Nico71 a écrit:Par contre, le bras de levier du triangle de suspension de 3t, c'est un peu léger. En même temps, tu as déjà des voies assez larges donc ça n'aurait fait qu'empirer
Bah l'avantage c'est qu'un seul amortisseur par roue suffit pour supporter le poids de l'engin. Mais comme tu dis, ça a été mis là surtout pour éviter d'avoir une voie trop large. Là, c'est le plus petit que je puisse faire. Ou alors, il fallait que l'axe de pivot des triangles ne soit pas aligné avec celui du cardan et donc un axe à longueur variable. Mais en fait, le plus contraignant en lego, c'est vraiment les renvois d'angles qui prennent une place folle.
Sinon, je ferai une review très détaillée quand la notice sera finie mais pour ça il faudra encore attendre quelques temps Je ne review pas le modèle maintenant car il n'est pas encore dans sa version définitive.
Le modèle est fini depuis maintenant bien longtemps... Et la notice est en bonne voie de finition...si j'arrive à corriger les bugs auquel je fais face actuellement, ce qui peut prendre beaucoup du temps !
Mais il faudra de toute façon que j'attende deux choses avant de la finir : -La modélisation du moteur L -La modélisation des tuyaux pneumatiques, j'ai demandé à Jurgen de les faire à l'époque ( il y a un mois ) où je maîtrisais pas trop leur modélisation. Maintenant, je pourrais les faire moi-même mais ça le fait pas trop de demander à quelqu'un de les modéliser et puis que je fasse tout moi-même
Edit : et il faudra aussi que je remonte le modèle en suivant la notice pour voir si c'est bien clair
Petit message pour vous dire que la notice est bientôt finie et qu'il est temps car j'en ai complètement ras le ***. Trop de temps perdu causé par des programmes buggés... J'ai vraiment envie de retoucher à mes pièces lego là.
Et faut encore que je reconstruise la jeep en suivant la notice pour voir si tout est réalisable... pfff. Ce qui me déprime le plus, c'est que la notice est loin du niveau de celles de jurgen,blakbird,... et que je dois avoir passé bien plus de temps qu'eux à la crée. Mais bon, voyons le côté positif, je sais comment le faire maintenant.
GuilliuG a écrit:Trop de temps perdu causé par des programmes buggés...
Ahhh, je te l'avais dit hein !
Dans tout les cas, bravo pour l'investissement, après on ne regrette pas même si effectivement pour un moceur, on a envie furieusement de retoucher au lego. Blakbird qui fait des belles notices effectivement ne moc pas, c'est une approche différente
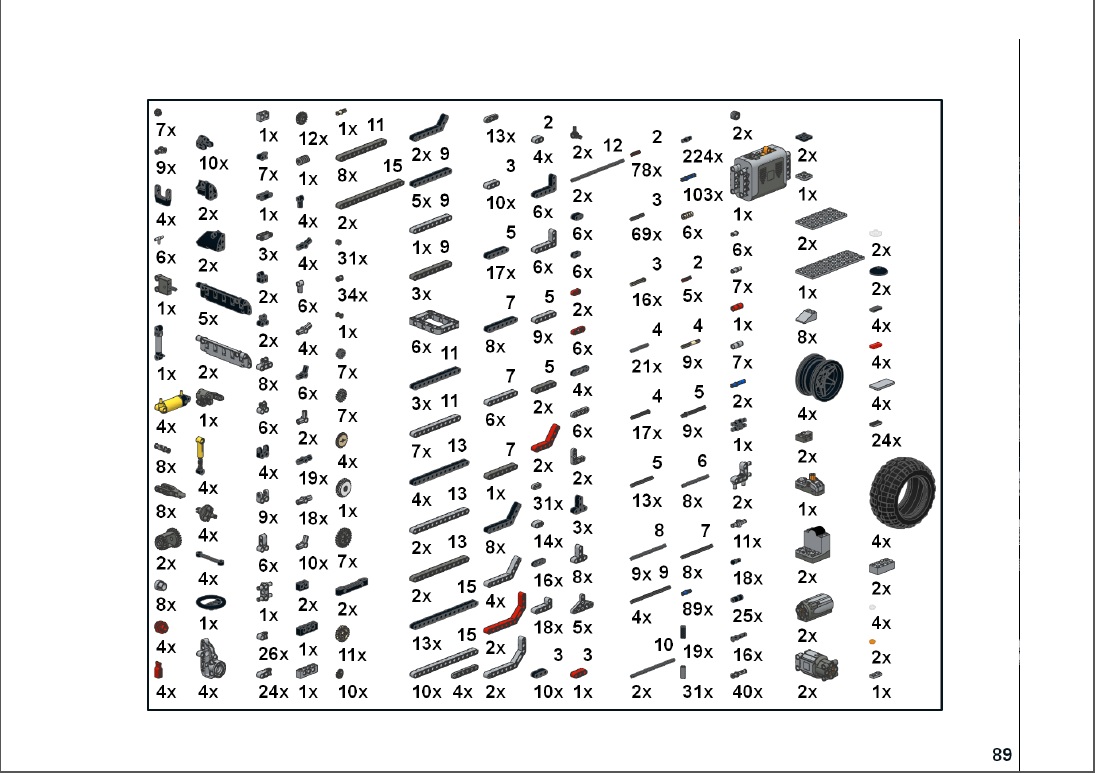
BOM = Bill of materials (c'est l'inventaire de pièces si tu veux). Sinon, pour vous tenir au jus, une première version de la notice a été finie, j'ai reconstruit le modèle en suivant cette notice et modifié pas mal de trucs pour que le montage se fasse plus simplement. Je finirai la deuxième version aujourd'hui si tout va bien. Donc vous inquiétez pas, le modèle sera bien présenté durant ces vacances, je sais juste pas vous dire quel jour
Je vous avais promis que je présenterais le modèle durant ces vacances, alors ,voici enfin la review de ce modèle, fini, je le rappelle, fin août !
