me voici de retour: je me demandais ce que je pourrais construire après ma locomotive! J'ai le plaisir de vous présenter mon nouveau projet, l'idée est de réaliser une maquette radiocommandée du char Leclerc. Ce sujet est intéressant par ses multiples côtés techniques.
1) Un châssis rigide
2) Des amortisseurs sur les 2x6 roues des chenilles avec une souplesse et une amplitude importante.
3) Une propulsion permettant de rouler à plusieurs vitesses en fonction du terrain et qui permette de diriger le char, voire de pivoter sur place.
4) Rotation de la tourelle sur 360° sans butée.
5) Montée / descente du canon.
6) Ensemble radiocommandé.
7) Moteur factice V8
7) Habillage aussi proche que possible de la réalité...
Le vrai char ressemble à ça:

 [/URL]
[/URL]Cela fait environ un mois que j'ai commencé. Toutes les fonctions que j'avais imaginées sont intégrées et fonctionnent. La suite c'est de l'habillage, pas forcément simple! Alors avant d'entrer dans las détails, voilà ce que ça donne:
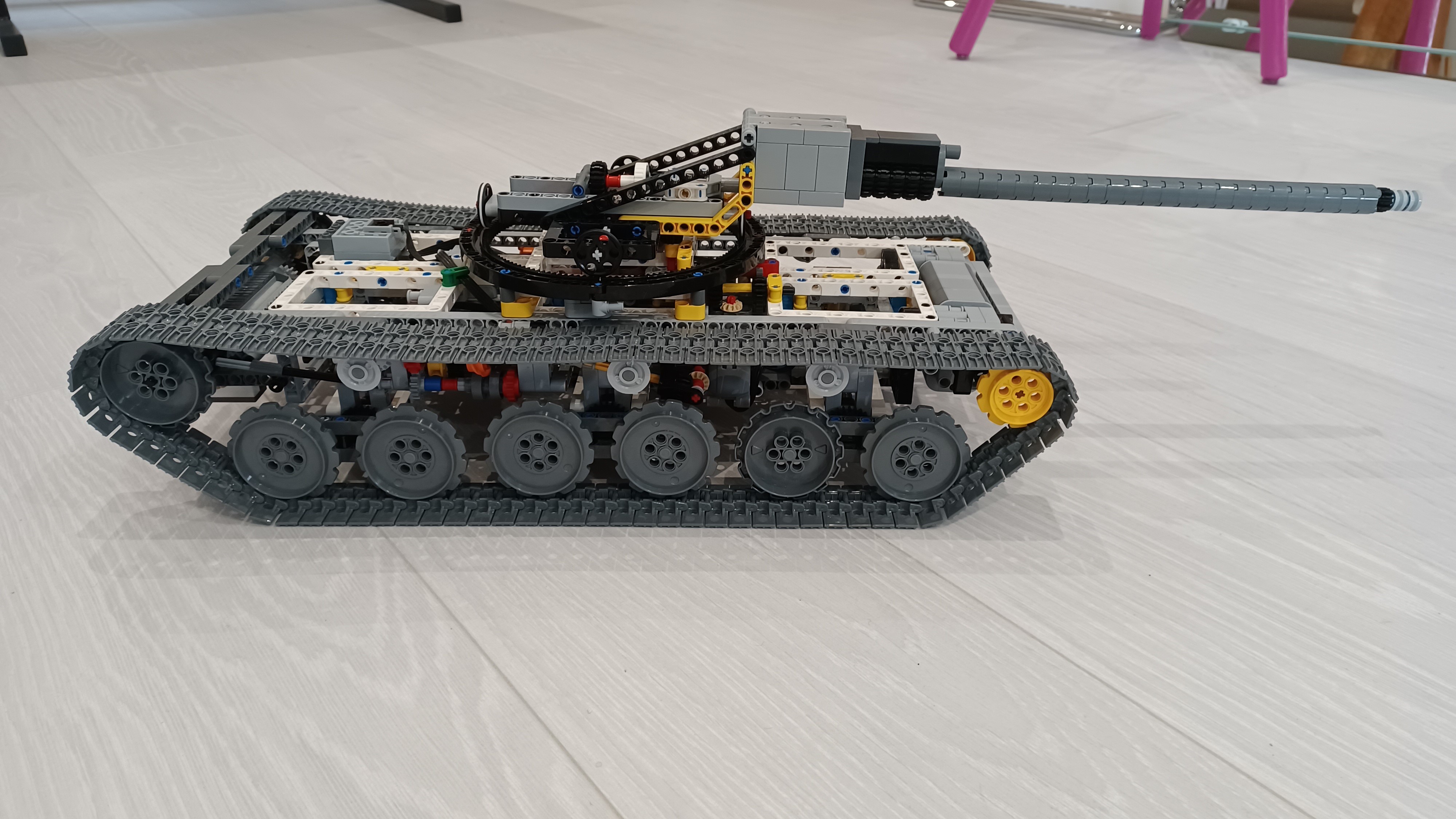
La suspension pour chaque roue a un débattement d'environ 25mm. Il y a un bras de suspension pour 2 roues, soit 3 par côté, 6 en tout. Chaque paire de roue est montée sur un châssis pouvant pivoter en son centre sur le bras de suspension.


