





Voici une vidéo d'un essai :
Et quelques photos :

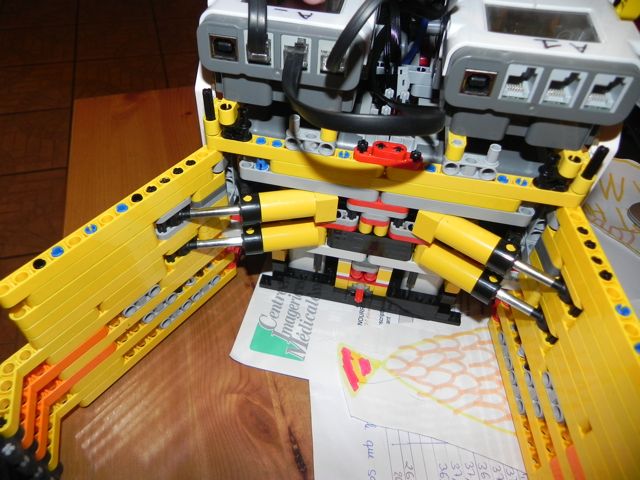


La grosse difficulté pour nos LEGO est de déplacer les pions qui pèsent environ 400 grammes. Pour compléter il y a des rois et reines (le thème est les échecs) qui pèsent 300 grammes de plus et certains robots pourront fabriquer des tours de 1 ou 2 pions surmontés d'un roi ou d'une reine.
Nous avons le droit de les soulever mais je ne vois pas bien comment faire une structure assez rigide pour les prendre (diamètre 20cm). Déplacer de tels pions demande une forte adhérence au sol que nous avons obtenus avec un robot lourd et un choix du bon diamètre de roue pour avoir assez de couple et de vitesse.
Cette mécanique est le fruit de nombreux essais sur des bases 2 ou 4 roues motrices et avec 2 ou 4 moteurs NXT. Au final le robot n'a que 2 roues motrices qui sont judicieusement placées au plus près de la pince.
La partie mécanique est bien avancée, la base roulante ne devrait plus changer
.gif ":)")
Le bras est pneumatique et il reste un problème car le compresseur actuel ne fournit pas assez d'air ni de pression. Buz a pour mission de nous faire un compresseur plus puissant.
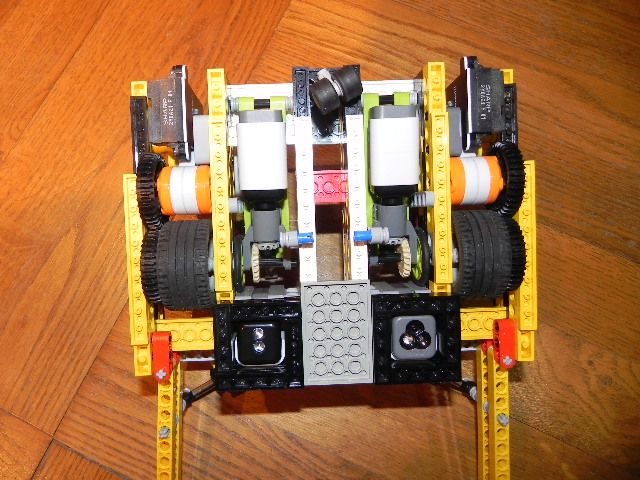
Voici quelques photos qui montrent la base roulante pendant la construction, il y a 2 moteurs, 2 capteurs de rotation, 2 capteurs de distance et 2 capteurs de lumière dans ces quelques tenons carrés :





Les commentaires souvent entendus laissent à penser qu'un robot simple qui marque quelques points à chaque manche marquera à la fin beaucoup plus de points qu'un robot complexe sensé faire des matchs exceptionnels. Pour cette raison notre robot n'utilise qu'un seul NXT. Il est aussi petit car il risquera moins de percuter des obstacles (expérience de l'an dernier). Par contre le poids des pions nous oblige à avoir un robot lourd, il pèse actuellement 2,7Kg.
Nous utilisons beaucoup de capteurs (12 au total) qui sont reliés au NXT via des multiplexeurs. Se pose alors le problème de lire les valeurs de tous ces capteurs : Cela prend du temps. En effet la lecture d'un encodeur prend 7 millisecondes. Mais les 12 capteurs à travers les multiplexeurs... dans le pire des cas notre fréquence de lecture est de 12 Hz ce qui est beaucoup trop pour se déplacer avec précision (le robot aurait parcouru 2cm entre 2 lectures).
Thibaud travaille d'arrache pied sur les drivers afin d'améliorer ces temps de lecture et c'est en bonne voie.
Le compresseur est alimenté par un boîtier à piles Pfs, les multiplexeurs ont aussi leur BB. Le second NXT ne sert que de lest et embarque aussi 6 piles. Au total il y a 24 piles/accus R6 dans le robot.
Autant que possible nous essayons de garder un robot simple et fiable. Seuls les capteurs sont nombreux, mais c'est pour la bonne cause :
- Le robot peut voir les cases au sol et se repérer régulièrement
- Les codeurs sur roues libres permettent de détecter un patinage du robot. C'est indispensable vu les obstacles "mobiles" qu'il peut y avoir sur la piste.
- Le robot peut voir sur les côtés jusqu'à 80cm s'il y a des pions et choisir en fonction ce qu'il fera.
- Reste les obligations du réglement : capteurs Ultrasons pour détecter l'adversaire et bouton d'arrêt d'urgence servant aussi au démarrage.













 :
:











.gif ";)")



