



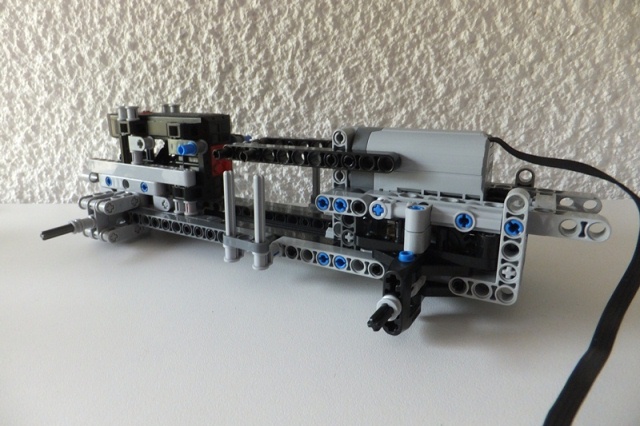
Je me suis lancé dans un nouveau projet. Echelle assez réduite, sur la base de roues de 56mm.
La motivation principale, c'est d'essayer le couple Récepteur V2 - Moteur RC 5292.
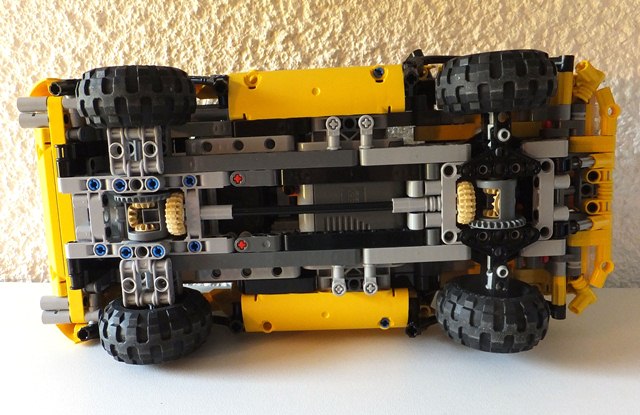
Pour tester cela dans différentes configurations, le véhicule est 4 roues motrices et il est possible d'enlever l'entrainement sur l'un ou l'autre des essieux, en retirant quelques pièces.
Pour l'instant, le châssis est prêt:

