J'ai débuté avec un moteur M par pied en essayant de garder l'équilibre

Avec des pieds un peu gros il marchais
 mais impossible de tourner (de plus la BB était externe pour limiter le poid).
mais impossible de tourner (de plus la BB était externe pour limiter le poid).Pour améliorer la stabilités je suis revenu aux pieds chenillés
 , puis progressivement j'ai ajouté des fonctions...
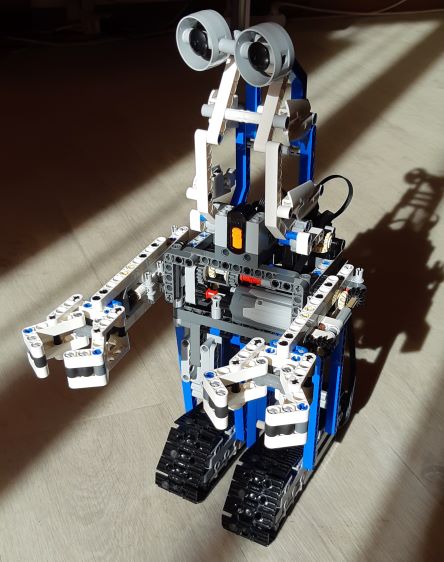
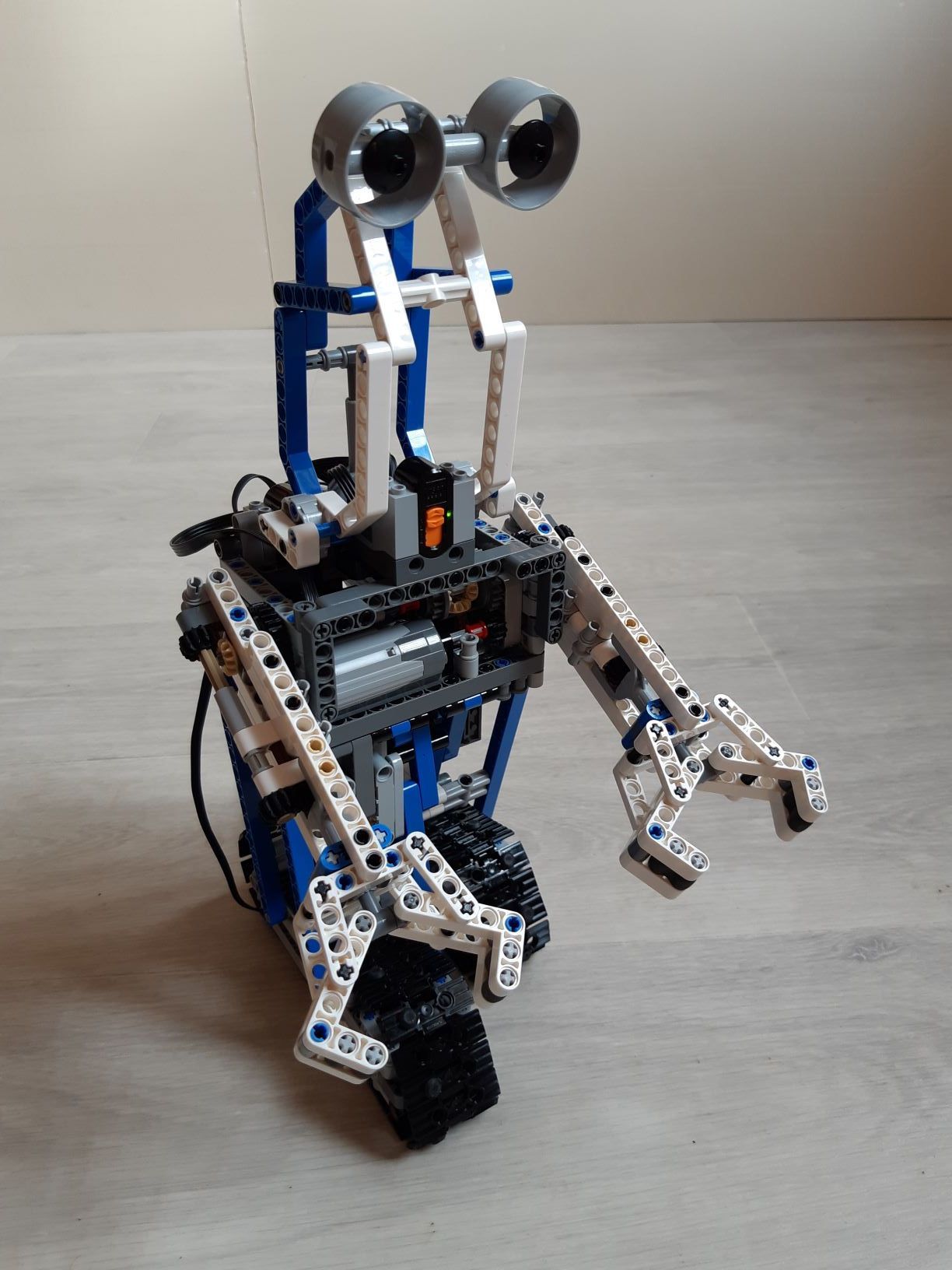
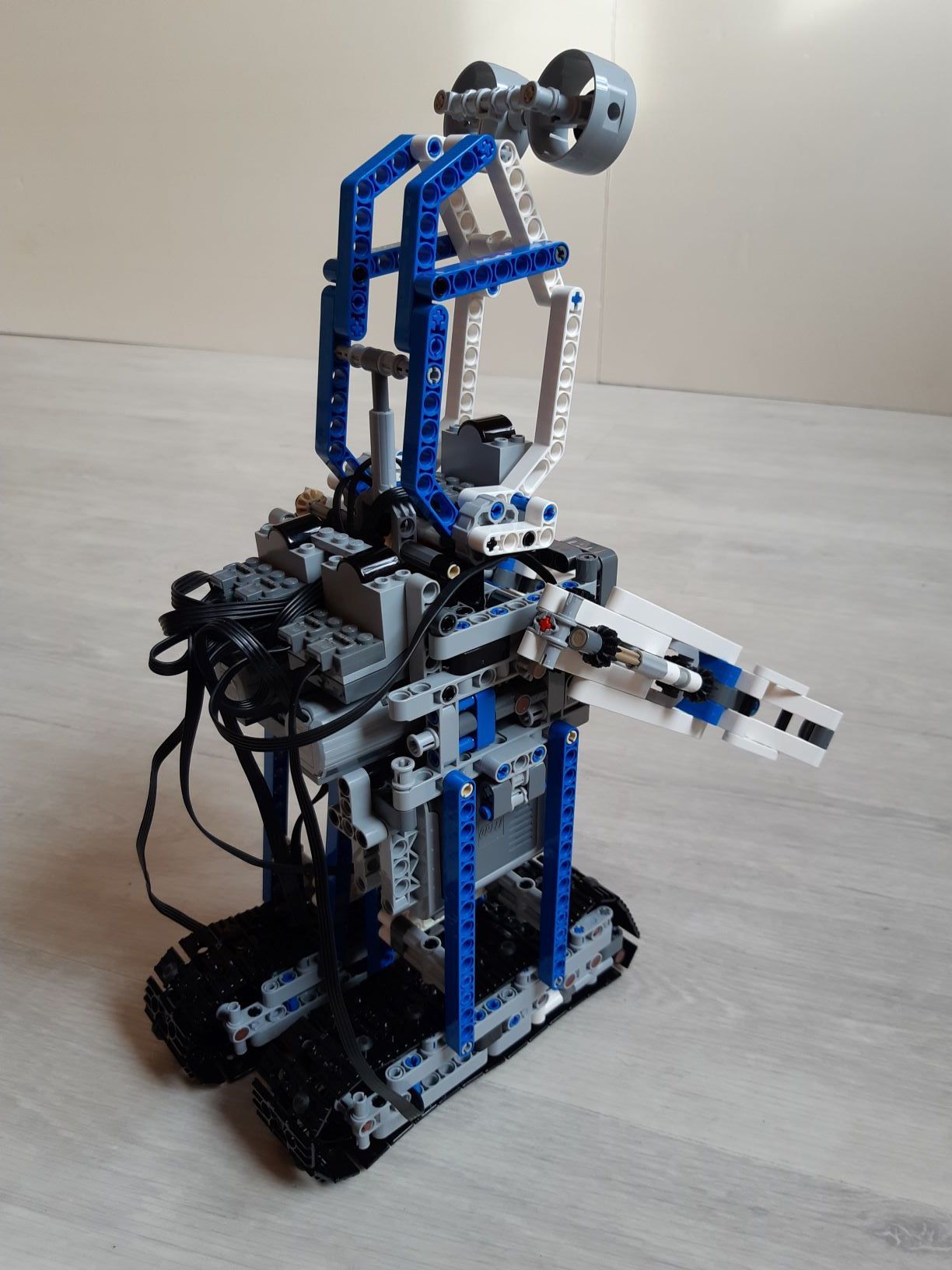
, puis progressivement j'ai ajouté des fonctions...Voici l'état actuel : un moteur M par chenille, un par bras, un pour les deux pinces et le dernier ... (a voir en vidéo)
Bon je l'avoue, il est moche et ne ressemble à rien (et si : à un robot) mais il marche.
Une petite vidéo en prime
.gif ";)")
Si vous connaissez des vrais robots marcheurs je suis interressé.

 !
!