






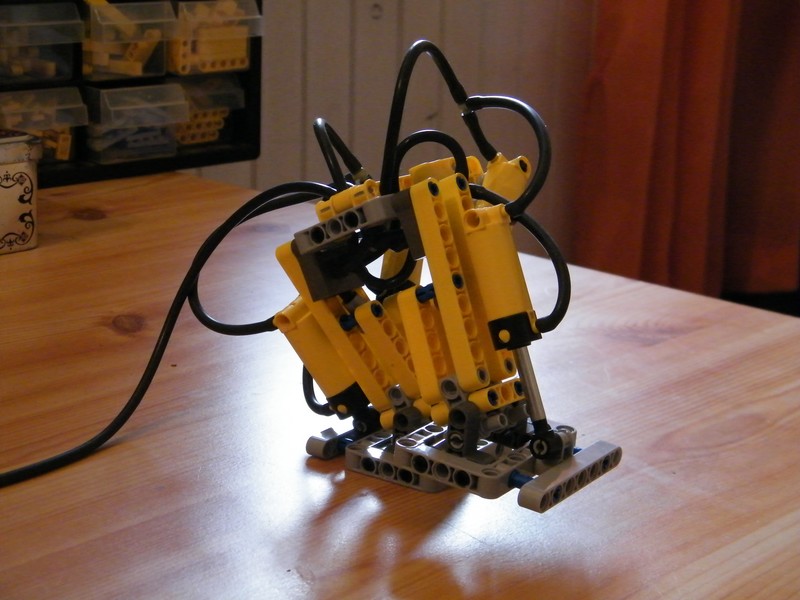

Les switchs sont logés dans chaque jambe. Chaque switch commande la jambe d'à coté ainsi que le pied. Ainsi lorsque une jambe à finit sa course, elle actionne l'autre, et quand l'autre à finit sa course, elle actionne la première et ainsi de suite tant qu'on pompe ^^

C'est une des applications possible pour le double inverseur pneumatique, on crée ainsi un mouvement sequentiel. On peut crée des choses plus compliquées avec comme de la logique combinatoire.
La séquence de mouvement est la suivante :
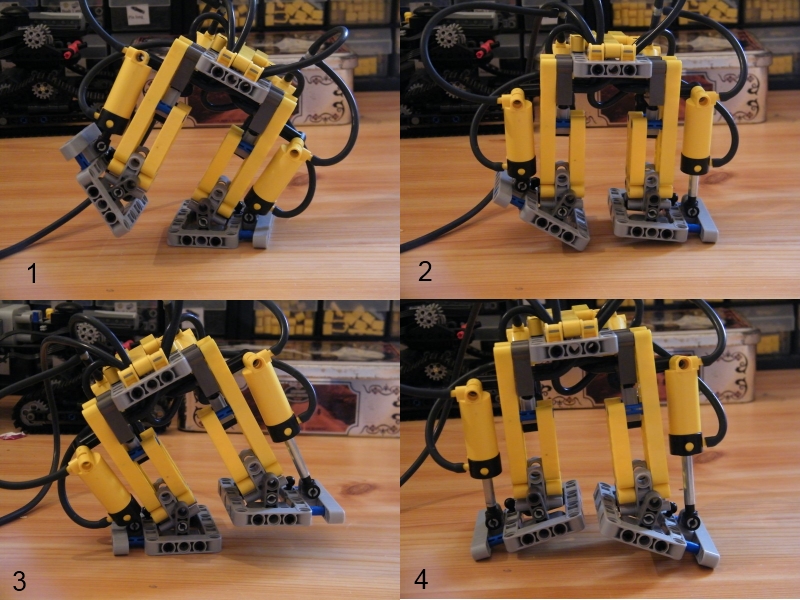
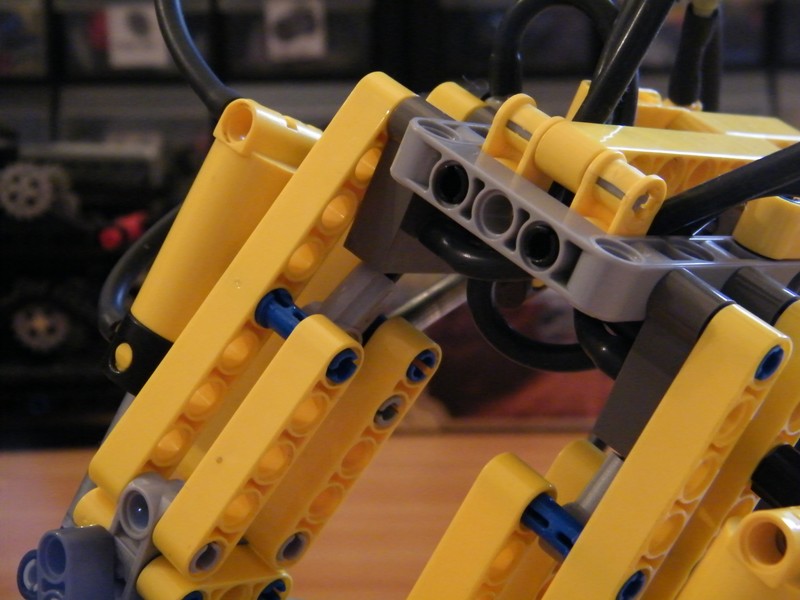
Le principal inconvénient est que les vérins d'un coté s'actionnent en même temps, ce qui fait que le changement de pied s'effectue un peu brutalement. On pourrait rajouter un double inverseur pour contrôler séparément les pieds mais j'ai choisi la simplicité en jouant sur le choix des vérins et la longueur des tuyaux. En choisissant des vérins souples pour les pattes, j'évite le basculement trop rapide des pieds et en augmentant la longueur des tuyaux pour aller aux pieds, je réduis encore ce temps en créant une latence pour que le marcheur soit stable.
Je vais le fiabiliser et ferais une vidéo
.gif ":)")


