



Hélico
|
Salut Flo ! Je viens de tomber sur ton MOC et je le trouve super balèse ! Chapeau bas
 ! !Par contre, ce qui me ferait triper, ce serait une vidéo où, le manche à balais étant bloqué dans une position donnée, on verrait le pas des pales varier cycliquement lors de leur rotation  : pour cela il faut au moins être deux, mais en allant lentement et en suivant une pale ce devrait être possible. Ce serait une très bonne illustration de la commande de pas cyclique. Mais en fait ce que j'aimerais bien c'est voir ton MOC fonctionner en vrai : pour cela il faut au moins être deux, mais en allant lentement et en suivant une pale ce devrait être possible. Ce serait une très bonne illustration de la commande de pas cyclique. Mais en fait ce que j'aimerais bien c'est voir ton MOC fonctionner en vrai  car la vidéo ne lui rend que très partiellement hommage. car la vidéo ne lui rend que très partiellement hommage.Encore merci  et bravo pour cette superbe réalisation, et surtout je t'en conjure, ne fais pas comme Nico: NE LA DEMONTE PAS et bravo pour cette superbe réalisation, et surtout je t'en conjure, ne fais pas comme Nico: NE LA DEMONTE PAS  ! ! |









|
Ca va viendre la review, ça va viendre!
Bon, je voulais faire des modifs, mais je vais laisser tomber, je vais être juste en pièces, donc, tant pis, il gardera son aspect "hélico RC". Pour la vidéo, même problème que la dernière fois, le reflex ne fait pas de vidéo, donc, je tacherai de faire çà quand j'aurais un petit compact sous le coude (que je taxe celui des parents quoi!) Flo |









