




Je vous montre mon premier trial truck
.gif ":)")
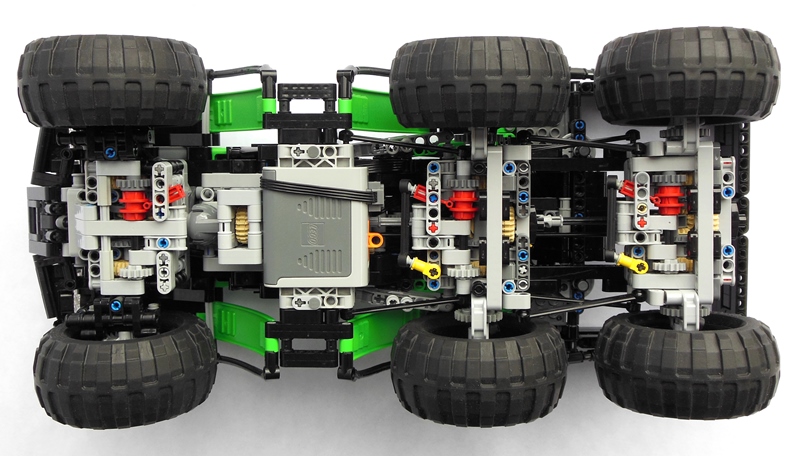
L'objectif était de réaliser un 6x6 sur roues de 94.8mm, avec des blocages de différentiels et des suspensions sans ressort qui permettent aux roues d'être librement en contact avec le sol.


Le choix d'un quad 6x6 s'est imposé dans un but de compacité et de légèreté.
Bien sûr, cet engin ne colle pas avec le système de suspension que je veux utiliser (suspensions indépendantes sur les quads classiques / essieux rigides pour la solidité en Lego).
Ce MOC ne se veut pas la reproduction réaliste d'un quad 6x6. Il opte pour des solutions mécaniques performantes en Lego, avec une apparence de quad.

La propulsion est confiée à 2 moteurs XL.
Ça semblait surdimensionné au départ. La construction a voulu que ce ne soit pas plus difficile d'en mettre 2 qu'un seul, alors "autant les mettre" je me suis dis.
Finalement avec 6 grosses roues motrices et une transmission complexe, heureusement qu'il est là le 2ème XL !
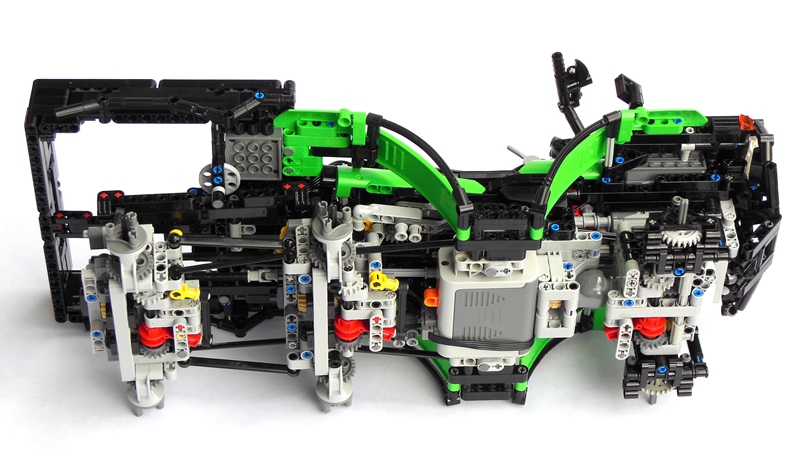
Les indispensables ponts portiques sont là pour soulager les cardans et les différentiels, contrairement à un vrai quad aussi
.gif ";)")
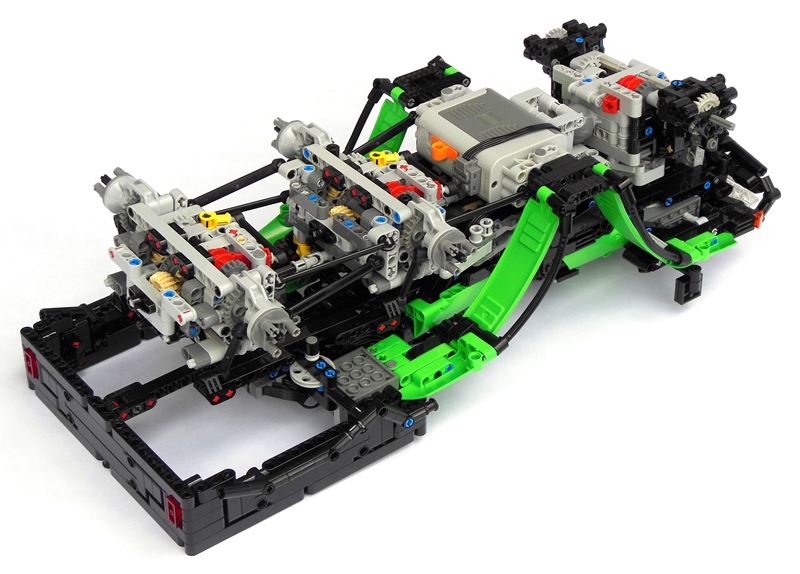

La direction est actionnée par 1 moteur M.
Un servomoteur intégré sur l'essieu avant semble le plus logique. Mais pas la place ! Alors on a un moteur M déporté dans le châssis.
Et ce n'est pas plus mal. En TT, un moteur M c'est : + de précision, + de couple, et pas nécessairement besoin de la réactivité d'un servo. Egalement, l'angle de braquage actuel (environ 45°) aurait été inatteignable avec un servo.
L'utilisation d'un moteur M est difficilement compatible avec un renvoi de la direction au guidon. Cela manquera sans doute aux yeux de certains. J'ai aussi privilégié l'intégration des 2 moteurs XL, ils bloquent la possibilité d'une transmission de la direction au guidon.


