos sont en png donc pas de perte de qualité en théorie.