|
Bon, vu le temps entre le dernier message et aujourd'hui, je vous laisse deviner que les mioches ne m'ont pas laissé faire!
Allez, la review: Tout d'abord, le but recherché: à la base, reproduire les commandes de vol d'un hélico, puis rapidement, un hélico correct. Du coup, au niveau design, je me suis orienté sur un petit hélico, style Djinn, Alouette, Robinson ... mais monoplace. En effet, les commandes de vols mises au point sont relativement encombrantes, et la construction d'un hélico plus conséquent engendrerait des dimensions trop importantes pour la bonne tenue des pièces (bah oui, c'est fragile mine de rien). Au final, l'hélico mesure 85 cm au total (disque de rotor compris), et le rotor a un diamètre de 74 cm. Certains hurleront, mais l'engin est équipé d'armement (amovible), je détaillerai plus loin pourquoi.   Au niveau construction, c'est du pur studless. Pas d'autre choix pour obtenir une construction compacte et solide. Par contre, inconvénient, c'est plus 'souple' que du studfull sur de longues sections, et ça se voit au niveau de la poutre de queue, relativement fragile et sujette a flexion, du fait de sa longueur. Quelques panels complètent le design. Les fonctions proposées sont limitées en nombre, mais occupent pas mal d'espace : -Pas cyclique, commandé par le manche à balai, et agissant sur l'inclinaison de chaque pale, -Pas collectif, commandé par le levier a gauche du siège, et agissant sur l'ensemble des pales, -Anticouple, commandé par le palonnier, et transmis au rotor arrière par câble, -Transmission, avec rapport 1/3 entre le rotor principal et l'anticouple, et même rapport entre le principal et la turbine fictive (la turbine peut être remplacée par un moteur M) L'ensemble des commandes se fait depuis la cabine, ce qui pose le problème de la place occupée, qui doit être le plus limitée possible, afin de ne pas avoir un siège trop haut perché, ou une cabine trop au ras du sol. De l'ensemble des fonctions, c'est bien sur la commande du rotor principal qui est la plus complexe: La difficulté réside dans le fait de combiner des mouvements indépendants pour le pas cyclique (le plateau doit pouvoir s'incliner en tout sens), et un mouvement global pour le pas collectif (le plateau doit pouvoir monter et descendre, tout en autorisant les mouvements cycliques). Cette combinaison de fonctions est obtenue par un jeu de bielles (mouvements cycliques), dont les points de pivot peuvent se déplacer (collectif) Enfin, pour que le plateau cyclique soit toujours en alignement avec le rotor, il est nécessaire de mettre en place un compas d'entrainement. Sans lui, par le jeu des bielles, le plateau se décalerait en rotation par rapport a la tête de rotor.  Deuxième grosse difficulté, l'anticouple: il s'agit, sur un faible encombrement, d'obtenir un mouvement de translation associé a un mouvement de rotation. N'ayant a ma disposition qu'un seul plateau cyclique, il a fallu trouver une autre solution. Je me suis donc orienté sur le curseur faisant glisser un tube crénelé, commandant lui même l'inclinaison des pales.  Je remets la vidéo montrant le fonctionnement de l'ensemble: Enfin, dernière difficulté que je n'avais jamais rencontrée auparavant, l'équilibrage de tout ça... Et c'est la qu'interviennent les points d'emport et l'armement. En effet, après différentes modifications, dont l'allongement de la queue et l'augmentation du diamètre du rotor, l'équilibrage n'était plus du tout satisfaisant; et l'hélico avait une fâcheuse tendance à basculer en arrière.... Après modification de la cabine, il fallait encore ajouter du poids, d'où la mise en place de deux ailerons, équipé pour un avec un minigun, pour l'autre avec un spot. Avec ça, le problème de centrage est quasiment résolu. Les points d'emport sont facilement démontables, permettant de ré obtenir un hélico classique en quelques secondes.  Et enfin, la cabine en version définitive, dont la console a été modifiée afin d'alourdir l'avant de l'hélico au maximum. Malgré sa structure légère, elle est relativement rigide. Des panels sont mis en place, permettant un peu plus de réalisme que la version précédente.  Points Forts / Points Faibles: Bien sûr, en point fort, la reproduction des commandes de vols, sans modifier de pièces. Pas facile du tout à mettre au point, mais tellement plaisant a regarder! En point faible, la relative fragilité de la queue de l'hélico, les pales de rotor trop souple (37cm maintenus sur 4 cm, ça fait lourd!), et enfin, un mauvais équilibrage: l'hélicoptère pèse trop lourd de la queue, et a tendance a écraser le train d'atterrissage... Du coup, modification de la cabine pour l'alourdir un peu, et surtout, ajout d'un armement afin de modifier le centrage. Ça ne résout pas tout, mais ça aide! J'aurais préféré pouvoir pondre une cabine biplace (donc plus lourde), mais très difficile, voir impossible de modifier l'implantation des commandes. Florian |
|
Rooo le niveau du truc quoi !!
 Le niveau de complexité...  C'est carrément un MOC de barge ca ! C'est carrément un MOC de barge ca !  Sur la vidéo : - le manche du milieu, on voit bien qu'il bouge les pales. Mais quelles différences y a t-il pour les pales entre un mouvement gauche/droite et un mouvement avant/arrière ? Car sur la vidéo, je ne vois pas de différence.  - comment fonctionnent les pales à l'arrière ? Même avec la photo, j'arrive pas à voir comment ca marche.  - le manche côté gauche, il fait quoi exactement ?  Bon, en lisant mon post, tu vas te dire que j'ai rien pigé. Et t'as peut-être pas tout à fait tort... Utilise des mots simples.  Cependant, je te tire un grand coup de chapeau ! |