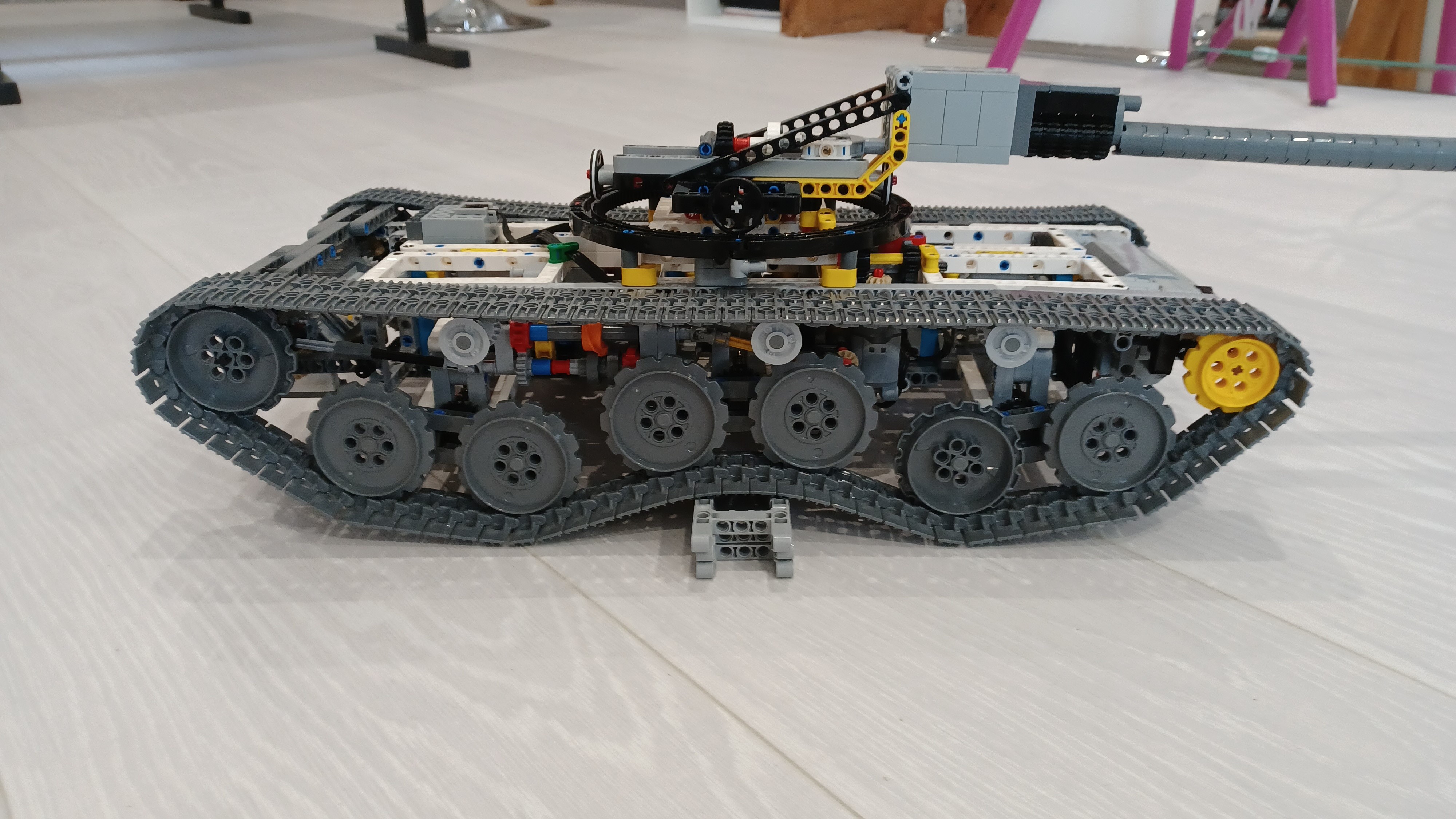
Pour l'instant la suspension est encore en butée haute mais il s'en faut de peu pour que le char s'affaisse. Qu'en sera-t-il lorsqu'il sera terminé? Faudra-t-il modifier la suspension? A suivre ...
Le pivotement de chaque paire de roues par rapport au bras de suspension est assuré par une petite "turn table". Cela est beaucoup plus solide, rigide, qu'un simple axe, d'autant plus qu'il y a 4 tenons de porte à faux. Cette solution fonctionne bien.
Chaque bras de suspension est un parallélogramme de 5 tenons de haut et 7 tenons de long. L'amortisseur est placé en travers du parallélogramme.
Ce positionnement de l'amortisseur a de multiples avantages:
