


Déjà commençons par le modèle original :

Comparaison avec mon modèle :

Les vérins :
Je commence par eux car vu l'engouement de tous a ce sujet :mrgreen: je me lance!
D'abord à consulter ce LIEN.
On prend un beau vérin tout neuf, on l'ouvre, on démonte tout, et on se sépare de la tige et du corps jaune dont on aura enlevé la partie inférieure.

Ensuite il faut acheter du tube aluminium ou laiton d'un diamètre intérieur de 12mm et extérieur de 16mm. Moi j'ai pris du 14mm extérieur ce qui évite d'usiner la partie supérieure et inférieur. Pour la tige, faut de l'aluminium plein de 5mm de diamètre et faut l'usiner aux extrémités comme l'original. Pour ce faire, je conseil un dremel, et fabriquer un tour avec deux poutres lego et un moteur, on fait tourner tout ça et on usine....
Puis avec de la bonne colle on assemble le tout, sans oublier de bien graisser l'intérieur.
Dimensions :
Trouvez ICI ma base de travail, avec lequel j'ai établi une échelle (1/26ème) pour réaliser mon modèle au plus proche du réel. J'y ai choisit une flèche de 8.4m avec balancier de 5.6m et des tuiles de 750mm.
Mes cotes finies sont :
- Poids piles comprises + télécommande: plus de 4Kg
Longueur châssis : 24.5cm / 7.25m
Entre axe roue folle/barbotin : 19.5cm / 5.07m
Largeur châssis : 17cm / 4.2m
Hauteur bras déployé à fond :60cm
Balancier : 20.5cm / 5.6m
Garde au sol : 2.3cm / 0.89m (pas réussi à faire mieux)
Échelle du modèle : 1/26ème
Eclairage :
J'ai inséré 2 paires de led officielles Lego; 1 au dessus de la cabine, et 1 sur le bras.
J'ai bricolé moi même dans une brique 2x3 2led forte luminosité avec une résistance pour l'adapter sur le 9V.
On voit bien sur cette photo la différence entre les led lego qui sont dans les tons froid (bleu blanc) et les mienne dans les tons chaud (jaune)

Châssis :
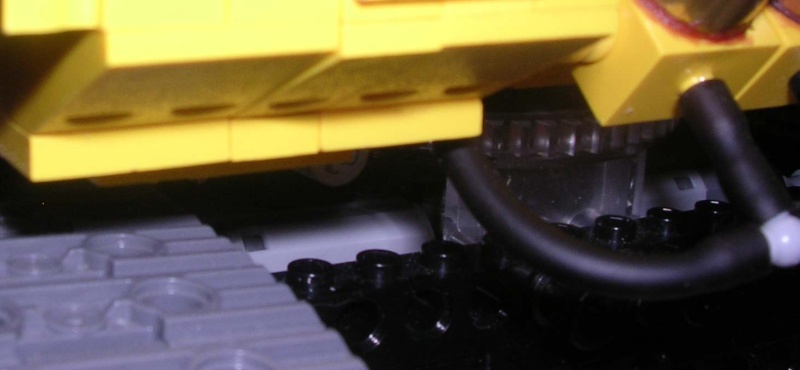
Les chenilles sont entrainées par 2 moteurs M qui sont logés dans le châssis directement suivi d'une série d'engrenages pour la réduction.
Voici pour les engrenages et on peut voir aussi les petits galet pour répartir la charge