.gif ";)")
|
Allez, un petit complément en image sur le fonctionnement:
Tout d'abord, bien penser que même si les photos montrent toujours les pales en même position, en fonctionnement, les pales tournent et passent dans toutes les positions évoquées! Ensuite, bien penser que sur un hélicoptère, la vitesse de rotation du moteur est constante, la puissance délivrée est adaptée automatiquement (de nos jours) afin de maintenir la vitesse. Manche au neutre, le plateau cyclique est a plat, toutes les pales ont la même inclinaison:  Le manche est amené a droite, le plateau s'incline à gauche,de manière a ce que la pale gauche génère la plus grande portance, et que l'hélico s'incline a droite:  Le manche est amené a gauche, le plateau s'incline à droite, de manière a ce que la pale droite génère la plus grande portance, et que l'hélico s'incline a gauche:  Le manche est poussé, le plateau s'incline vers l'arrière, la pale en position arrière génère plus de portance que la pale en position avant, l'hélico avance:  Le manche est tiré, le plateau s'incline vers l'avant, la pale en position avant génère plus de portance que la pale en position arrière, l'hélico recule:  Avec ces différents mouvements, l'hélico peut se déplacer en avant, en arrière, a gauche et a droite. Pour que ce soit autre chose qu'un gros ventilateur, il faut aussi pouvoir le faire décoller. La vitesse de rotation du rotor étant constante, on joue sur l'angle d'attaque de l'ensemble des pales: en tirant sur le levier du collectif, le plateau cyclique descend, toutes les pales prennent de l'angle, la portance augmente, l'hélico monte: 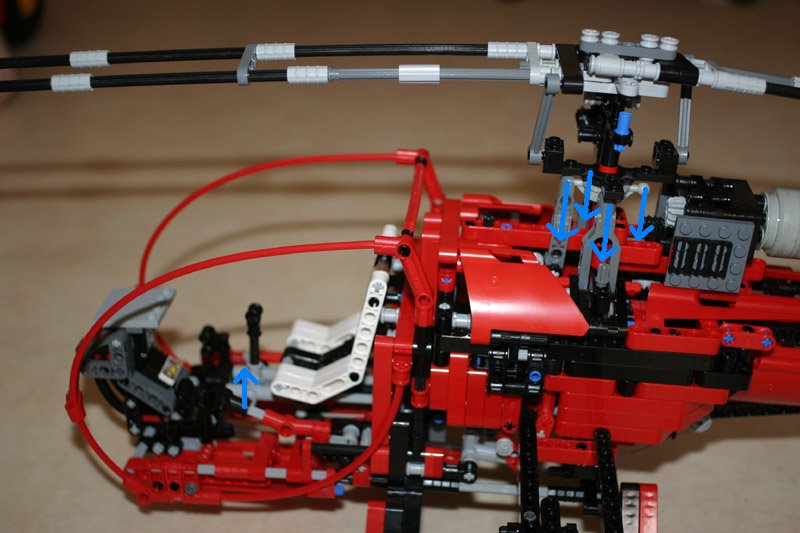 en relâchant le levier du collectif, le plateau cyclique remonte, toutes les pales perdent de l'angle, la portance diminue, l'hélico descend:  Reste enfin le rotor anticouple. son but premier est de contrer le couple énorme que génère le rotor. On peut du coup se servir de ce rotor anticouple pour faire tourner l'hélicoptère sur lui même. Deux solutions possibles pour ça: modifier la vitesse de rotation de l'anticouple, ou modifier l'effort généré, à vitesse constante. On immagine bien que faire varier la vitesse de rotation est inenvisageable avec des équipements légers, sans faire appel a des variateurs de vitesse complexes. Du coup, la solution consiste a modifier l'effort anticouple en modifiant l'angle des pales de ce rotor. Cette fonction est commandée par le palonnier. Palonnier poussé a fond a droite, l'anticouple génère très peu d'effort, le couple du rotor principal est plus élevé que la compensation, l'hélico tourne a droite  Palonnier poussé a fond a gauche, l'anticouple génère un effort important, le couple du rotor principal est plus faible que la compensation, l'hélico tourne a gauche  Voilà, j'espère que ca répondra aux questions! Après, le solution la plus simple pour comprendre et apprécier, c'est de refaire la partie mécanique! Flo PS: Fête des pères aujourd'hui, et en guise de cadeau, j'ai reçu ... un hélico RC... Allez comprendre pourquoi!!! |

|
Je comprends quand tu dis "Si je fais ca, ca diminue la portance de ce côté, donc l'hélico tourne de ce côté, etc".
Par contre, je ne visualise à aucun moment la manière dont ca bouge concrètement. Tu devrais faire une vidéo de très près. |




Retourner vers Vos MOCs Technic
Qui est en ligne ?
Utilisateurs parcourant actuellement ce forum : babar171 et 43 invités