- il ne nécessite pas de point d'ancrage haut sur le châssis, il est toutefois très proche du châssis.
- Le fait que l'amortisseur soit de travers augmente la course de l'amortissement. C'est aussi la condition pour que le système fonctionne. S'il était vertical dans le parallélogramme, celui ci n'aurait aucun effet.
- A noter que dans cette solution, la course augmente également puisqu'à mesure que l'amortisseur se comprime, le point haut de fixation remonte également.
Cela convient parfaitement à cette application.
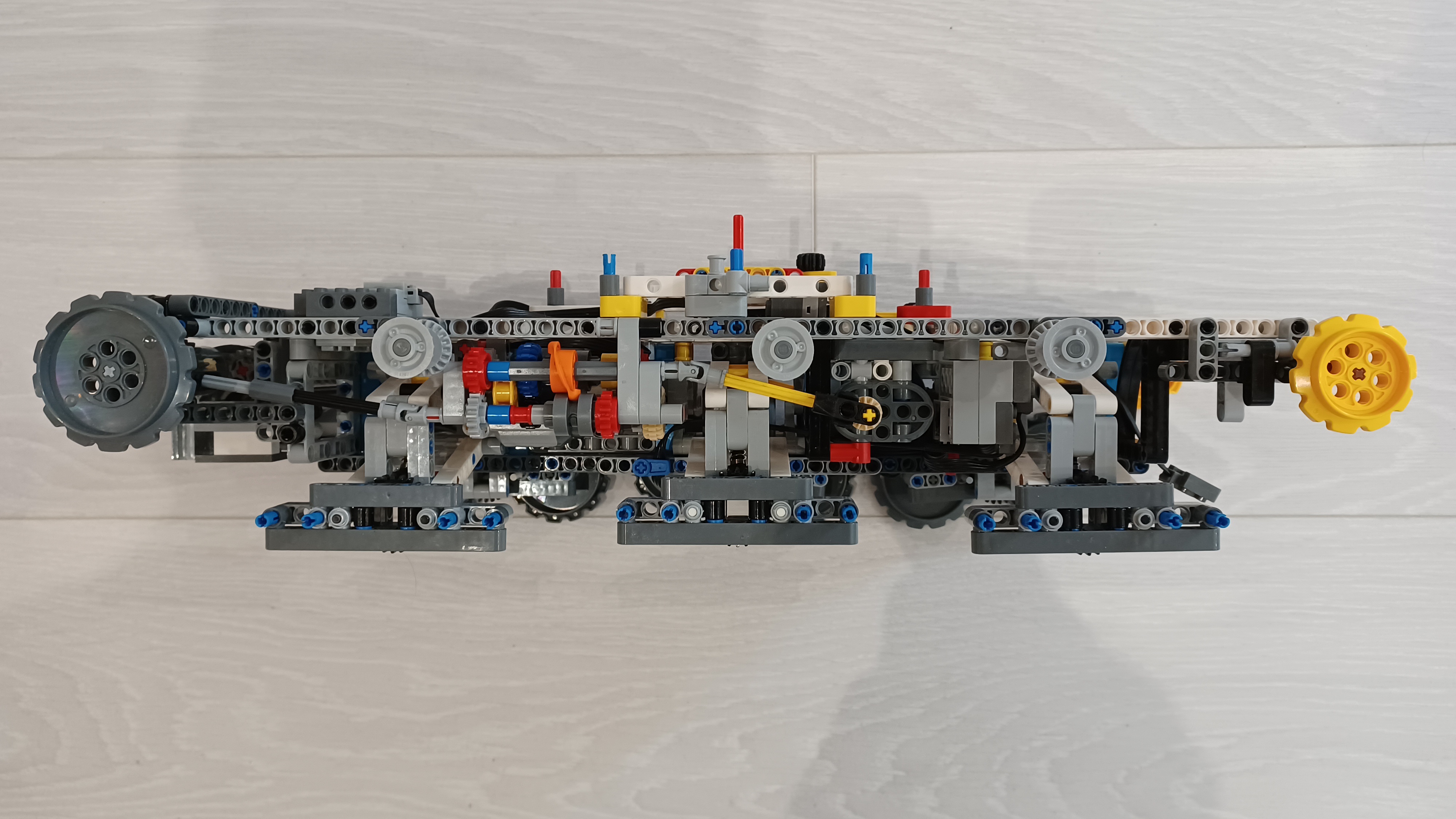
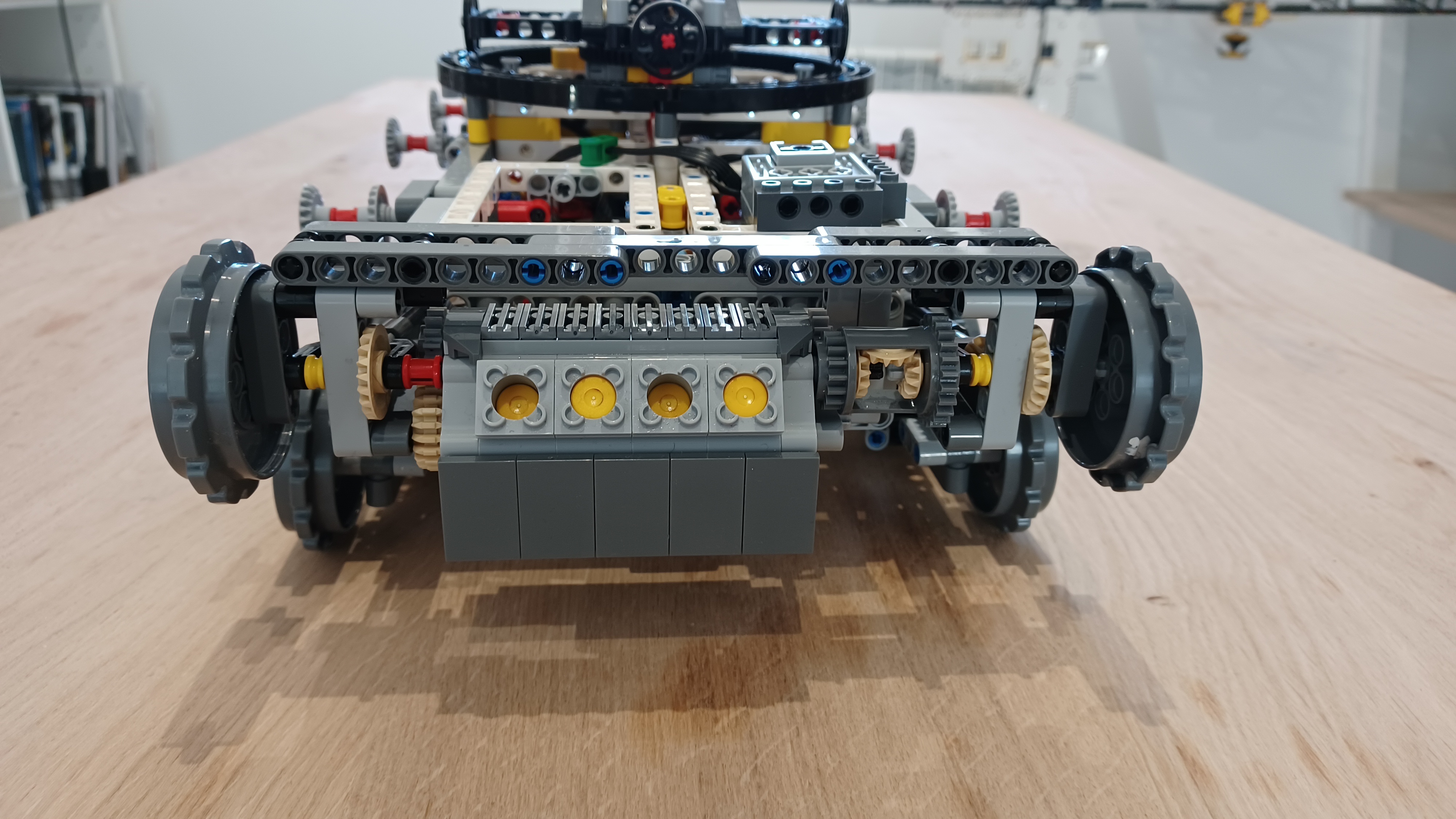
Vue générale de dessous.
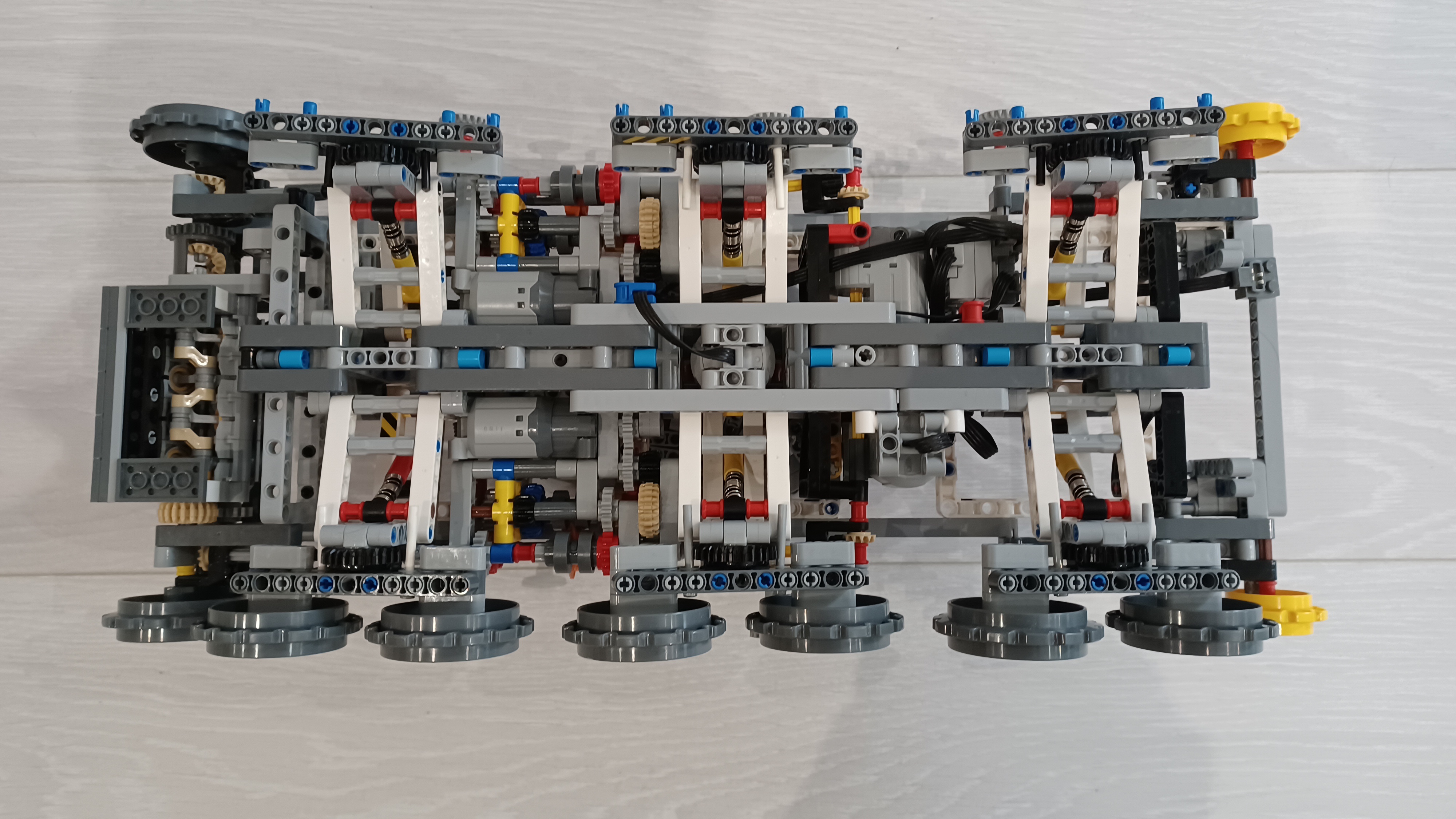
Le châssis est en forme de "T". Les bras d'amortisseurs sont fixés sur la barre verticale du "T".