La notice de ce modèle est disponible au prix de 9euros. Me contacter à [email protected] pour l'acheter. Payement par paypal (avec cette adresse) ou iban.
Tout d'abord, je voudrais remercier quelques personnes qui m'ont aidé à mener à bien ce projet - mon père, qui m'a aidé à résoudre des problèmes que j'ai rencontré lors de la création de la notice -Nathanaël Kuipers qui m'a également aidé pour la notice et avec qui j'ai pas mal discuté du modèle lui-même -Jurgen Krooshoop qui, même s'il n'a finalement pas modélisé les tuyaux, m'a donné quelques conseils pour que je le fasse plus facilement -Philo qui a modélisé les nouveaux moteurs pfs -PG52 qui m'a prêté gratuitement ( il a même payé les frais de port !) trois panels noirs qui me fallait pour finir le modèle -Et de plus loin : blakbird,nico71,tony_st et toutes les personnes que j'oublie surement Review
Commençons, par le commencement, c'est à dire par vous présenter le modèle réel :
Il s'agit d'un concept car, crée par le groupe chrylser en 2005 et présenté comme le véhicule le plus performant au monde. Il est unique car il possède non pas un moteur V8, mais bien deux ! Développant chacun 508 chevaux, si mes souvenirs sont bons. Heureusement, ils sont équipés d'une technologie permettant de désactiver des pistons pour consommer moins lors de déplacement sur route ( il y a moyen de rouler juste avec un V4-l'autre moteur étant coupé). Mais là où cette jeep est exceptionnelle, c'est qu'elle peut tourner sur place (zero turning radius mod). Pour ce faire les roues s'orientent d'une manière bien spécifique :
