


chapeau philippe!
Une question reste en suspends : Et avec plus de poids? J'ai peur que même avec 6 roues les moteurs peinent un peu non? Il ne vaudrait pas mieux une base sur chenille justement pour se rapprocher d'un mobile type grue?
Pour la synchronisation c'est une bonne idée d'ajouter les capteurs pour la position des roues
Mon futur robot
|
Je suis d'accords avec les chenilles.
En plus le look va être d'enfers. Riki Power
Mon site : http://sites.google.com/site/rikimoc/ Mon picasa : http://picasaweb.google.ca/118334653719718745230 |


|
Le problème des chenilles est la tension aprés, pas assez et ça saute, trop et ça force. Tout ca décuplé par le poids.
Mais au moins, avec les chenilles, il y a un rail de roulette qui supporte tout le poids, et l'entrainement par le barbotin n'est pas contraint par le poids. |






|
Je suis aussi contre les chenilles qui risquent de se déboîter sur un sol adhérant dans les virages. Mais c'est clair que le look wall-e des chenilles rendrait bien !
Bon j'ai réfléchi à ton idée et je te propose une solution qui nécessite 1 nxt et 2 moteurs nxt + 1 irlink + 1 système PFs avec 2XL, un bb, un récepteur IR pour la base. Je pense que pour la télécommande tu en fera une commune à tout le robot, c'est une autre histoire mais sache qu'avec l'ir link le nxt peut piloter tous les PFS + le RCX. Voici la base qui a les mêmes possibilités que le moc de la vidéo :  Il faut un moteur XL par essieu, équippé d'un différentiel. Il faut un moteur de nxt (ou un moteur + capteur de rotation) pour les 2 roues directrices d'un même côté. La roue avant D fait le même mouvement que la roue arrière D mais à l'opposé. Voici le fonctionnement, ligne droite : toutes les roues droites et les 2 moteurs à 100% :  Tourner sur soi même : Roues D tournées à 45°, roues G à -45°, moteur G à 100%, moteur D à -100% 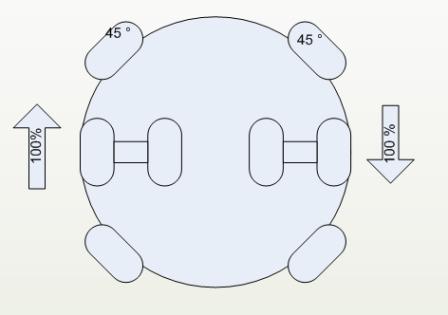 Virage : Roues D tournées à -19°, roues G à -45°, moteur G à 100%, moteur D à -40% (direction avec ackermann + conduite différentiel, s'il ne tourne pas avec ça...)  Donc on a 8 roues, dont 4 motrices sans direction et 4 directices. Cela simplifie la mécanique .gif ";)") Les roues directrices pourraient presque être laissées libres (roue folle) mais avec le poids je suis pas sur... |



|
Excellent! Génial! Dès mon premier instant de libre, j'attaque la construction d'une telle plate forme. A+
Roboleo " Je ne cherche pas, je trouve…" P. Picasso |


|
Merci Alban pour la confirmation, j'avais pas pensé à doubler les roues les plus à l'extérieur. C'est sûr qu'il va falloir un diff.
je vais essayé avec ses roues : en les doublant ou en les triplant selon mon stock.  l'avantage c'est qu'il est facile de mettre des chenilles par dessus.
Effectivement je vais aussi tester. Tu les as trouvé ou c'est schéma ? A + "Ce qui se conçoit bien s’énonce clairement et les mots pour le dire viennent aisément..." Nicolas Boileau-Despreaux
Mon blog = http://semtou.skyrock.com/ Ma galerie photos = http://www.brickshelf.com/cgi-bin/gallery.cgi?m=SEMTOU |


|
Pour les roues folles, il suffirait en théorie de centrer le centre de gravité au-dessus des roues motrices: l'adhérence est augmentée et le poids que les roues "jockey" doivent supporter est bien plus faible. Mais la masse des bras du robot lorsqu'ils sont placés les deux ensemble en avant ou en arrière ne risquerait-il pas de faire basculer le MOC ?
Il faudrait avoir une longueur de base de un mètre au moins ou alors avoir un tronc moins haut... à voir  |