De gauche à droite on distingue le V8 factice, puis les 2 blocs moteur/BV, au centre le moteur qui actionne le canon, un peu plus à droite et au dessus c'est le résolveur qui commande les changements de vitesse mécanique, en dessous c'est le moteur pour la tourelle, et enfin devant, entre les galets jaunes prend place le boitier de piles.
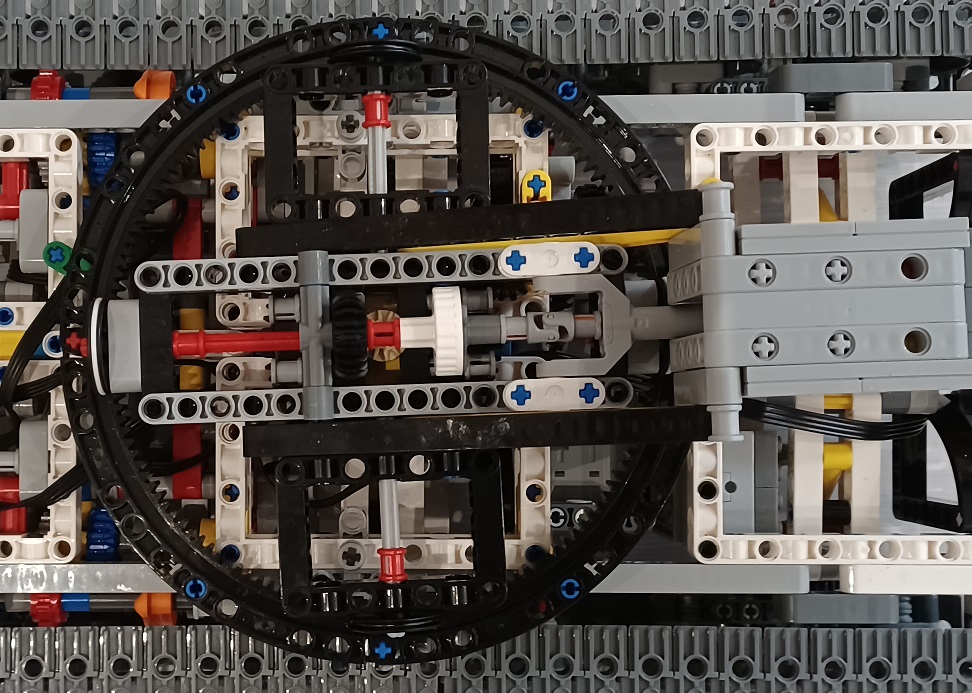
Vue générale de dessus.
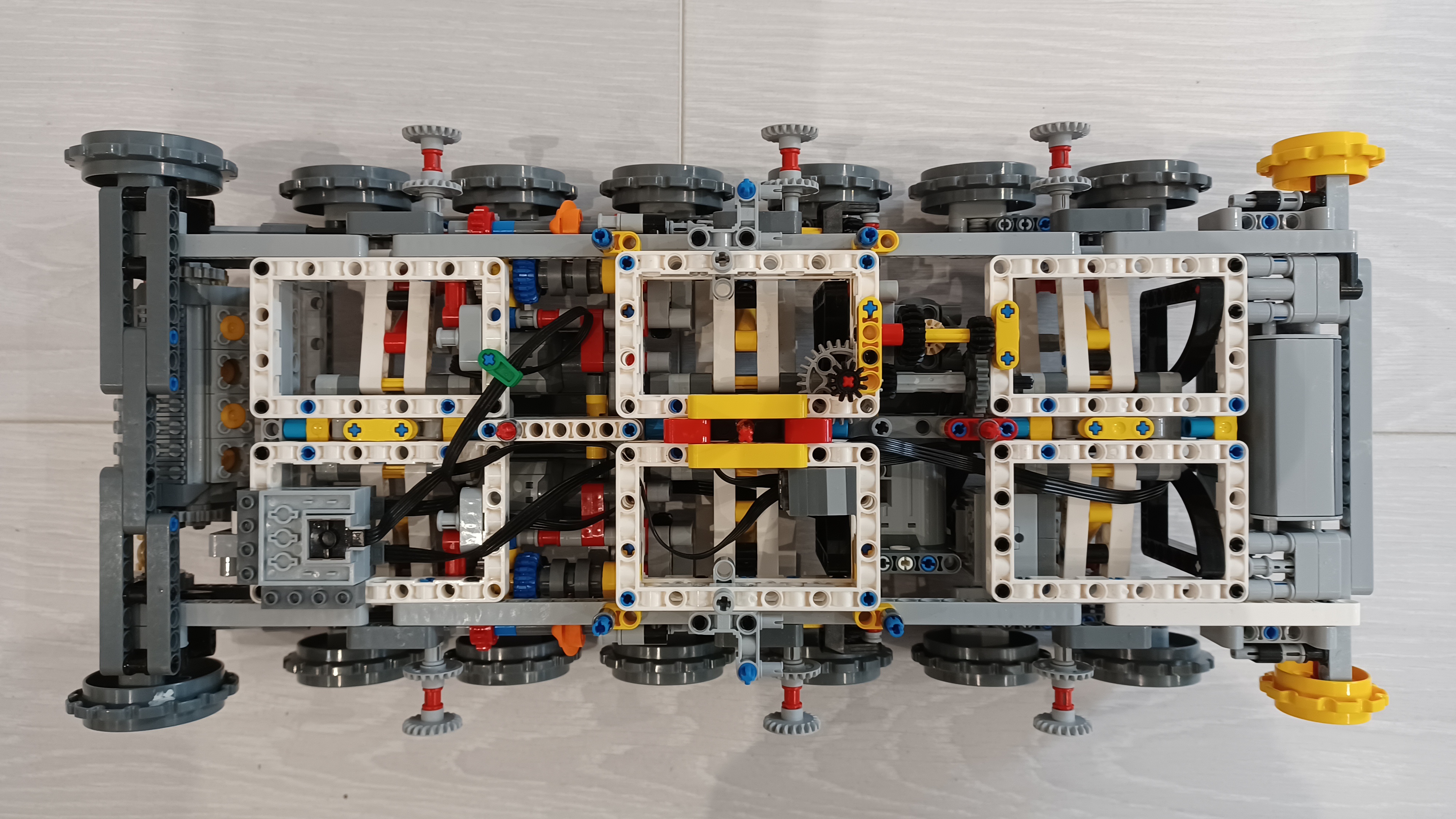
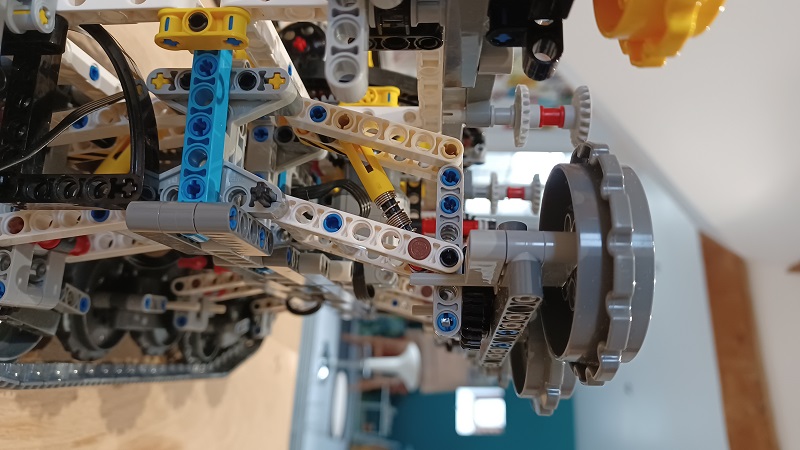
Le mouvement du canon est assuré par l'axe rouge (sortie directe du moteur) qui se trouve au centre de la