et les roues situées du côté gauche tournent en sens opposé de celles situées du côté droit. Ainsi, contrairement à nos voitures classiques, ce sont les roues gauches ou droites qui sont liées entre-elles ( et non celles de devant ou de derrière). Si vous êtes intéressés par le fonctionnement de la jeep, je peux vous filer le brevet déposé par le groupe chrylser ( je l'ai trouvé sur la toile et c'est très bien expliqué pour comprendre comment ça marche là-dessous).
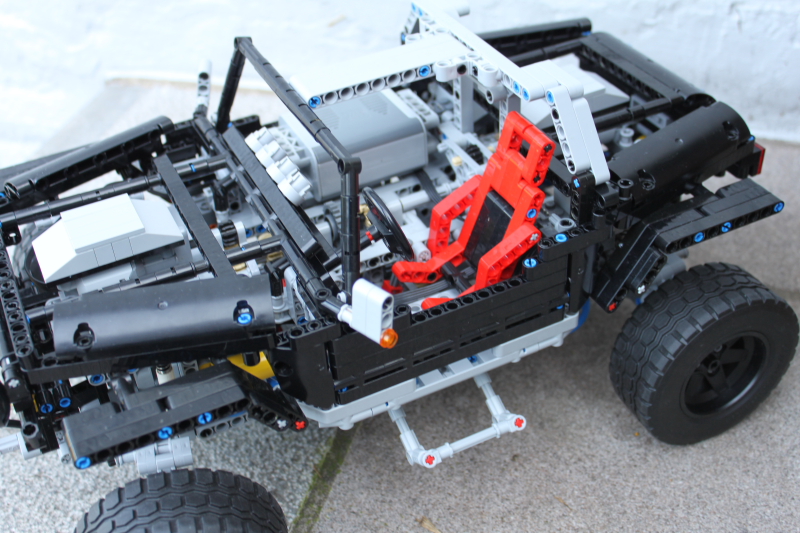
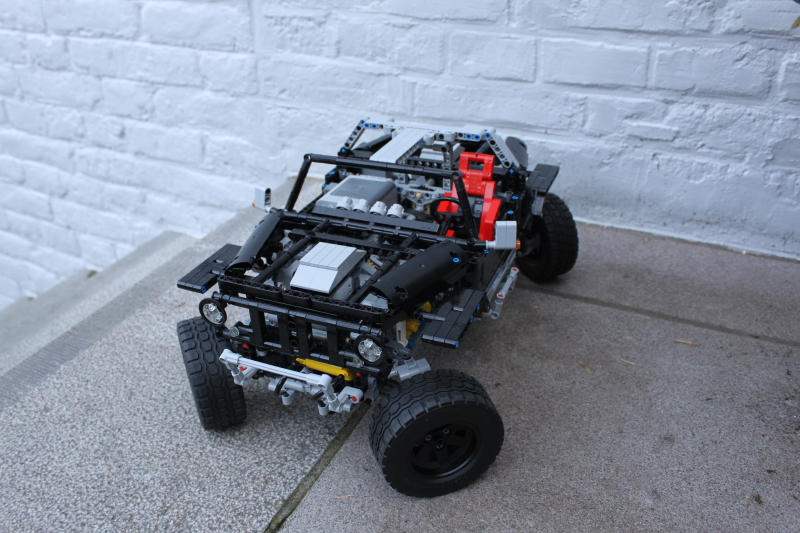
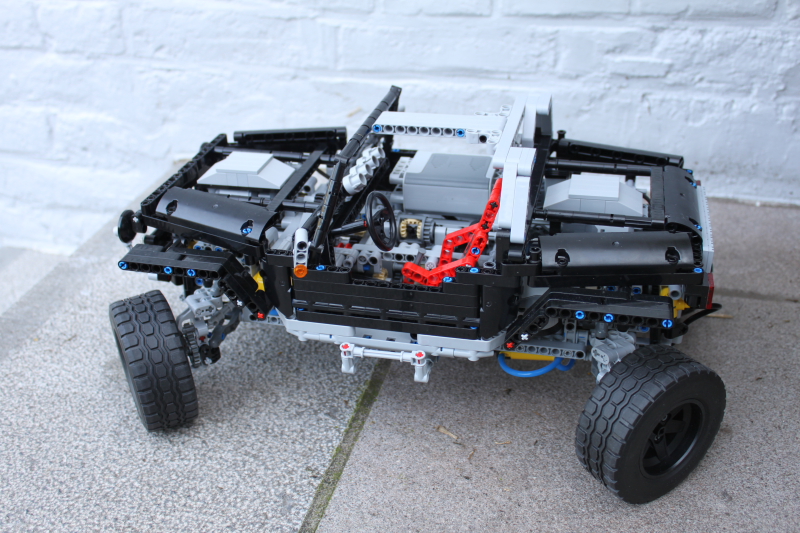
Et voici ce que ça donne en lego :
Mon but était donc bien de faire une reproduction de la vrai jeep, c'est à dire que j'ai cherché à être le plus authentique possible en faisant bien sûr des concessions puisqu'on est en lego.
Avant de m'attaquer à la description des fonctions, je vais commencer par le design, partie sur laquelle j'ai beaucoup travaillé pour obtenir un visuel net et précis. La partie optimisation est aussi importante pour minimiser le poids (1kg900 tout de même),ennemi du bon fonctionnement du véhicule. Bien évidemment, j'ai fait des compromis pour que ça ressemble quand même à quelque chose.
Comme vous le remarquerez peut-être, quelques éléments du design ont été inspiré de la jeep de nk ( comme les panels sur les pans inclinés du capot).
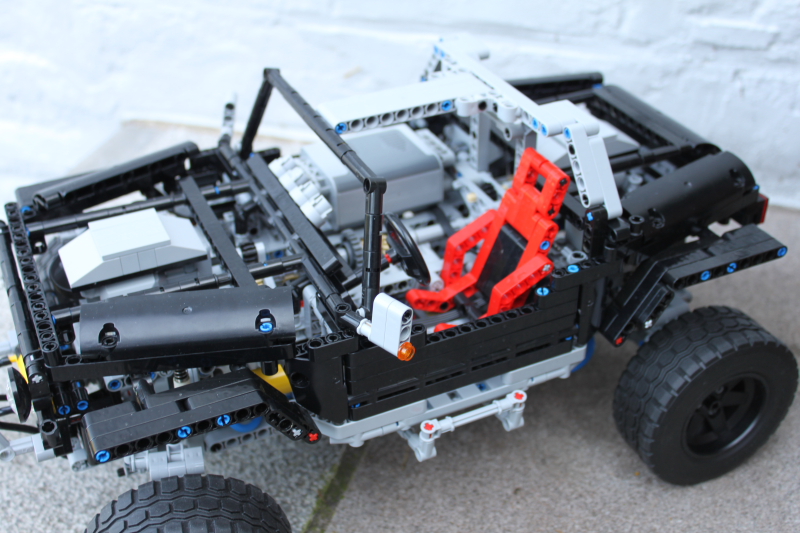
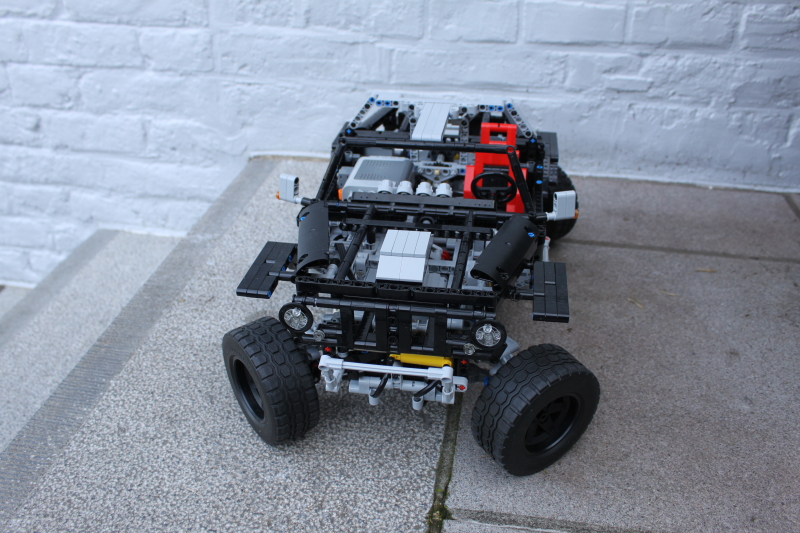
On retrouve bien évidemment l'arceau qui donne ce côté si particulier à la jeep hurricane :
ainsi que les côtés du véhicule faisant un peu buggy
A l'avant, le pare-buffle donne un look agressif à la jeep que j'apprécie particulièrement. Il a été assez dur à intégrer à cause de la place qu'il fallait laisser disponible pour passer enmode zéro turning radius.
