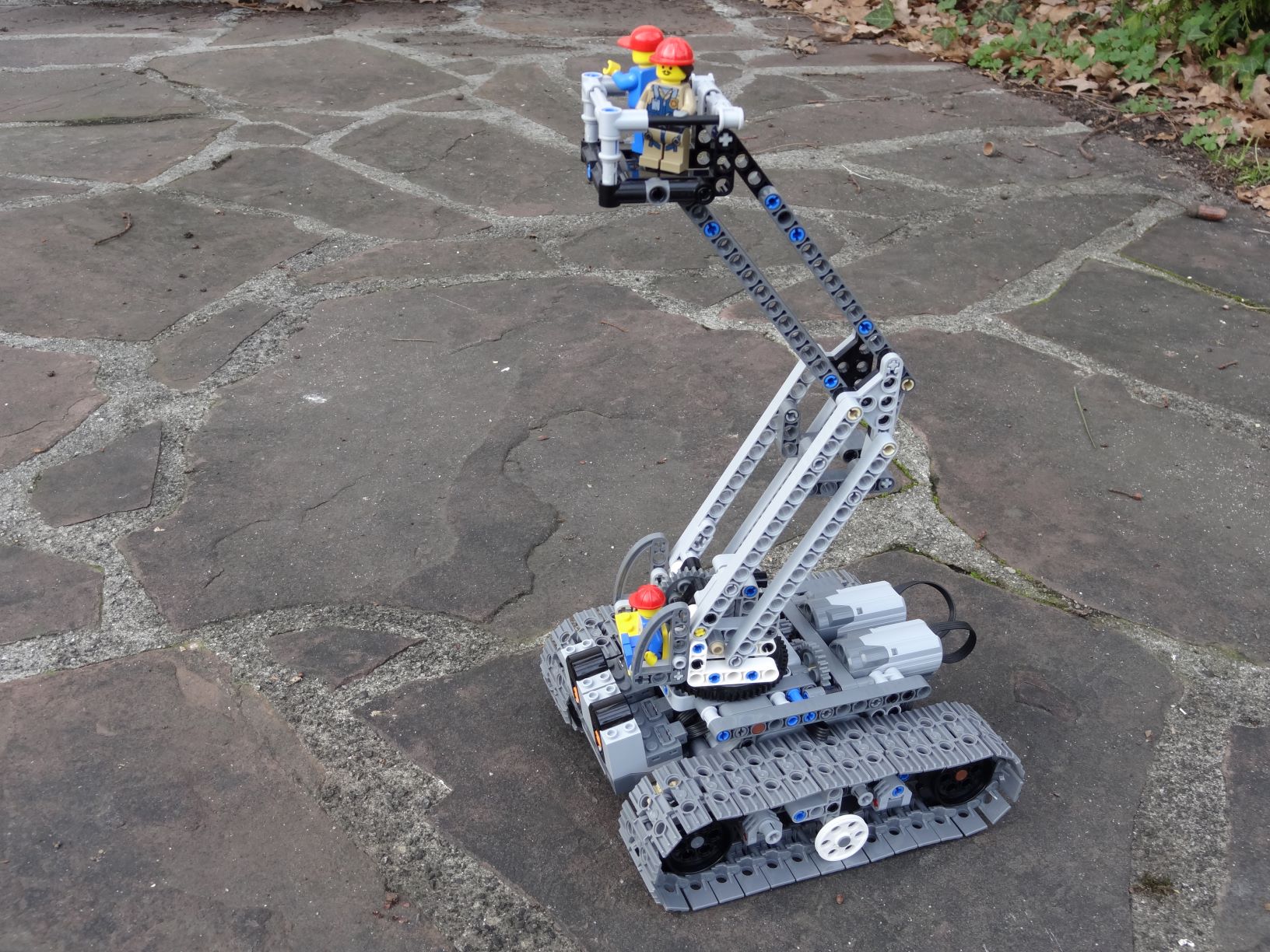
J'ai construit un petit frère à mon robot avec comme objectif de réaliser la plus petite plateforme motorisée sur chenille possible.
