

Voici mon premier MOC basé sur le set NXT 8527. Pour la petite histoire, je suis plutôt fan de SF, et de Supreme Commander (pour ceux qui ne connaissent pas, c'est un jeu de stratégie). Le but de ce projet est de faire une ébauche pour reproduire ces robots de combat. L'une des factions, les Cybrans, ont un look plutôt "insectoïde", ce qui sera plus facile que de se lancer dans un bipède (surtout pour un premier projet, mais ça viendra).
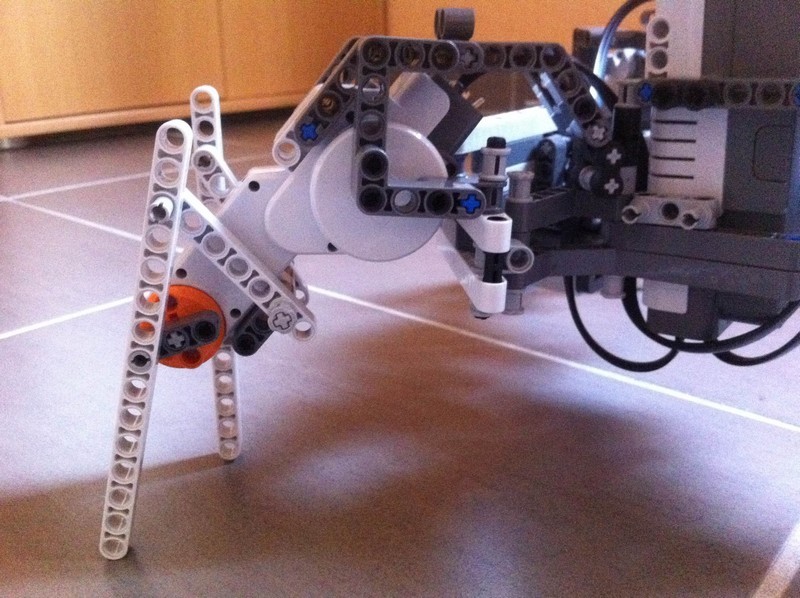
Rien de bien technique dans ce premier modèle. Disposant de 3 moteurs, je suis parti sur un "hexapode" réparties 3 paires de pattes, dont le mécanisme est inspiré de ce que j'ai pu voir sur le net. La disposition des "paire de pattes" a été dictée par la stabilité du robot. Place aux premières photos (vous pouvez cliquez sur celles-ci pour les agrandir) :

3 vue pour mieux voir (face / profil / dos) :



Dans un premier temps, il me manque à solidifier le châssis et surtout la liaison des pattes avant (déjà fait pour la paire arrière). Ensuite, je compte lui ajouter quelques capteurs, un petit programme sympa et pour finir j'essayerai de l'habiller un peu pour améliorer son look avec les maigres moyens dont je dispose. Et ne vous inquiétez pas vous aurez aussi droit à une vidéo !
Vos remarques sont les bienvenues, et merci de votre indulgence.
Gypaetus







.gif ":)")



.gif ";)")

 ).
).