Et à l'arrière, la grille se voyant normalement accueillir un magnifique 'jeep' :
(c'est quand même plus beau maintenant que les moteurs L sont cachés )
Un des sièges s'est vu remplacé par le boîtier de piles, certes, peu esthétique mais il n'y avait aucune place ailleurs pour le caser. Je me rattrape sur les récepteurs infra-rouges qui sont plutôt bien dissimulés je pense, tout en restant 'à l'air' pour bien capter les Ir.
Et n'oublions pas le marche-pied amovible :
En bref, je suis vraiment satisfait du design que je trouve bien équilibré.
Passons maintenant à la mécanique avec la liste des fonctions :
-Propulsion intégrale avec boîte de transfert ( deux vitesses) -Direction sur les 2 essieux -Suspension indépendante -Mécanique spéciale pour enclencher le mode zéro turning radious mod.
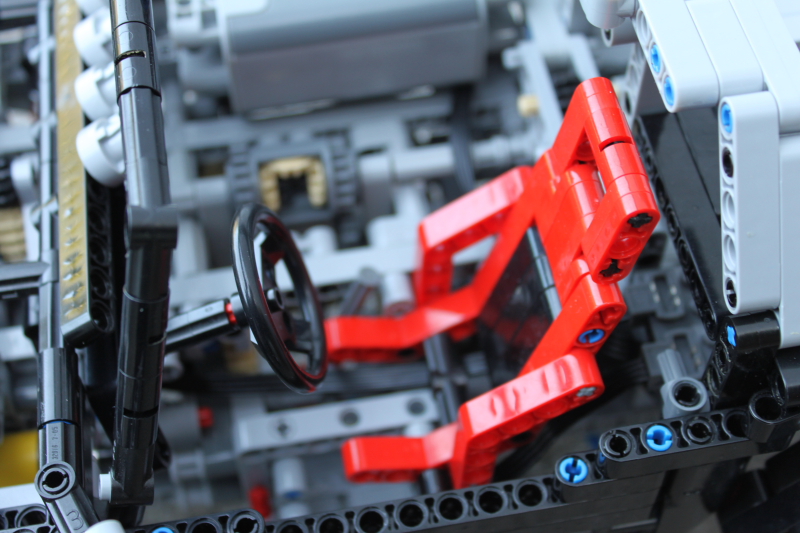
La propulsion se fait donc grâce à deux moteurs L. Un switch power function permet de changer le sens de rotation d'un des moteurs. Au début,j'avais en effet mis d'un côté un renvoi 16t/16t et de l'autre côté un cardan mais les réductions étaient insuffisantes et j'ai donc dû mettre un 12t/20t de chaque côté. Un différentiel situé entre le siège et le boîtier de piles :
(vous voyez aussi le levier de changement de vitesses ici)
permet de compenser la différence de vitesse entre les deux moteurs. Le mouvement descend ensuite vers le différentiel central qui compense la différence de vitesse entre les roues situées à gauche et à droite :
La vitesse entre les roues avants et arrières étant théoriquement la même puisque les roues braquent théoriquement (encore une fois) de la même manière. Ensuite, le mouvement est transféré de chaque côté vers les boîtes de vitesses ( en passant d'un côté par une bv pour changer le sens de rotation ), pour ensuite arriver vers le renvoi 12t/20t et aller dans les roues.
Comme on le voit sur beaucoup d'images, un pont portique dans les roues permet de soulager la chaîne cinématique et les cardans avant :
Le véhicule est au final assez lent mais vu son poids et l'adhérence des roues au sol lorsqu'il tourne sur lui-même, il faut bien ça. En passant, sur la vidéo qui va suivre, le tour a été fait en mode 'rapide' et vous entendrez que les moteurs peinent.