tourelle. Dans l'absolue cette solution modifie la position du canon quand la tourelle tourne mais compte tenu de la démultiplication, il faut faire environ 25 tours de tourelle pour effectuer la course complète du canon. J'ai considéré que cet inconvénient est négligeable en regard du fait qu'il faudrait installer une alimentation, un moteur et une SBRICK dans la tourelle pour le régler.
Quant à lui, le 12T actionne la "turn table" pour faire tourner la tourelle.
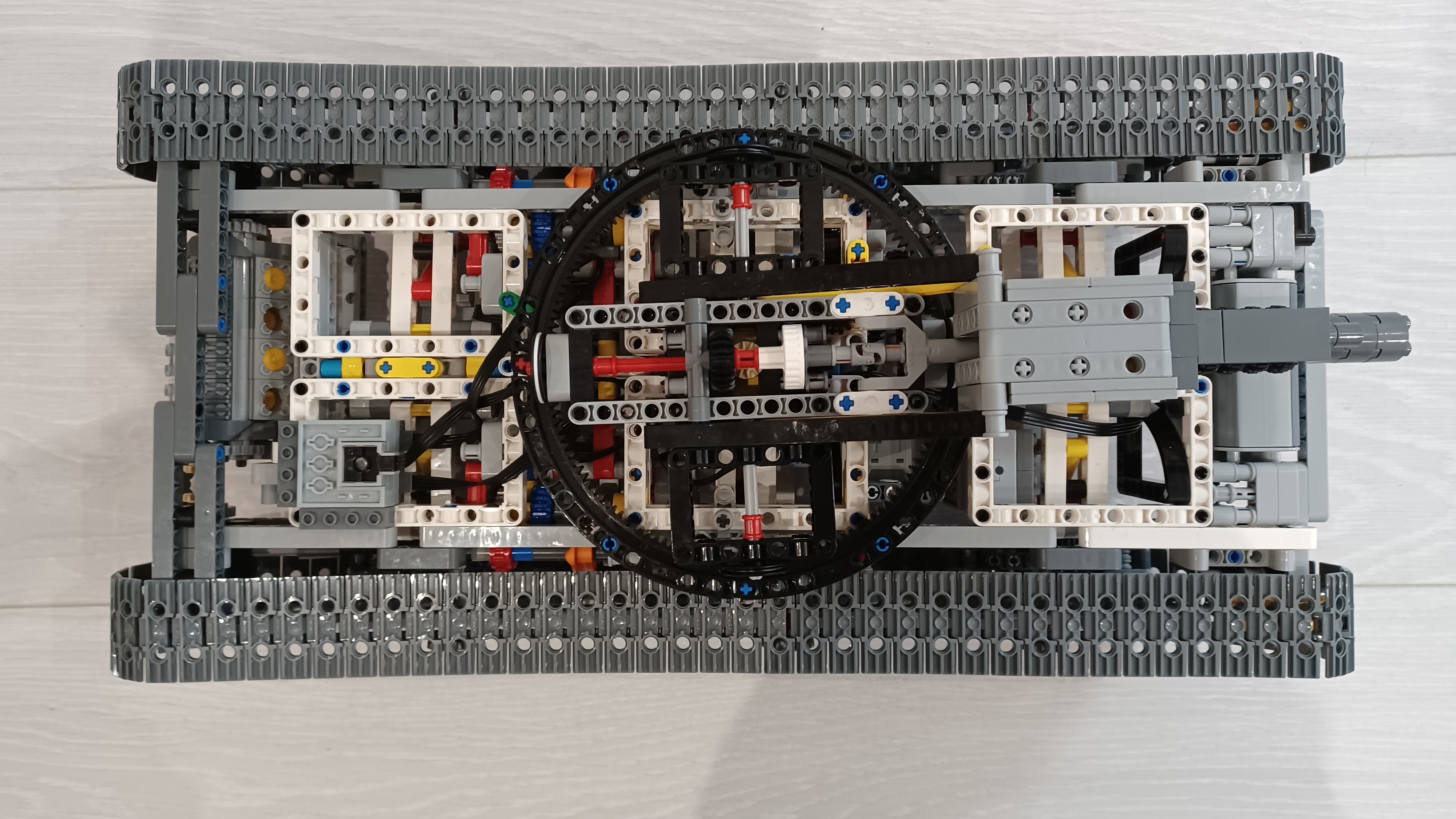
Vue avec le chemin de roulement pour la tourelle ainsi que l'implantation du canon.