 .
.







 Sans le PFS , naturellement !
Sans le PFS , naturellement !




.gif ";)")









 !!!). J'essaye moi même de faire un robot (nxt) bipède. J'ai cru comprendre que tu n'aimais pas les vérins mécaniques => je vois que ce moc est que en pneumatique, et n'as tu pas eu de problème avec leur précision ? T'es tu arrangé pour n'utiliser les vérins que soit complètement ouvert soit complètement fermé ? Tu peut me répondre sur ce topic :
!!!). J'essaye moi même de faire un robot (nxt) bipède. J'ai cru comprendre que tu n'aimais pas les vérins mécaniques => je vois que ce moc est que en pneumatique, et n'as tu pas eu de problème avec leur précision ? T'es tu arrangé pour n'utiliser les vérins que soit complètement ouvert soit complètement fermé ? Tu peut me répondre sur ce topic : 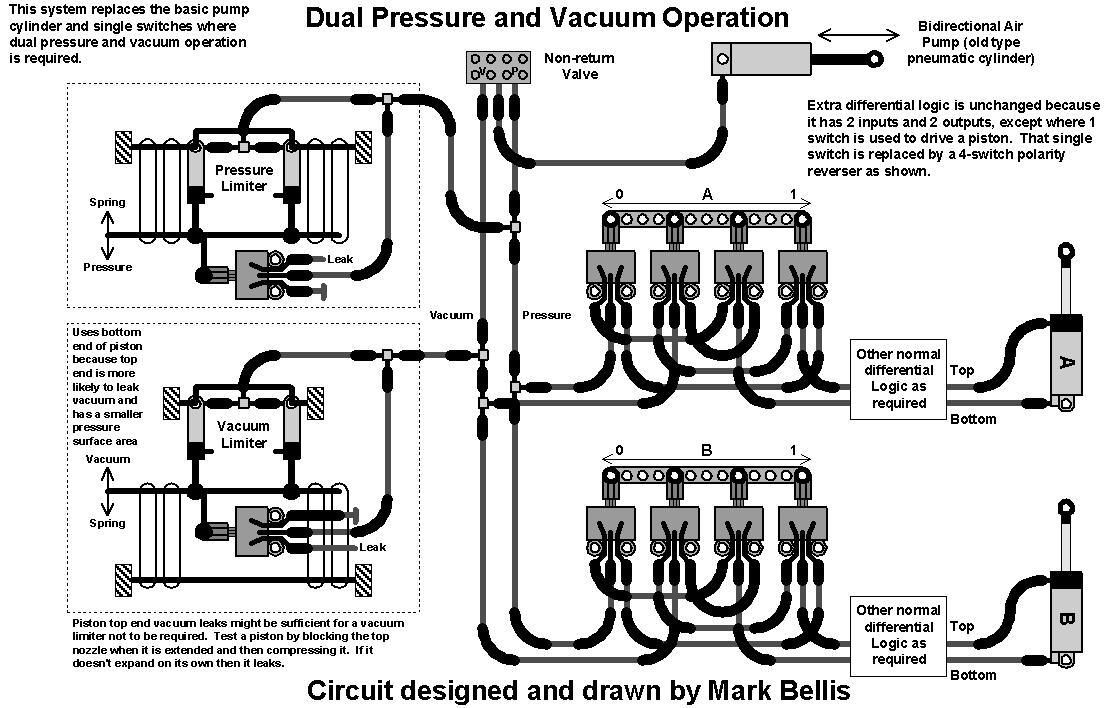{kind=link}