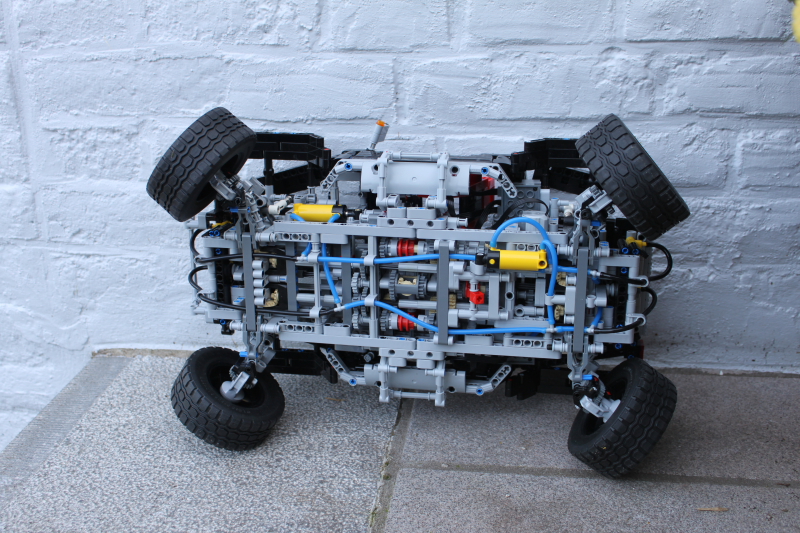
La direction est assurée par un moteur M. A la sortie du moteur, un driving ring permet de découpler le moteur de la chaîne cinématique actionnant la direction pour passer au mode zero turning radius. Ensuite, on a 12t/20t-8t/clutch-8t/24t.L'axe de cette 24t traverse tout le châssis pour aller actionner les deux crémaillères. Sur ces crémaillères sont attachés les vérins pneumatiques permettant le changement de mode et ces vérins bougent donc avec celles-ci. La direction a juste la bonne vitesse. Par contre, la crémaillère bouge beaucoup entre ses guides et il y a donc du jeu entre celle-ci et les moyeux, les roues ne tournent donc pas autant lorsque le véhicule est au sol ou en l'air . De plus, en franchissement, les roues peuvent bouger d'elles-mêmes ce qui est assez gênant. Mais ce n'est que du lego et j'ai pas trouvé mieux
Le changement de mode de direction (normal/zero turning radious) est assuré par pneumatique. Pourquoi avoir choisi cette solution? Parce qu'il faut que le système ( en l'occurrence un vérin pneumatique) qui permet aux roues de prendre cette position : /\ bouge avec la crémaillère. J'aurais pu le faire mécaniquement mais ça aurait été bien plus complexe.De plus, cela me permet d'avoir le changement de sens de rotation d'une paire de roue et la déconnexion du moteur de direction en même temps que les roues prennent leur position particulière et, encore une fois, ça aurait été beaucoup plus compliqué à mettre en place en mécanique.
Peut-être y-a-t-il un autre moyen d'effectuer le changement de mode de direction ( par exemple contrôler les 4roues de manière indépendante, ou que sais-je encore) mais j'ai été inspiré par le fonctionnement de la vraie jeep hurricane ( réalisé par un moteur électrique et vsf qui bouge avec la crémaillère, ce qui n'est bien évidemment pas réalisable en lego).
Le vérin pneumatique s'étend donc et tire les links ( car ils sont connectés de l'autre côté du pivot). Les links se rapprochent du centre du véhicule, ce qui tire aussi les roues vers le centre et elles prennent donc leur position particulière. Puisque la crémaillère n'est pas spécialement au centre lors de cette opération j'ai crée un système qui recentre automatiquement la crémaillère mais, puisque celle-ci est engrenée par une 12t, elle-même connectée au moteur M, il fallait pouvoir déconnecter celui-ci pour que l'axe de la 12t puisse tourner.Ceci est réalisé par le vérin pneumatique que l'on voit sur le côté ici :
qui bouge donc en même temps que les deux autres vérins.
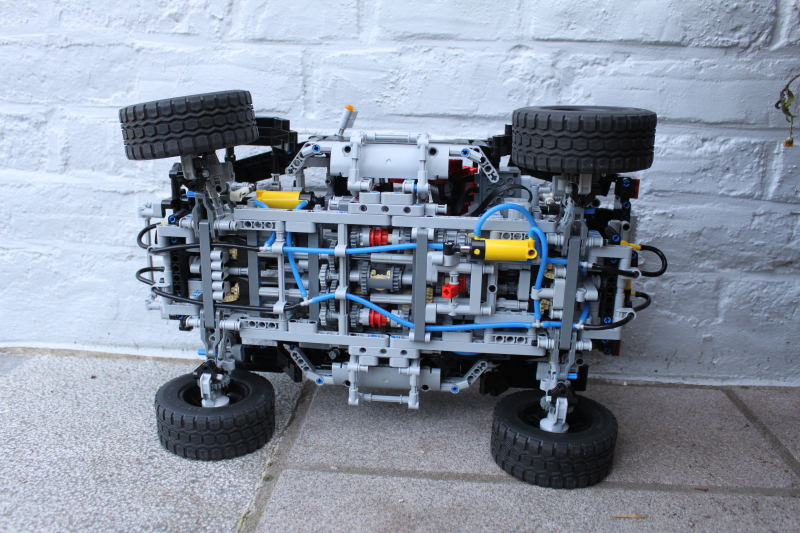
Toujours pendant ce temps, un quatrième vérin pneumatique rentre en action et change, lui, le sens de rotation d'une paire de roue :
dissimulé sous le véhicule car la place manque autre part.Vous remarquerez que je n'ai utilisé que des gros vérins pneumatiques car les petits ne savent pas pousser correctement les driving ring (ou alors il faut vraiment monter la pression et donc attendre trop longtemps). Ici, ça prend déjà pas mal de temps de changer de mode mais on peut rajouter facilement une deuxième pompe ( je ne l'ai pas fait ici pour que les gens qui n'ont qu'une pompe et veulent monter le modèle voient la vitesse à laquelle les mécanismes s'opèrent).