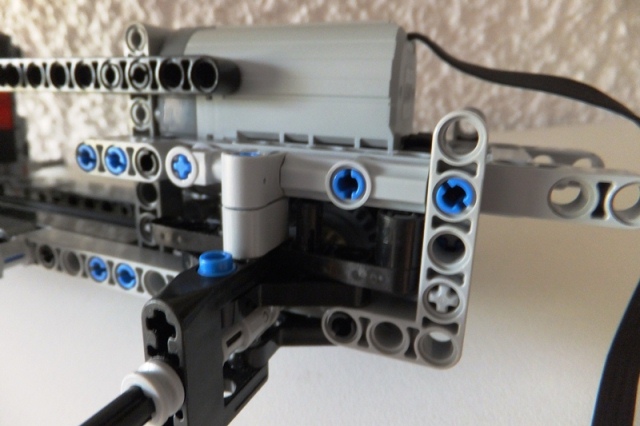
La direction se fait avec un servomoteur.
Le système de direction est un peu light, mais bon c'est un 4x4 fait pour rouler sur le carrelage de la maison ^^
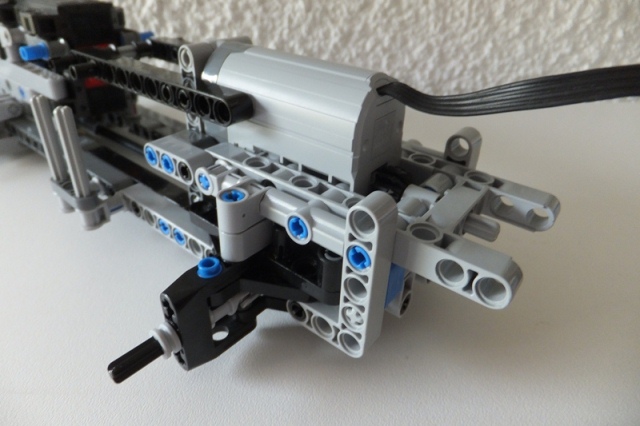
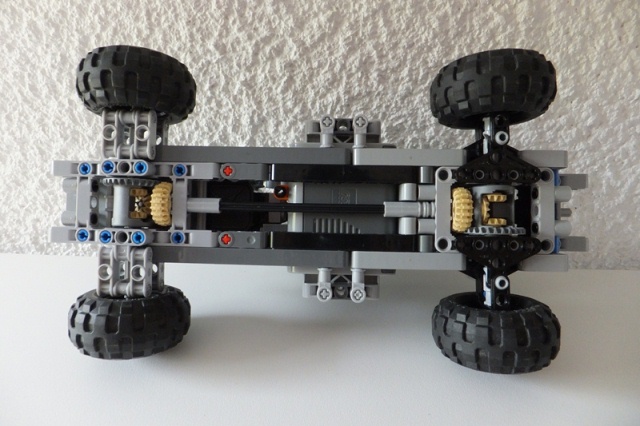
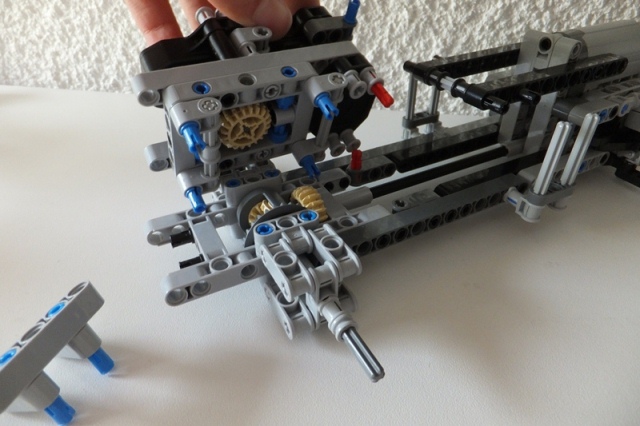
La propulsion se fait avec un moteur RC, entrainant directement le différentiel arrière par le haut, via une 20t. Ensuite un arbre amène la motricité sur l'essieu avant via 2 20t.
J'ai minimiser le nombre de portés d'axe sur toute la chaîne cinématique de la propulsion pour éviter un maximum les pertes par frottements.
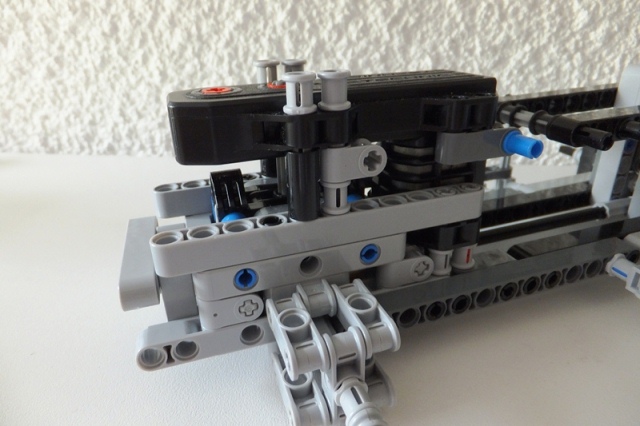
Finalement, il y a deux récepteurs:
- le V2 dédié au moteur RC.
- le V1 pour le servomoteur et une autre connection au moteur RC.
Chassis nu comme ça, les performances sont vraiment pas mal !
Sinon, je trouve que le servomoteur manque un peu de réactivité, particulièrement quand on fait gauche -> droite ou l'inverse. Après, c'est pas méchant, un servomoteur lego, ça reste trop d'la balle

Voilà, prochaine étape, la carrosserie.
L'objectif étant la vitesse, elle sera fixée par seulement quelques connecteurs au châssis. Cela permettra de l'enlever rapidement pour alléger le véhicule.
Je compte essayer de reproduire un 4x4 de rallye raid, type Bowler Nemesis:

A bientôt pour la suite







 à part la crémaillère qu'on aperçoit. Je ne voit pas trop comment les roues peuvent tourner.
à part la crémaillère qu'on aperçoit. Je ne voit pas trop comment les roues peuvent tourner.







.gif ";)")
 ).
).









{kind=link}