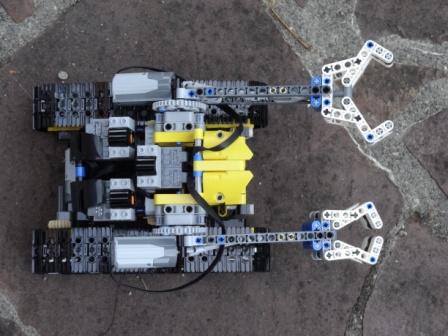
Cette nacelle comporte quatre moteurs M :
- Les chenilles sont indépendantes (pas de problème, c'est bien maîtrisé)
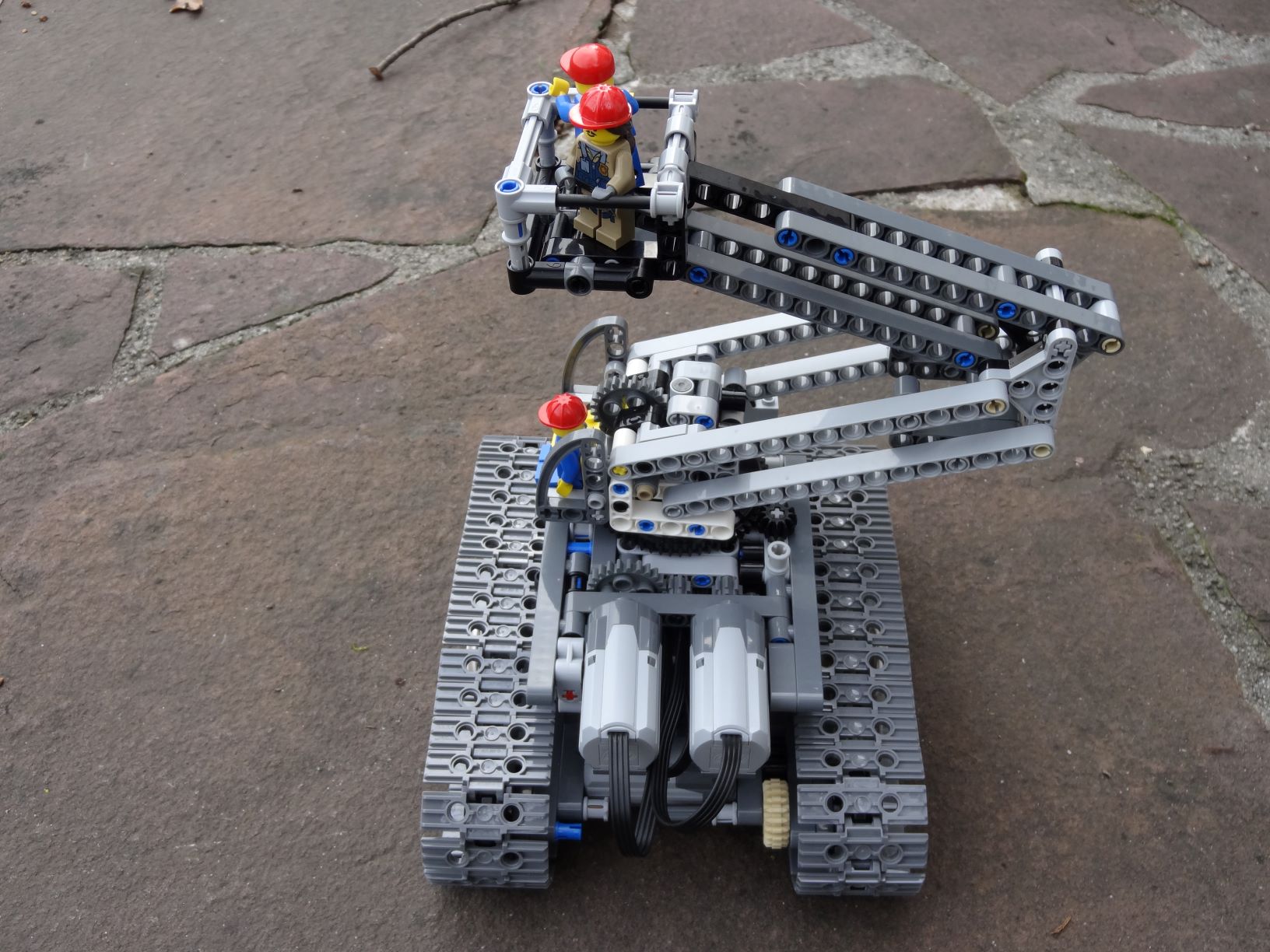
- La plateforme tourne lentement sur 360 degrés. J'ai un peu galéré avec pour tenir le mécanisme dans le nombre de tenons que j'avais choisi.
- Le bras s’élève à la verticale en respectant la position de la nacelle. L'élévation est plus rapide en haut de course. Cela viens de l'effort à fournir pour décoller le bras de l'horizontal.
Je suis assez content car la jouabilité est bonne.


Je note des limites :
- Les deux récepteurs IR sont repoussés par le volume des câbles qui occupent finalement plus de place que je pensais.
- Le conducteur n'est pas protégé et sa fixation reste fragile.
A vos remarques.









.gif ":)")