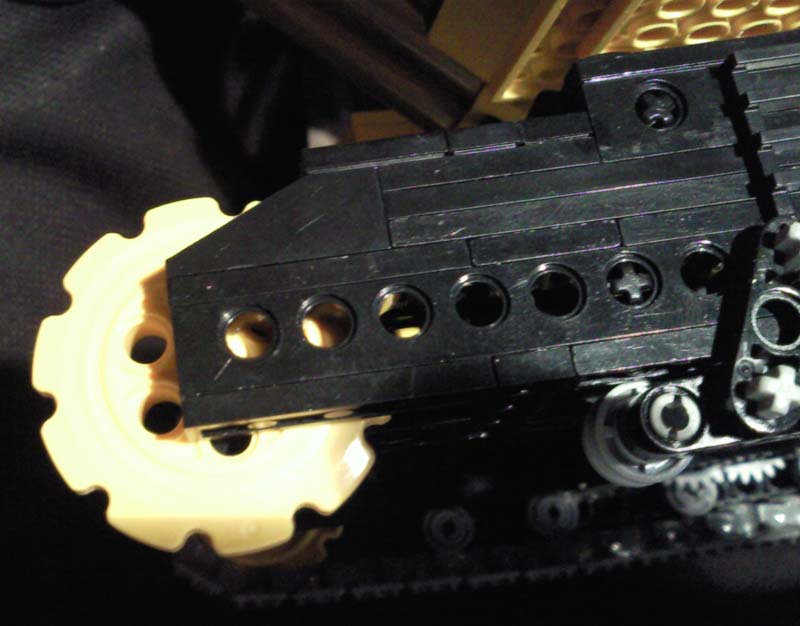
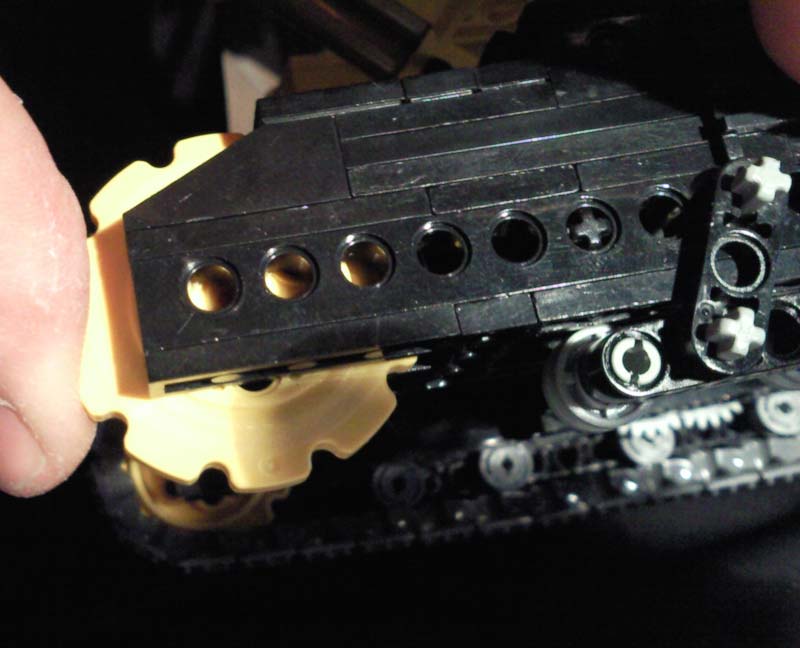
Remarquez aussi sur la photo la roue jaune que j'ai du usiner pour que ça puisse entrer dans un espace de 2 tenons!
Voilà pour les moteurs :

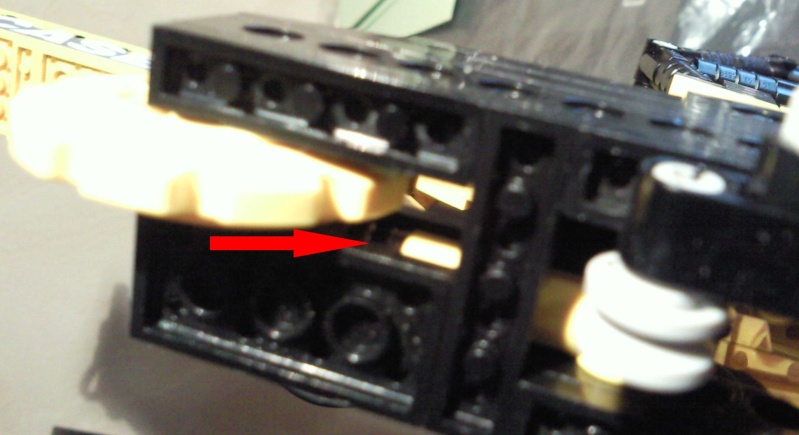
Autre chose dont je suis pas peu fier, c'est que sur chaque chenille, il y a un galet tendeur. Voyez plutôt :
Tourelle :
Voilà un zoom sur les récepteur I.R.

