
Le mystérieux NXT


|
j'aimaerai bien participer mais je n'ai pas de pièces et je n'ai pas envi de démonter des modèles
de toute façon je n'ai jamais MOCer et puis pour la rencontre........... bref désolé je ne peut pas participé l'abus de légo est bon pour la santé
 |

|
J'ai expérimenté cette éventualité. Elle est dans ma "solution repoussoir" rangée aux oubliettes. Très difficile à mettre en oeuvre: manque de stabilité, mauvais accrochage au sol, risque d'un "haut sur patte", déséquilibre… Il faut sans doute persévérer. Faire des essais pour toutes les solutions possibles. A+ Roboleo .gif) |


|
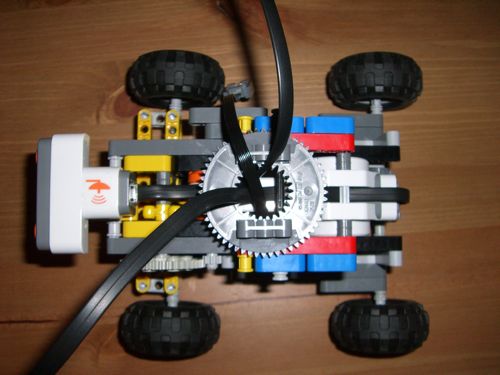
Je viens de faire un prototype de base motrice : 4 roues motrices par 2 moteurs XL avec une turntable dessus.
A ce niveau c'est très solide et rigide, j'ai même trouvé la place pour un capteur dessous. J'ai choisi ces roues car elle sont plus petites = moins de hauteur mais aussi car elles glissent mieux que les pneus ballons, elles ne se déforment pas sous la charge et les pneus ne glissent pas sur les jantes comme certains pneus pleins. A cela il faut ajouter un capteur de rotation ou au moins un repère sur la turntable pour connaître son orientation si le déplacement du robot est autonome. Voici à quoi ça ressemble : 



Je pense qu'au lieu de faire 2 tours on pourrait faire une "poutre" horizontale qui relie les 2 bases motrices et servirait de base pour le bras. On gagnerait en hauteur. Ue idée sympa serait 4 roues directrices qui se mettent en "carré" pour que la turntable puisse tourner, cela utiliserait un moteur de plus soit 3 moteurs par tour (un propulsion, un turtable et un "direction"). Nico tu as fait quelque chose pendant ce temps ? je suis curieux de voir comment tu vois la chose. |




|
bonne idée les pneu qui glissent mais vous allez avoir des problèmes sur sol escarpé si ça glisse.
sinon non j'ai rien fais, parce que je me suis souvenue que mes moteur LX était dans un autre moc donc galère. Mais concrètement qui dispose de toutes les pièces pour faire le robot chez soi? |







|
Très, …très intéressant! Ton idée me séduit. Je vais reprendre et adapter en fonction du matériel dont je dispose.
Pourquoi pas, on peut à ce stade essayer. Mais en "horizontal" difficultés pour loger les NXT et accessoires; on risque d'allonger par la "poutre" tout l'ensemble, donc flexibilité. L'idée du compact ne me lâche pas…
Qu'entends-tu par se "mettre en carré"? On rejoint l'idée de Thibaud, non?. On teste? Je viens de me décider d'acquérir le kit #8275 pour élargir ma réserve de pièces et suivre plus facilement tes proto's. A nous deux on pourra réaliser l'ensemble de la structure d'une manière complémentaire. Dernière question: as-tu la possibilité de modéliser ton proto en 3D? A+ Roboleo |
|
Pour la base précédente il faut noter que remplacer les roues par des chenilles ou même par d'autres roues modifie complétement la structure.
J'ai démonté en faisant une notice photo que je publierai semaine prochaine.
Cela ne me tente pas vraiment, je passe déjà beaucoup trop de temps devant l'écran.
Voici l'idée, c'est juste pour montrer le principe de la base d'une tour : En mode "normal" :  En mode "rotation turntable" :  Il y a deux problèmes : 1 - motoriser des roues directrices = compliqué et moins rigide 2 - utilise un moteur pour actionner la "direction" Ensuite mon imagination est partie en vrille et j'ai pensé à une structure différente : Une structure à 4 essieux, 4 turntables :    Sur les photo seulement 2 turntable et un essieux pour montrer. On peut réduire la hauteur de 3 tenons sous la turntable. Donc chaque essieu est moteur, un moteur XL pour 2 essieux, et un moteur NXT pour 2 turntable. Le robot aurait 4 fonctions simples pour le déplacement : Avancer ou reculer en ligne droite, tourner sur lui-même à gauche ou à droite. Ensuite on pourrait imaginer des déplacements plus complexes comme rouler en crabe ou tourner avec les 4 roues en combinants les roues motrices et directrices. Il est assez grand pour accueillir un bras et des NXT. Il faudrait lui ajouter une "suspension" ou une articulation afin de l'adapter au terrain. Qu'en pensez-vous ? EDIT : Voici la notice pour la base motrice de mon post du 30 décembre : http://alban.nourry.free.fr/pour_forums/notice-proto.pdf |
|
Je continue mes essais en reprenant l'idée de roboléo, c'est à dire une base de tour avec une direction et 2 roues motrices. En fait c'est le seul moyen avec la structure à 2 tours de tourner sans frottements : On roule et actionne la direction afin d'orienter la base de la tour.
    Cette base commence à être haute mais cela reste raisonnable, au pire il faut externaliser le moteur de la direction dans la tour avec le NXT. La ou cela se complique c'est pour programmer la direction, c'est bien sur possible, faudra juste prendre le temps et faire les bons algorithmes. J'attend vos réaction sur tous ces protos. |






|
Ton idée est bonne je trouve, mais pourquoi vouloir externaliser la direction? elle est trèsbien là où elle est non?
J'ai une petite question si la direction se fait par les deux roues avant, pourquoi mettre une turntable au dessus? avec l'idée de roboléo il n'y a je pense pas besoin de turntable. Sinon j'aime beaucoup ton idée .gif ":)") Anio : Avec le moteur du NXT pour gérer la direction il n 'y a pas besoin de capteur sur les biellettes. |
|
Finalement Anio j'ai repris ton idée avec le capteur de lumière afin de pouvoir suivre une ligne au sol.
Pour l'externalisation du moteur de direction c'était une simple supposition. Avec 2 tours les turntable permettent de rouer en crabe et donc de se positionner précisément à côté d'un objet. Ce sont des essais, moi la plate-forme carrée avec 4 turntable me plaît bien aussi. Attendons le retour de roboléo |
|
Ok anio j'avais pas saisi pour le capteur, c'est vrai que se serait une bonne idée
Alban, si ta solution ammène moins de frottements au moment de tourner, faire tourner l'ensemble par la turntable ne risque pas de re poser le souci du frottement? |
|
En effet, idée intéressante; très utile pour repérer un bord de table par exemple. A retenir.
J'ai de mon côté repris l'idée d'Alban pour la plate-forme carrée, et je travaille dessus… Je viens d'acquérir le bull # 8527. Pour l'instant je trie les pièces pour compléter mes réserves; c'est un vrai régal de variétés. Je monterai le bull plus tard.
En effet, elle n'est pas indispensable, sauf si elle commande la direction. En attendant la suite, A+ Roboleo A+
Roboleo " Je ne cherche pas, je trouve…" P. Picasso |
Retourner vers Vos MOCs Technic
Qui est en ligne ?
Utilisateurs parcourant actuellement ce forum : Aucun utilisateur inscrit et 26 invités