


Voici mon entrée pour le concours 29:



I - Design de l'appareil
Le sujet du concours stipule que l'hélicoptère doit être du type skycrane. Ces hélicoptères sont adaptés au transport de charges lourdes, que ce soit dans la soute, accrochées au fuselage ou suspendues à une ou plusieurs élingues, selon le modèle. Certains appareils sont conçus spécifiquement pour ça, notamment le MIL MI-10 ci-dessous ou le Sykorsky CH-54 objet de ce concours.

Le sujet du concours montrant une photo du CH-54, c'est donc ce modèle en particuliers qu'il fallait créer. Or cet hélicoptère a une esthétique très particulière, héritée du cahier des charges imposé par l'armée américaine lors de l'appel d'offre initial. A savoir la possibilité de glisser sous l'appareil un conteneur militaire de taille standard à cet époque. Je cite la phrase ci-dessous issue de la page Wikipedia de l'appareil:
Un conteneur standard (Universal Military Container) de 8,36 mètres de long sur 2,89 m de large et 1,98 m de haut s'inscrivait exactement sous le CH-54.
C'était pour moi un point essentiel durant la création du MOC: que le conteneur ne soit pas juste un truc qui pandouille sous l'appareil, dans la mesure où les dimensions de ce conteneur ont eu à l'origine un rôle déterminant dans la conception de l'hélicoptère.
Venons-en au choix de l'appareil: ce sera un hôpital mobile. C’était l'une des fonctions de cet hélico durant la guerre du Vietnam.