Vous l'avez peut-être remarqué mais les roues tournent d'un angle plus important que ce que les cardans ne peuvent tolérés. Par conséquent, j'ai décalé l'entrée des cardans par rapport au triangle inférieur, de telle sorte que les cardans sont inclinés lorsque les roues sont perpendiculaires au châssis.
Je ne l'ai pas rappelé mais les triangles sont disposés d'une manière bien spécifique pour avoir un angle de chasse positif et un déport réduit ( je joue sur la king pin inclinaison ici, c'est à dire que le pivot du triangle supérieur et celui du triangle inférieur ne sont pas sur une verticale mais bien sur une diagonale, le déport réel étant la distance roue/intersection de cette diagonale avec le sol). Aussi, l'utilisation des portiques de l'unimog a été obligatoire à cause des contraintes énormes à cet endroit ( les moyeux que j'ai crée étaient trop fragiles et il résultait un angle de carrossage exagéré). Les pins bleus sont là en tant que butée, pour éviter que les roues ne touchent quelque chose puisque, comme je l'ai expliqué, il y a trop de jeu entre l'ensemble crémaillère/moyeu.
Le bras de levier du triangle supérieur étant faible, un seul amortisseur suffit ( même si j'ai pris des blancs sur le mien, il s'agit de la même dureté que les jaunes).
Concernant le fonctionnement de la jeep, tous les mécanismes sont fiables, néanmoins, il ne faut pas s'attendre à la jouabilité du 9398. C'est souvent comme ça en lego, il faut faire des compromis entre complexité et jouabilité et ici j'ai choisi la complexité. En effet, j'aurais pu mettre un moteur par paire de roues gauches ou droites, crée un véhicule deux fois plus léger et j'aurais certainement eu quelque chose de plus fonctionnel mais ça n'aurait eu que peu d'intérêt à mon goût et n'aurait pas eu le mérite de s’appeler jeep hurricane.
Le principal bémol du véhicule est le jeu dans la direction qui fait que les roues peuvent bouger indépendamment de la crémaillère.Il faudrait essayer de guider plus rigidement la crémaillère car c'est de là que vient le plus de jeu. Remplacer les suspensions indépendantes par des essieux rigides pour ne pas utiliser de link réduirait aussi un le jeu ( bien que faiblement).