Le blocage des différentiels est commandé par 1 moteur M.
Le mécanisme bloque les 3 essieux en même temps. Un blocage indépendant serait inutile, et puis cette fonction a déjà été assez complexe à intégrer comme ça...
En effet, le système doit fermer/ouvrir chacun des 3 driving rings de manière synchronisée. Et cela en suivant le mouvement des essieux suspendus sans interférer sur la position des driving rings, pas simple pour le couple d'essieu arrière...
Sur l'essieu avant, entre la suspension, la transmission, la direction, les XL de la propulsion, intégrer le blocage n'a pas été simple du tout non plus. Bon le blocage est surement dispensable à l'avant, mais je voulais aller jusqu'au bout ^^
La BV est commutée via 1 moteur M.
Elle ne faisait pas partie de mes objectifs initialement. Mais propulsion + direction + blocage de diff demandent 2 IRs, et n'occupent que 3 sorties. Donc dès le départ je savais qu'il resterait une sortie IR libre. Le choix de la dédier à la commande d'une BV s'est imposé en cours de construction. C'est une fonction utile sur un TT, plus qu'un treuil ou le levage de la benne par exemple.
On a donc une BV 2 rapports (1:1 ou 1.67:1) via un nouveau driving ring.


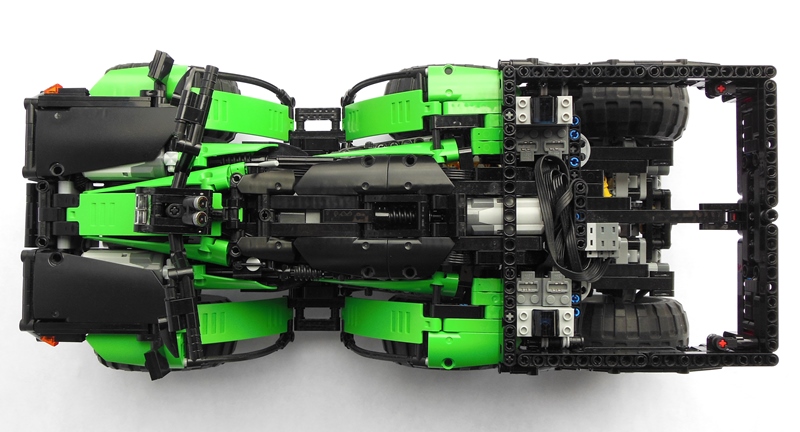
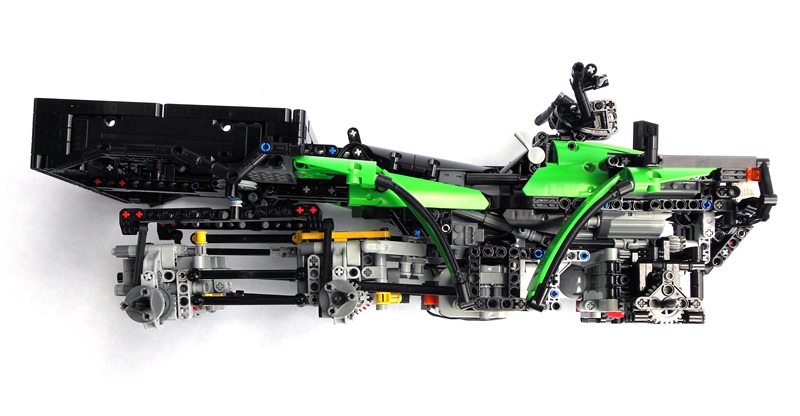
Les suspensions n'utilisent aucun ressort.
Les 3 essieux sont rigides. Les essieux arrières sont couplés en série avec 2x4 liens rotules 9l par rapport au châssis. Cette technique présente un avantage, les 2 arbres de transmission mobiles avec cardans ont une longueur fixe, pas besoin d'arbres télescopiques. Coté gauche (idem coté droit) un balancier lie les 2 essieux. Par construction les roues arrières suivent le terrain sans être limitées par des ressorts, tant que le débattement des suspensions le permet. Le tangage ou l'écrasement sous le poids du quad sont impossibles. Cela couplé avec le centre de gravité bas (position de la BB et des XL) apporte une grande stabilité.
Le couple d'essieux arrières forme donc pour le quad un point d'appui stable qui s'adapte au terrain. A partir de là, l'essieu avant peut simplement être pendulaire libre. Ceci garanti qu'il soit également toujours en contact avec le sol, tant que le débattement le permet.



Détail de la mécanique (GIF 8Mo)
Vidéo :
Au final, il est pas ultra performant ce TT, parce qu'un peu lourd (environ 1kg800), la transmission est complexe aussi... Mais il était bien casse-tête à construire, comme j'aime !
Questions, critiques, remarques, n'hésitez pas
