Le conteneur était équipé de roulettes pour pouvoir être déplacé sur le sol et glissé sous l'appareil, et son intérieur était aménagé en cabinet médical. La seule différence avec l'hélico sur ces photos est que le mien sera civil, pouvant être transporté sur les lieux d'accidents dans des zones reculées par exemple. Plusieurs raisons à cela:
- les pièces en vert foncé sont peu fréquentes, pour ne pas dire très rares, en Technic.
- si ces pièces en vert foncé existent, je n'en ai pas, alors que j'ai des pièces rouges et blanches à foison.
- le rouge et le blanc sont bien souvent associés au domaine médical, et le mélange de ces deux couleurs est très sympa.
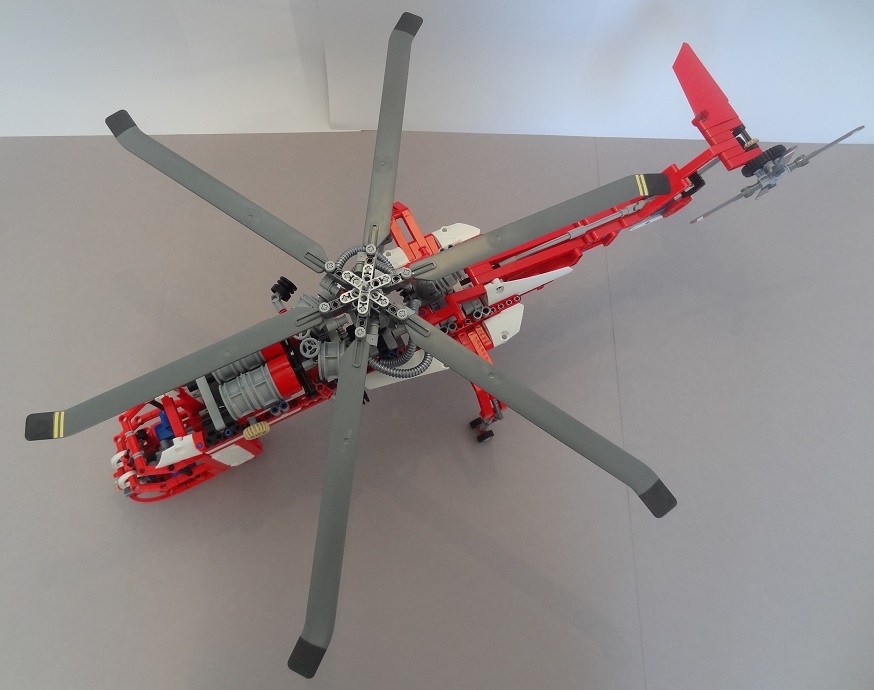
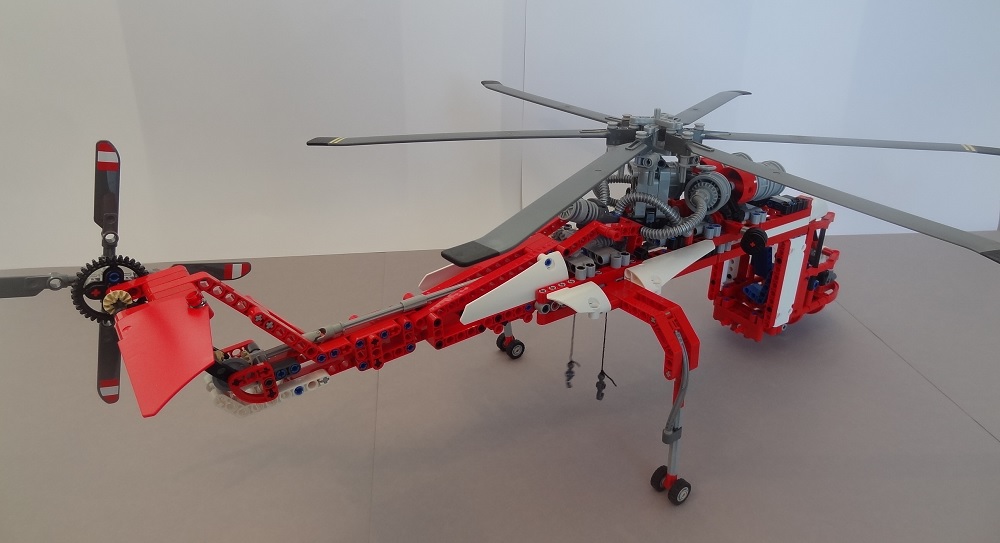
Je souhaitais aussi qu'on retrouve sur mon MOC les quelques spécificités d'aspect du vrai CH-54:
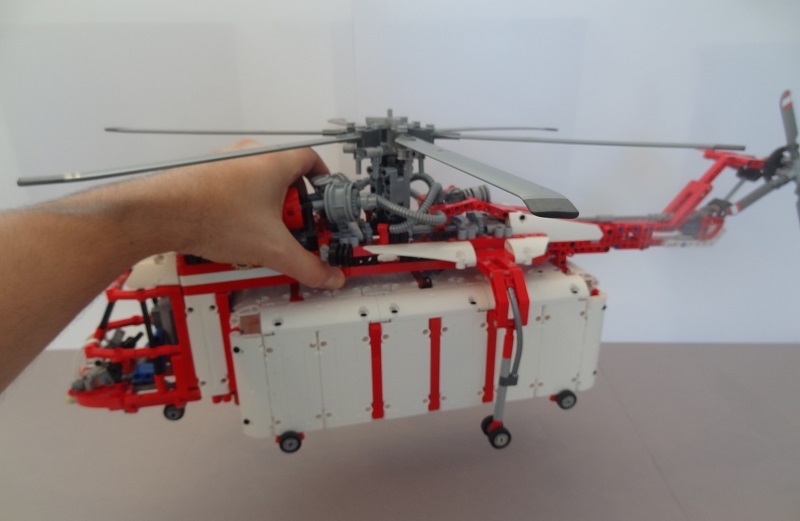
- 6 pales sur le rotor principal.
- 4 pales sur le rotor de queue.
- arbres de transmission du rotor de queue non carénés.
- arbres de transmission du rotor de queue disposés au-dessus de la queue pour la première partie, derrière l'empennage pour la seconde partie.
- présence d'un empennage horizontal au niveau de l'axe du rotor de queue.
- une cabine de forme arrondie, avec un "gros nez", dont l'intérieur sera suffisamment détaillé (tableau de bord, palonniers, manches à balai, les 2 sièges du pilote et du copilote, ainsi qu'un siège à l'arrière pour l'opérateur supervisant le chargement).
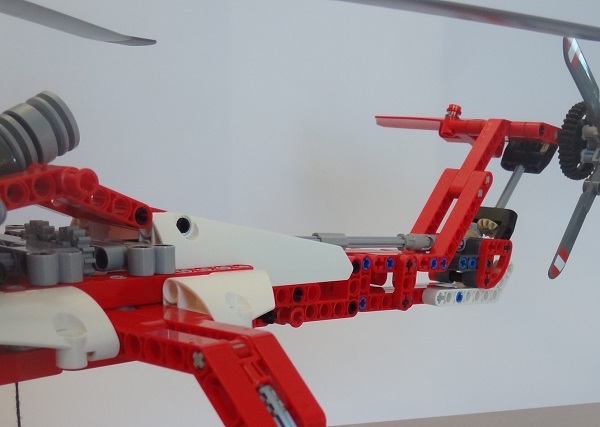
Sur cette photo, on voit bien les 5 premiers points cités à l'instant (la cabine est décrite plus loin):
Et enfin la présence d'un vrai conteneur hôpital de grande dimension (cf. les photos plus haut dans ce post) pouvant s'insérer sous l'appareil en roulant, puis être solidement arrimé au fuselage. Ou bien être suspendu via une ou plusieurs élingues.