|
PG52 je prend quelques mesures et je vous tien au courant.
Je pense que je vais faire passé tout ce que j'ai mis dans le dos beaucoup plus bas pour abaisser le centre de gravité. "Ce qui se conçoit bien s’énonce clairement et les mots pour le dire viennent aisément..." Nicolas Boileau-Despreaux
Mon blog = http://semtou.skyrock.com/ Ma galerie photos = http://www.brickshelf.com/cgi-bin/gallery.cgi?m=SEMTOU |
|
Fait gaffe à l'orthographe  --> Tu les as trouvés où ces schémas ? --> Tu les as trouvés où ces schémas ?Les roues directrices pourraient presque être laissées libres (roue folle) --> C'est moi qui ai écrit ça  Pour les schémas : C'est moi  qui les ai dessiné au boulot avec Visio, si tu veux une meilleure résolution par mail ? Visio donne l'angle des objets ce qui est bien pratique, ainsi que la longueur des traits bien pratique aussi pour mesurer. qui les ai dessiné au boulot avec Visio, si tu veux une meilleure résolution par mail ? Visio donne l'angle des objets ce qui est bien pratique, ainsi que la longueur des traits bien pratique aussi pour mesurer.Pour les roues motrices je verrai bien les 24x43 (4 roues au total) et pour les directrices des roues 20x30 (4 au total) par exemple ou des pneus "ballons". |
|
 scuse fatigué je crois, je passe la journée sur mon pc pour préparer des cours que je donne dans 15 jours et c'est sur setechnic que je viens me détendre quelques minutes en attendant le soir pour monter dans mon grenier légoter un peu. scuse fatigué je crois, je passe la journée sur mon pc pour préparer des cours que je donne dans 15 jours et c'est sur setechnic que je viens me détendre quelques minutes en attendant le soir pour monter dans mon grenier légoter un peu.Visio c'est un logiciel libre ? parce que ça m'intéresse effectivement si on peut avoir des angles et des mesures... Merci Alban J'ai monté 2 modules de roues pour le moment avec les grandes roues qui se comporte déjà mieux que les grosses roues du 4x4 trop molles. "Ce qui se conçoit bien s’énonce clairement et les mots pour le dire viennent aisément..." Nicolas Boileau-Despreaux
Mon blog = http://semtou.skyrock.com/ Ma galerie photos = http://www.brickshelf.com/cgi-bin/gallery.cgi?m=SEMTOU |
|
Non visio c'est microsoft, payant à plein poumons et orienté shémas d'entreprise (organigrammes, ...)
Mais tu dois trouver des logiciels de CAO gratuits, je crois que google en fait un (sketchup). |
|
Comme promis j'ai pris quelques mesures et le charriot tel que je l'ai conçu au départ et beaucoup trop grand :  J'ai donc drôlement réduit les valeurs et surtout renforcé le cadre. Voici quelques photos : Ne vous accroché pas au détail du cadre rouge (il est très mal fait) c'est du proto pour tester la charge que peuvent recevoir les modules de roues. Voici les anciens modules avec les grosses roues qui s'écrasent :  Voici les nouveaux qui tiennent mieux le choc :  Voici le montage des chenilles en cas de surcharge :  Et pour finir le test avec 5 kilos sur la partie avant :  je voulais avant de poursuivre m'assurer que les modules moteurs pourrait tourner et surtout qu'avec la charge de 10 kilos (LEGOSIMO Complet) les roues ne s'écraseraient pas trop. Voila bientôt la vidéo pour constater qu'avec seulement deux roues motrices ça se déplace bien et que le cadre ne se déforme plus. A + "Ce qui se conçoit bien s’énonce clairement et les mots pour le dire viennent aisément..." Nicolas Boileau-Despreaux
Mon blog = http://semtou.skyrock.com/ Ma galerie photos = http://www.brickshelf.com/cgi-bin/gallery.cgi?m=SEMTOU |

 Je connais c'est super et gratuit .
Je connais c'est super et gratuit .
|
La grosse roue à l'arrière me fait penser à la Batmobile des derniers Batman du grand écran !!
Par contre, je doute quant à la tenue des chenilles sur de simples pneus, quels qu'ils soient, car elles ne sont pas retenues en cas de virage et risquent de "ripper" (glisser). |


Retourner vers Vos MOCs Technic
Qui est en ligne ?
Utilisateurs parcourant actuellement ce forum : Aucun utilisateur inscrit et 26 invités