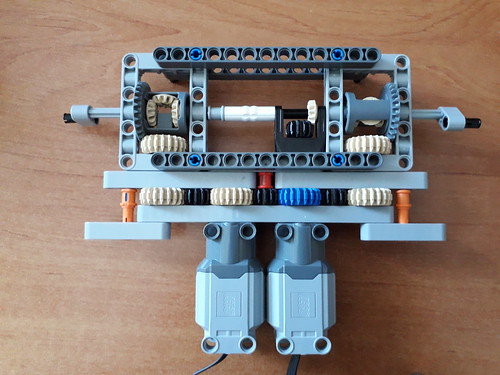
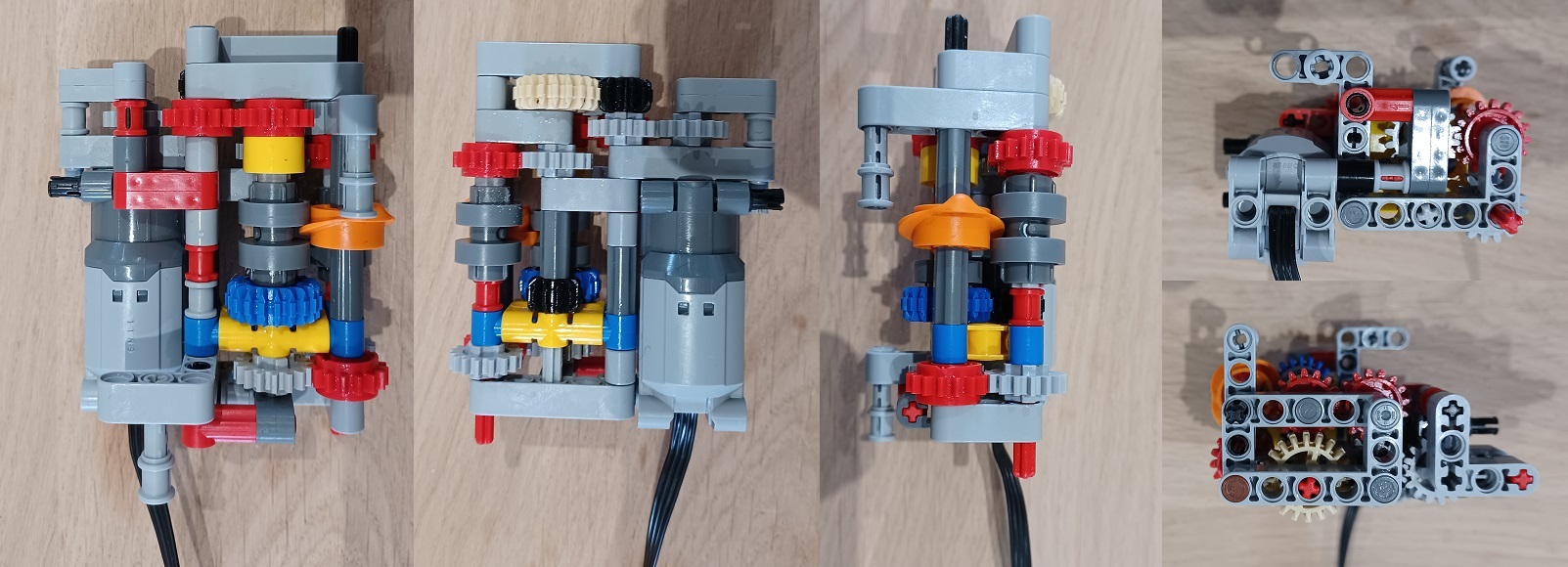
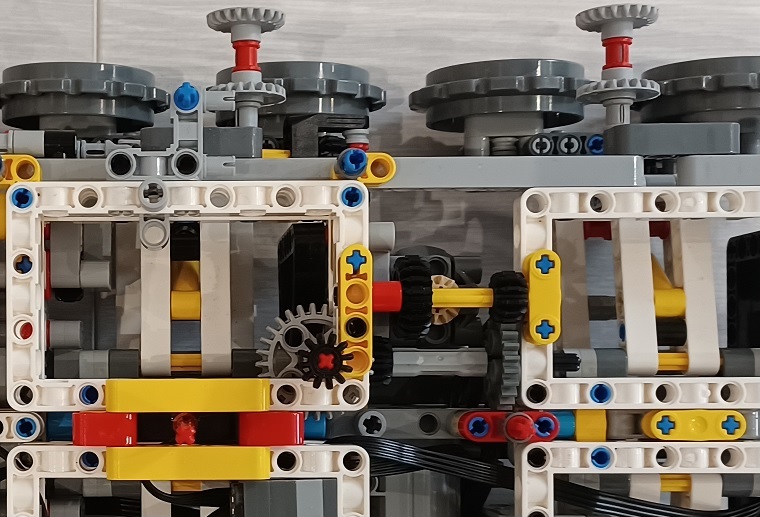
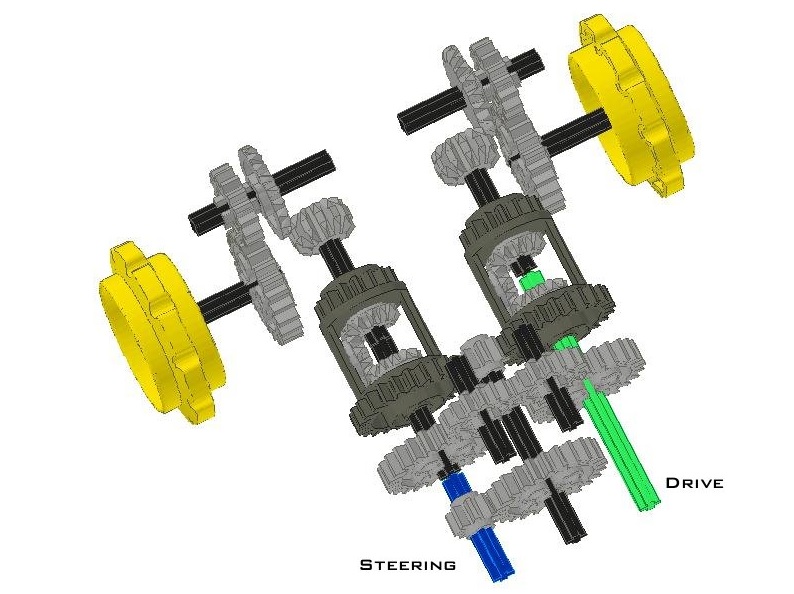
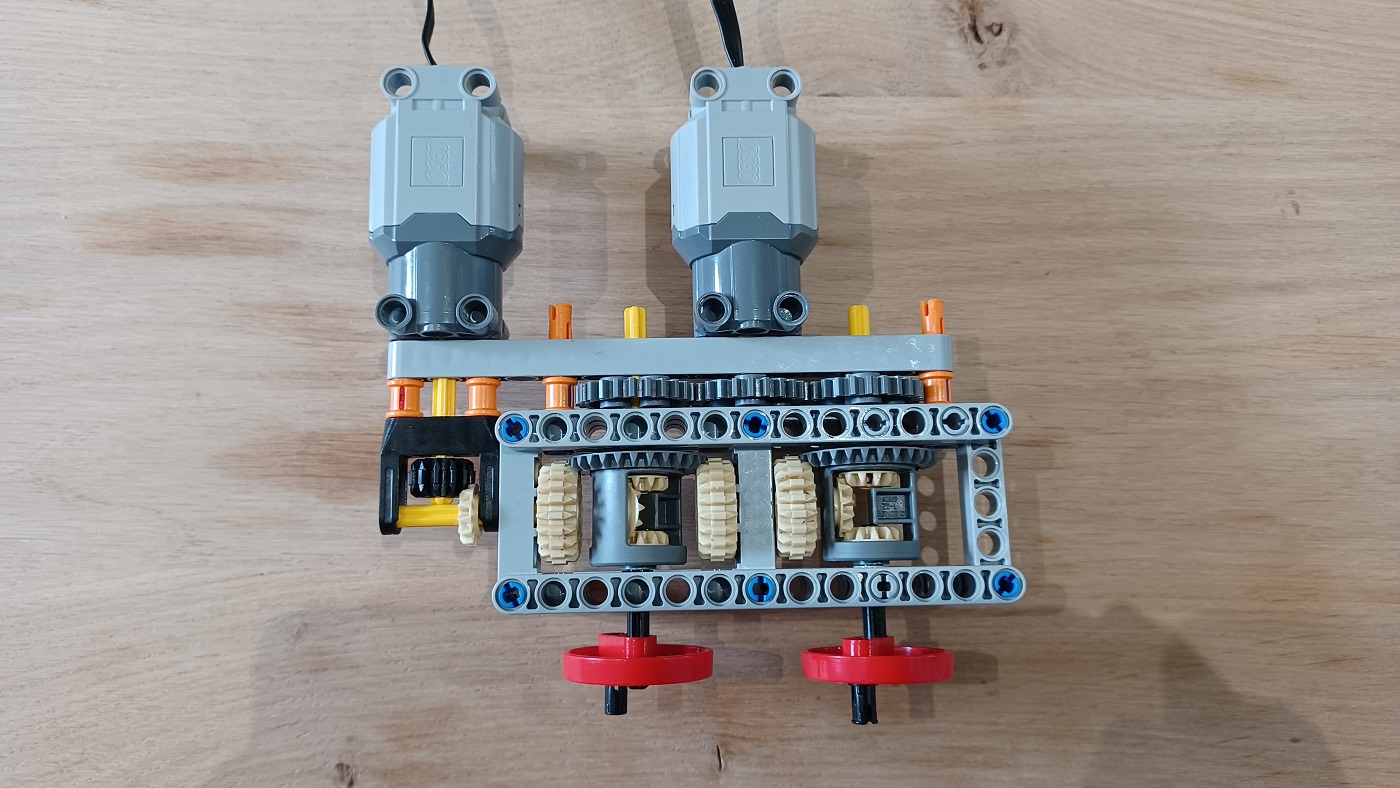
2 blocs moteur/BV sont réalisés, 1 pour chaque chenille. ils sont symétriques pour s'implanter de la même manière à droite comme à gauche.
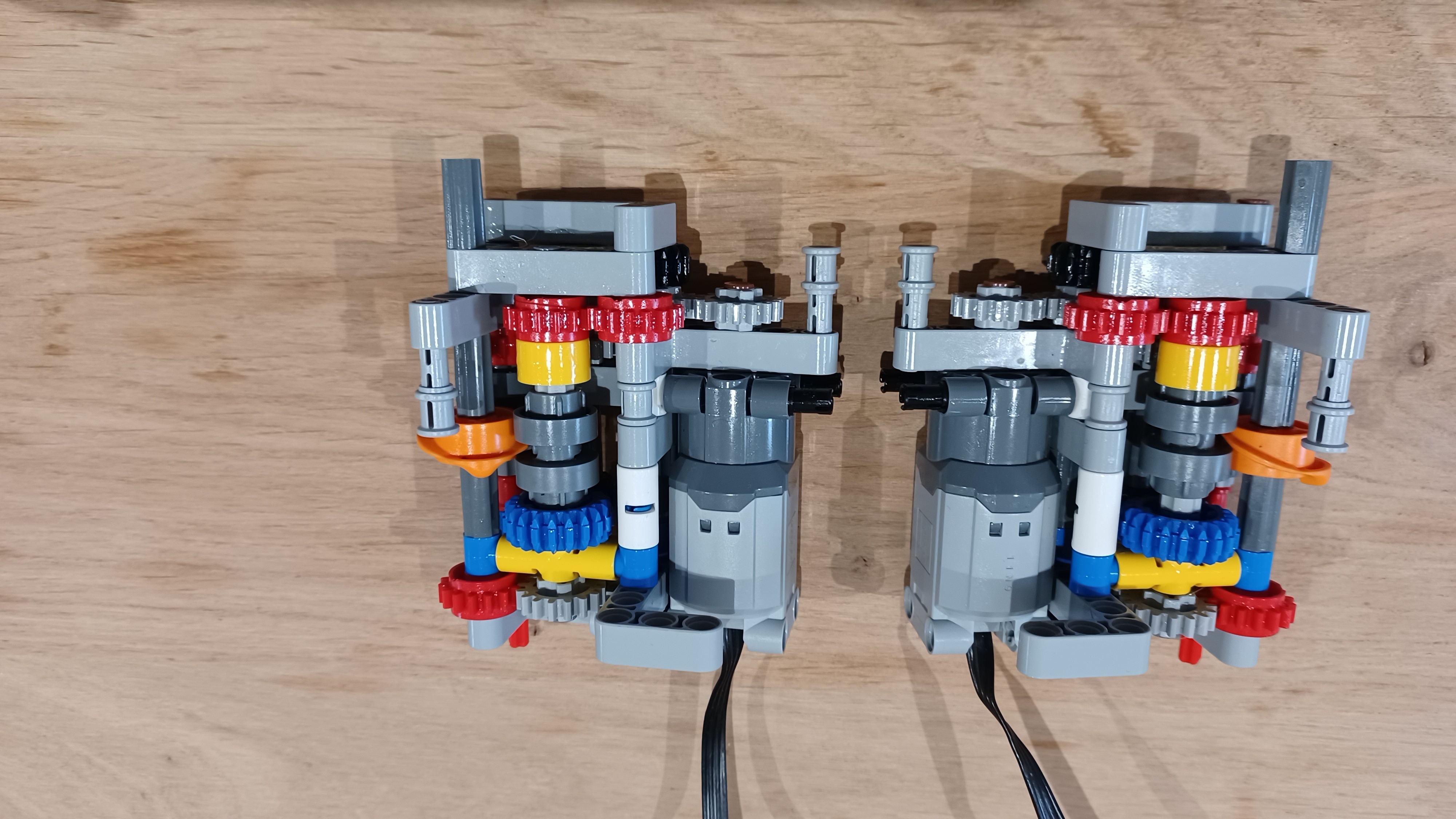
En détail différentes vues. La sortie de boîte est l'axe rouge, le sélecteur de vitesse est l'axe noir. Les rapports sont les suivants:
- Vitesse 1 => 12T/20T x 12T/20T soit une réduction de 2.77
- Vitesse 2 => 12T/20T soit une réduction de 1.66
- Vitesse 3 => 16T/16T soit une réduction de 1
- La position 4 est le neutre qui n'est pas utilisé.