Le véhicule manque aussi un peu de puissance en rotation à cause de son poids et de l'adhérence au sol ( à noter qu'il tourne un peu mieux avec les pneus du 9398-raison pour laquelle je les ai utilisé dans la notice- mais esthétiquement je préfère ceux-ci).
En conclusion, je suis très satisfait du modèle. Son look me plait vraiment, épuré et reconnaissable au premier coup d’œil. Mais ce qui me réjouit le plus c'est d'avoir fait la première jeep hurricane lego vraiment fonctionnelle ( à ma connaissance) et basée sur le fonctionnement d'une vraie (donc pas juste une bête mécanique comme un bobcat quoi...). Évidemment, il ne faut pas s'attendre aux performances du 9398 ( mais ce n'est pas non plus le but du véhicule, je préfère juste vous prévenir parce que je vous ai dit au début que la vraie jeep a été présenté comme le meilleur véhicule tout terrain de tous les temps et vous vous attendez peut-être à ce que ma jeep soit pareille ). Néanmoins, il y a vraiment moyen de s'amuser avec la voiture.
Voici la vidéo :
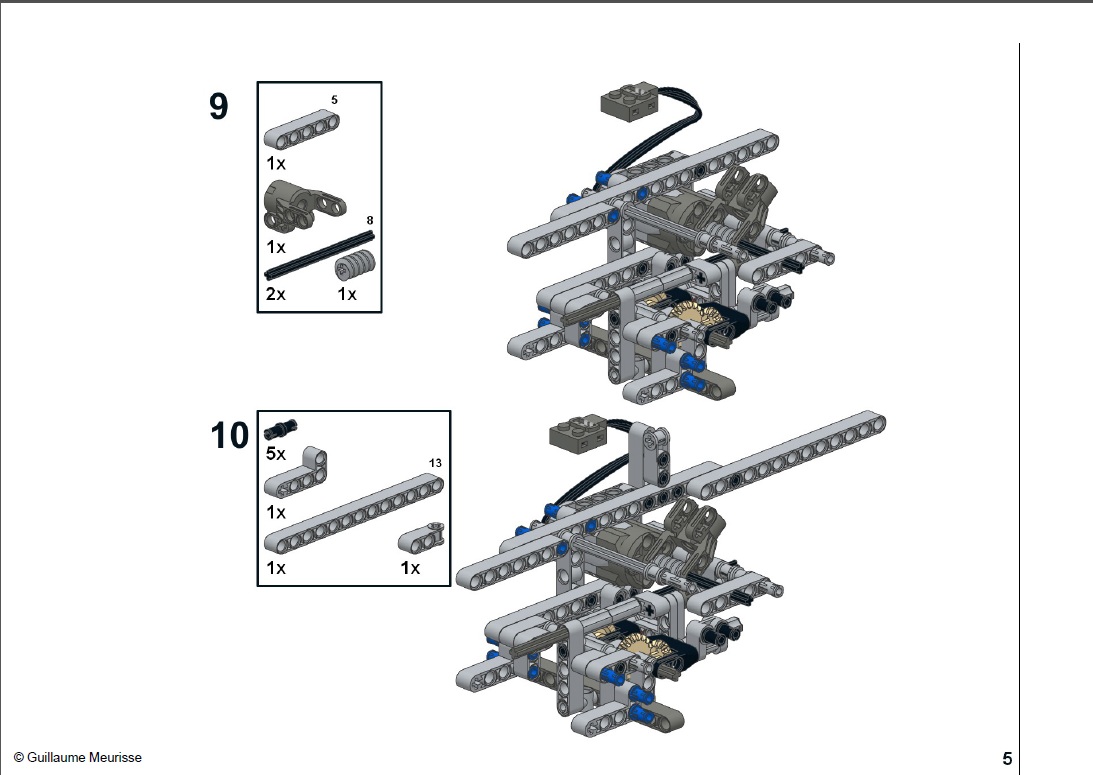
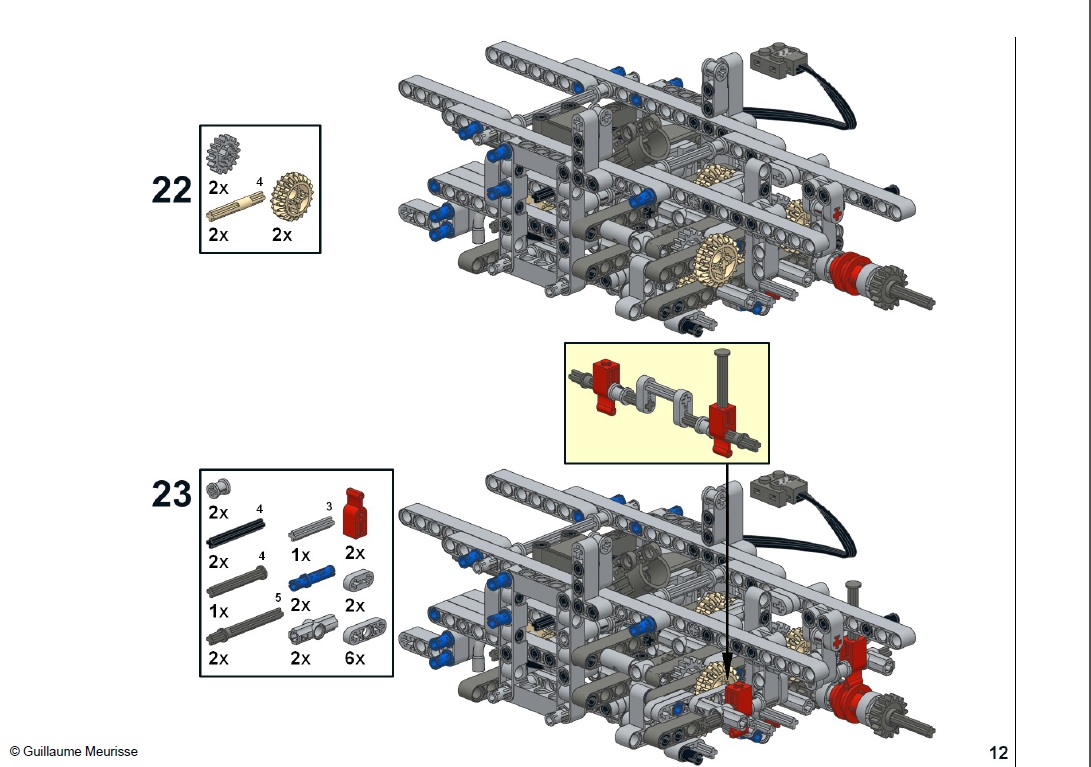
Dernière chose, et non des moindres, j'ai crée la notice pour que n'importe qui puisse reproduire le modèle. J'ai longtemps hésité sur le prix à mettre et j'ai finalement décidé de la faire payer 9euros. Pas 10 car il y a encore une marge de progression par rapport à celles de nk et de jurgen mais j'ai quand même passé un temps monstrueux dessus ( oui, en partie parce que j'avais jamais manié les programmes mais aussi parce qu'ils sont buggés) et la notice est tout de même d'un très bon niveau. Pour vous donner une idée, j'ai dû passé 150heures à construire le modèle et peut-être le double à faire la notice mais je n'ai aucun regret car c'est une réelle satisfaction de savoir que j'ai réussi à le faire !c'est vraiment la cerise sur le gâteau pour moi une notice. C'était la première fois que j'en réalisais une du début jusqu'à la fin donc j'espère qu'il n'y a pas d'erreurs ( normalement non puisque j'ai remonté le modèle en la suivant mais comme j'ai modifié des trucs depuis pour que le montage se fasse plus facilement, on ne sait jamais !) Voici quelques vues extraites du pdf :
Me contacter à [email protected] si vous êtes intéressés. Payement des 9euros par paypal ou iban, au choix. Je vous enverrai ensuite le fichier pdf. Évidemment, je vous fait confiance pour ne pas aller le filer à tout le monde !