Voilà l'intérieur de la bécane:

En fait, il y a pas grand chose d'exceptionnel la dedans. On peut voir le moteur de rotation de la tourelle, le boitier piles qui alimentent les 2 récepteurs et qui fait contre poids.
Commande :

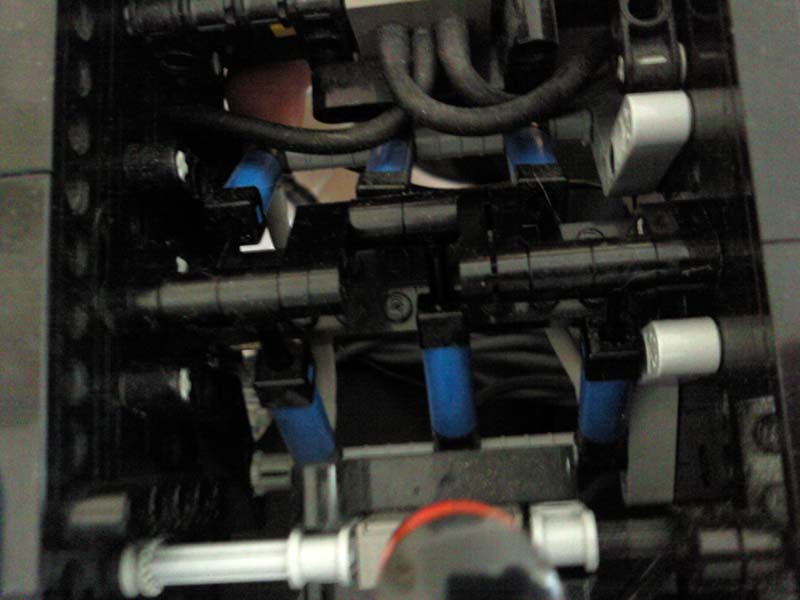
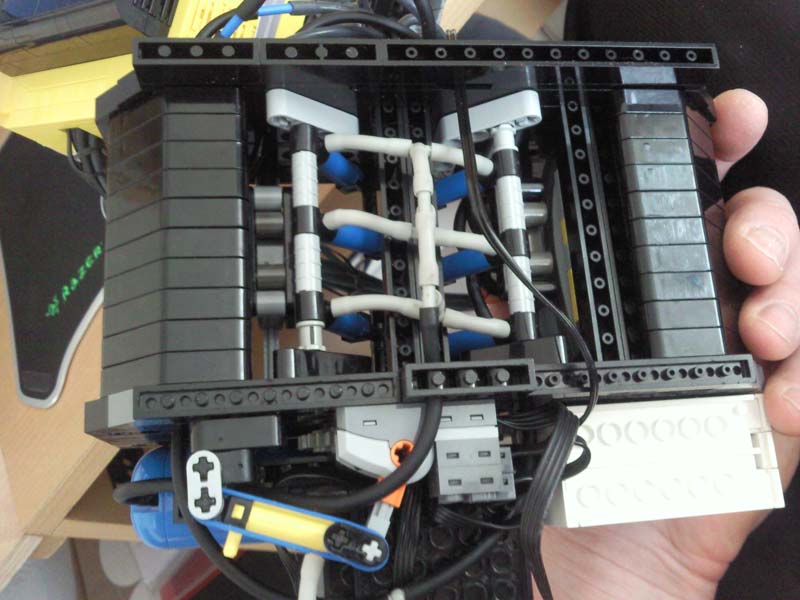
Cette commande comporte 3 inverseurs pneumatiques, 6 mini pompes montées en V et les 2 moteurs pour entrainer tout ça. On voit aussi le limiteur de pression monté sur le nouveau interrupteur.
Voici pour les vidéos :
Les vérin exercent une poussé sur des objets qui pèsent 10Kg!
C'est ma première "vraie" réalisation alors soyez indulgent et comme on me la déjà dit, il faut que je vois pour donner des mouvement de vérin plus lents, plus fluides, je verrais ce que je peux faire....
Mon second projet (en cours) la même pelle mais à l'échelle 1/20ème pour peaufiner les détail et améliorer l'ensemble.
J'oubliais ma galerie de photos ICI






.gif ";)")






















 ) mais bon, en même temps, il est vrai que, niveau verins, ça ajoute vraiment beaucoup au MOC
) mais bon, en même temps, il est vrai que, niveau verins, ça ajoute vraiment beaucoup au MOC .gif ":)") par contre, pour les barbotins
par contre, pour les barbotins  perso, j'aurais préféré un train de chenille plus simple mais sans modification de pièce
perso, j'aurais préféré un train de chenille plus simple mais sans modification de pièce 








