





Globalement, les fonctions sont assez simples, rendant le MOC bien jouable. Néanmoins, le système de direction est assez complexe et présente un peu de jeu. Certes, mon telehander n'utilise ni pfs ni bv, mais il n'a pas été simple à concevoir pour autant.
Alors, comme fonctions, on a :
-Moteur factice entraîné par l'essieu arrière
-Direction sur les deux essieux mode normal
-Direction sur les deux essieux mode crabe
-Volant fonctionnel
-Stabilisateurs frontaux avec point de rebroussement
-Bras
-Extension du bras
-Fourche

On commence par le moteur factice, avec deux photos illustrant la mécanique :


C'est un L2, car très peu de place disponible.
Intéressons nous maintenant à la direction :
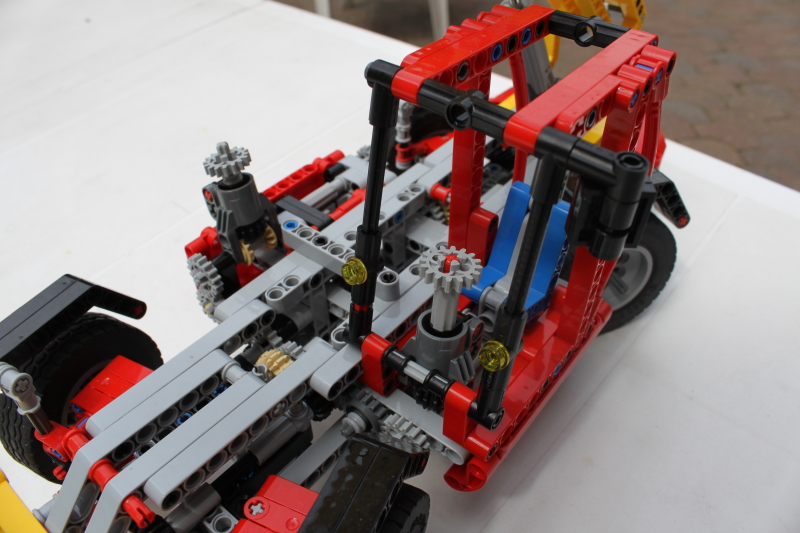
Celle-ci est contrôlée grâce à la 16t au-dessus de la base de vérin mécanique. En tournant cette 16t, les deux roues braquent de manière opposée ( mode normal), tandis qu'en inclinant le bloc, les deux roues tournent identiquement et on obtient le mode crabe. Cette fonctionnalité permet d'avoir une excellente jouabilité pour aller chercher des palettes et c'est vraiment plaisant de jouer avec. Le système est identique à celui présent sur mon Xérion.
Dès qu'on actionne la direction, le volant tourne ( toujours à gauche quand les roues tournent à gauche et inversement). Bon, je suis d'accord, la 16T c'est pas top mais le volant présent dans le set est beaucoup trop gros.


Pour lever le bras, un vérin mécanique fait l'affaire. J'ai mis une manivelle et pas un pignon pour lever plus vite le bras ( aucune augmentation de vitesse dans la chaîne cinématique). Vous le verrez, ce choix fait que l'engin bouge assez quand on ne le tient pas et qu'il est posé sur ces stabs).
Les stabilisateurs en action ( point de rebroussement clairement visible) :

L'extension du bras est on ne peut plus simple. En effet, l'inventaire ne permet pas de faire autre chose ( pas de crémaillères assez longues). Il suffit donc de tirer la deuxième section du bras à la main et de la bloquer avec un axe. Simple mais efficace.

Ici, on voit l'axe de 6 au bout :

Pour la fourche, on a une vis-sans-fin sur une 8t, et le tour est réglé (inspiré du 8295)


La palette est simplement constituée d'un panel avec deux poutres de 5 noires.

Concernant le design, pas grand chose à dire, j'ai cherché à optimiser un maximum la construction pour avoir un rendu propre et net. L'harmonisation des couleurs joue beaucoup là-dedans aussi.Aller, une dernière photo pour la route :

Et voici la vidéo :
C'est bête, j'avais fait une bien meilleure vidéo mais oublié de l'uploader sur le pc et effacé sur l'apn
 Néanmoins, on voit tout sur celle ci-dessus et c'est le principal
Néanmoins, on voit tout sur celle ci-dessus et c'est le principal .gif ":)")
En conclusion, je me suis bien éclaté à construire ce telehandler. J'ai apprécié le challenge de construire uniquement avec les pièces d'un set ( bien que d'habitude je préfère me pencher sur mes projets avec toutes mes pièces) et je pense avoir réussi mon pari : à savoir faire un engin manuel bien fonctionnel ( j'ai d'ailleurs passé quelques heures avec ma petite palette
 ). Bonne chance à tous pour le concours !
). Bonne chance à tous pour le concours !
.gif ";)") , j'aime beaucoup le système de direction que tu as utilisé sur ton Xérion et sur ce moc.
, j'aime beaucoup le système de direction que tu as utilisé sur ton Xérion et sur ce moc. , encore un grand bravo !.
, encore un grand bravo !.