L'écart entre les rapports est volontairement plus élevé que pour la plupart des boîtes de vitesse que j'ai déjà monté. C'est pour avoir plus de variation de vitesse avec moins de rapports. Dans la construction un soin tout particulier a été apporté au verrouillage des entraxes des engrenages de telle sorte à éviter tout "craquement".
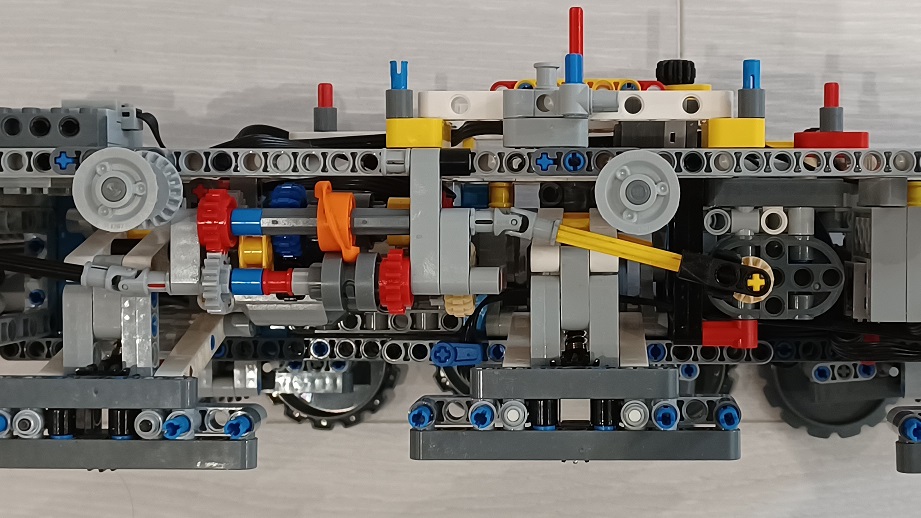
Sur cette vue on voit le bloc moteur/BV ainsi que la sortie du résolveur qui actionne la commande de vitesse. J'ai choisi la solution du résolveur parce que très simple à mettre en œuvre. Il prend 3 positions en quadrature (-90° / 0° / +90°). C'est aussi ce qui impose le choix de 3 rapports. Je profite de la sortie opposée du résolveur pour commander simultanément le bloc moteur/BV de gauche.
Le V8 est monté à l'arrière. Il est entrainé par les deux chenilles à travers un différentiel. A noter que la chenille de gauche relie le différentiel par un axe qui traverse le moteur. La sortie du différentiel fait de même pour arriver à l'arbre à came du moteur sur le côté gauche. Cette solution ne me réjouie pas, elle génère pas mal de frottement au travers du moteur mais pour l'instant elle existe ... si vous avez des idées? Monter le moteur n'est pas possible. Le descendre d'un tenon est possible. l'avancer d'un tenon est aussi possible. Mais ces éventuelles solutions font passer un axe au dessus ou devant le moteur, ce qui n'est pas terrible ... A revoir quand la carrosserie existera
Le moteur de la tourelle est vertical, sa sortie c'est le 12T beige. La réduction est la suivante: 20T/12T x 24T/12T x 28T/12T x 60T(turn table non présente sur la photo)/12T soit: 38.9. Le mouvement reste assez vif mais en faisant varier la vitesse du moteur, c'est parfaitement réaliste.
La commande du canon est assez simple. Le moteur est monté vertical dans l'axe de la tourelle, la sortie moteur c'est le 12T conique beige qui entraine un 20T. Ce dernier est relié au vérin par l'intermédiaire d'un embrayage qui agit lorsqu'il arrive en bout de course
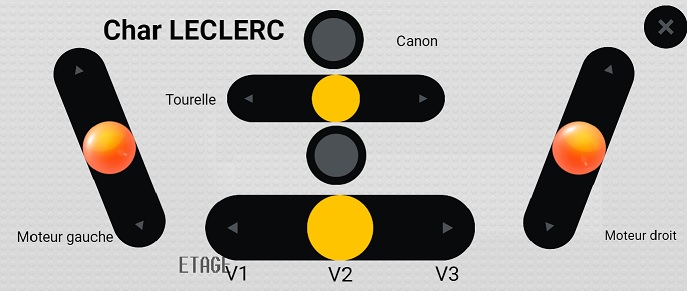
Concernant la radio commande, comme il y a 5 commandes et qu'une Sbrick ne dispose que de 4 canaux, il est nécessaire d'implanter 2 Sbrick. La première commande les moteurs droit et gauche. La seconde réalise les changements de vitesse, les mouvements de la tourelle et du canon.
Tout peut fonctionner simultanément mais c'est moi qui n'en ai pas la possibilité. Tenir le téléphone et piloter le char monopolise mes deux mains. J'aurais aimé pouvoir activer le changement de vitesse en roulant ...
Voilà ce que j'ai sur mon téléphone:
Ce qui lui manque aussi pour un char d'assaut, et qui est l'essence même de son existence c'est de pouvoir tirer des projectiles. C'est une fonction que je ne sais pas faire. Y a-t-il un actionneur spécifique? comment se commande -t-il? existe -t-il des tubes lego?
Alors, si l'un ou plusieurs d'entre vous a / ont des idées, n'hésitez pas à les émettre ...
C'est tout pour aujourd'hui. Prochainement j'essaierai de faire une vidéo. Maintenant reste à faire la carrosserie et là il y a encore du travail... A une prochaine et merci de votre visite.




 est une pièce mobile qui n'a que 4 positions utilisables, la mettre en mouvement nécessite de n'avoir que très très peu de jeu hors là ton mécanisme propose 12T simple bevel 12T double bevel + cardan, ce qui à mon avis engendre un jeu d'au moins 1/16 ou 1/8 de tour, c'est trop.
est une pièce mobile qui n'a que 4 positions utilisables, la mettre en mouvement nécessite de n'avoir que très très peu de jeu hors là ton mécanisme propose 12T simple bevel 12T double bevel + cardan, ce qui à mon avis engendre un jeu d'au moins 1/16 ou 1/8 de tour, c'est trop. .
.
.gif ":)")
.gif ";)")

 +
+  seront plus adaptés, Ca te permettrait de mettre tes moteurs l'un au dessus de l'autre et d'avoir une construction symétrique (mais aussi une construction plus épaisse
seront plus adaptés, Ca te permettrait de mettre tes moteurs l'un au dessus de l'autre et d'avoir une construction symétrique (mais aussi une construction plus épaisse 

 orienté dans le sens des roues paraissaient mieux. Et en fait, comme tu le précises, le sujet date de 2008, précisément l'année de sortie des autres diff. justement.
orienté dans le sens des roues paraissaient mieux. Et en fait, comme tu le précises, le sujet date de 2008, précisément l'année de sortie des autres diff. justement.