Une page qui se tourne sans aucun regrets car j'ai grande envie de passer à autre chose !
A vous !
Dernière édition par GuilliuG le Sam Nov 03, 2012 7:45 pm, édité 3 fois au total.
Il y a juste un détail qui me choc, dans la vidéo lorsque la voiture pivote sur place on voie que les pneus ripent et que les roues non pas le même angle de braquage.
« Pour s'améliorer, il faut changer. Donc, pour être parfait, il faut avoir changé souvent. » de Winston Churchill
Bravo ! Très belle review d'un très beau moc ! Y'a pas à dire, ta jeep hurricane une franche réussite aussi bien mécanique qu'esthétique
Par contre, quand je vois le résultat du zero turning radius, je peux pas m’empêcher de me dire: "tout ça pour ça" Je suis peut être un peu dur. Mais objectivement, en pratique ça ne sert pas à grand chose. Je veux dire par là que par exemple, le temps de changer de mode puis de tourner, t'as largement le temps de faire demi tour en manœuvrant... Et puis dans la vidéo, on voit que le véhicule a un peu du mal à tourner dans ce mode.
Après ça enlève rien à la performance d'avoir pu aboutir à un truc qui marche. Parce que je comprend bien que ton objectif ça puisse être la beauté de la mécanique, au delà de la performance. Et dans ce sens là t'as carrément réussit ton coup.
Eh bien, toutes mes félicitations, ce MOC est dantesque ! Au final tu as su rendre très simple une construction qui s'annonçait compliquée, je veux dire par là que les mécanismes sont facilement compréhensibles, et ton MOC pourrait servir de modèle réduit pour expliquer le concept car.
Et ça me donne envie d'essayer, de faire une version plus jouable, sûrement moins complexe mais pour voir quel fun ça peut apporter d'avoir un truc comme ça qui réagit rapidement.
Très beau MOC. Et je dirai même plutôt, très beau projet.
C'est presque plus ça que je retiendrai. Tu as posé ton idée, tu as tourné autour de ton idée, tu as réalisé ton idée, et puis tu l'as documentée. C'est une très belle démarche.
Concernant le MOC lui-même, il est très bien fait, fonctionnel, et complexe. Y'a quand même 2 points sur lesquels j'émettrai une réserve. Le pneum tout d'abord. Alors changer la direction par pneum, je veux bien te croire si tu dis que c'est fonctionnel, et tout et tout, mais ça me chagrine. Pour moi, ça aurait vraiment plus de gueule si c'était fait mécaniquement, comme Nathanaël. Et deuxièmement, tout ce qui est recentrage de la direction. Tu n'y es pas pour grand chose, mais la sortie du nouveau servomoteur rend, de fait, un peu dépassé la conception. J'entends par là que si un Hurricane était conçu à partir d'aujourd'hui, il est évident que le servomoteur PFS serait une solution de premier choix. Ecueil possible quand on est sur un long projet ; les technologies évoluent.
@jacques27 : tu as raison, les roues ne gardent pas toutes la même position. Comme je l'ai expliqué, il y a du jeu entre le moyeu et la crémaillère et les contraintes au niveau des roues sont importantes
@pipasseyoyo : tout à fait d'accord que tu peux faire une voiture avec juste propulsion et direction et faire ton demi-tour trois fois plus vite qu'ici mais ce n'est pas la question pour moi. L'intérêt du MOC réside justement dans cette caractéristique particulière et le challenge était de réussir à l'intégrer !
@cypr_21 : content de te donner des idées ! J'ai aussi pour projet de faire un autre véhicule avec cette caractéristique de tourner sur place mais en plus simple pour que ça fonctionne plus vite. Mais ce ne sera pas avant quelque temps !
@Anio : c'est marrant que tu parles justement du servomoteur car j'ai commencé par l'utiliser dans la direction ( prototype 1 et 2) puis j'abandonné l'idée parce que ce n'était pas la meilleure solution.Y a pas à dire, ce servo n'est pas assez coupleux. J'ai même pensé en utiliser deux pour l'essieu avant/arrière et j'aurais pu ainsi passer en mode normal/crabe/un seul essieu directeur mais bon je savais que j'allais faire une notice et deux servo, ça aurait refroidit pas mal de monde.Dis-toi que si j'ai utilisé des moteurs L, j'avais déjà le servo dans mon stock . Comme expliqué, la solution de NK n'est pas idéale pour avoir une jeep qui fonctionne vraiment car les links prennent une mauvaise position et ne savent plus retenir les efforts perpendiculaires au châssis. Et par ailleurs, le pneumatique ici est aussi signe de simplicité pour moi car si j'avais dû faire la même chose en mécanique ça aurait été bien plus complexe.







 ) où je maîtrisais pas trop leur modélisation. Maintenant, je pourrais les faire moi-même mais ça le fait pas trop de demander à quelqu'un de les modéliser et puis que je fasse tout moi-même
) où je maîtrisais pas trop leur modélisation. Maintenant, je pourrais les faire moi-même mais ça le fait pas trop de demander à quelqu'un de les modéliser et puis que je fasse tout moi-même .gif ":)")




.gif ";)")



 .
.














 .
.

.gif "8)")