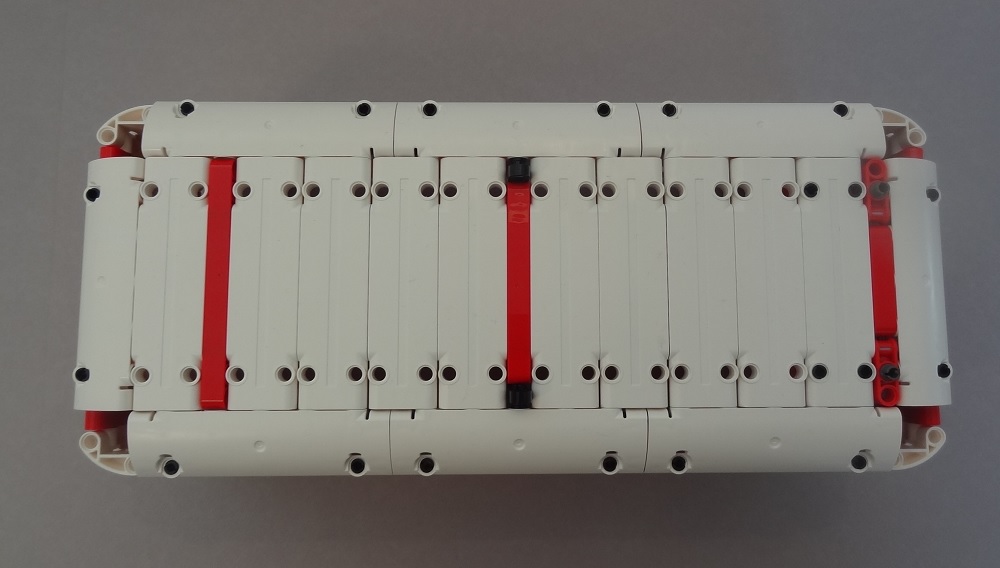
Il est relativement gros: 39 tenons de long, 17 de large et 15 de haut (en incluant la roulette). Il est à l'échelle de l'hélico (pour rappel il représente un petit hôpital). Il est constitué tout simplement de panels blancs entre lesquels j'ai inséré des beams rouges, pour accentuer le look hôpital. Il repose sur 4 petites roulettes, comme le modèle réel. Je n'ai pas poussé plus loin les détails (fenêtres, portes, etc.), le conteneur n'étant pas l'objectif du concours.
Nous verrons les détails de la fixation de ce conteneur plus loin.
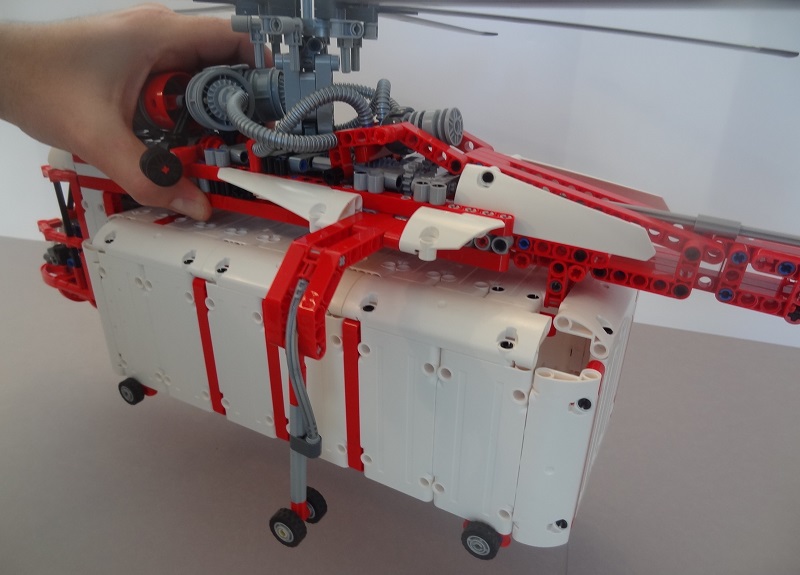
Comme vous pouvez le constater, le conteneur peut glisser sous l'appareil et venir se coller derrière la cabine. Le système d'accroche sera vu plus loin dans cette review.
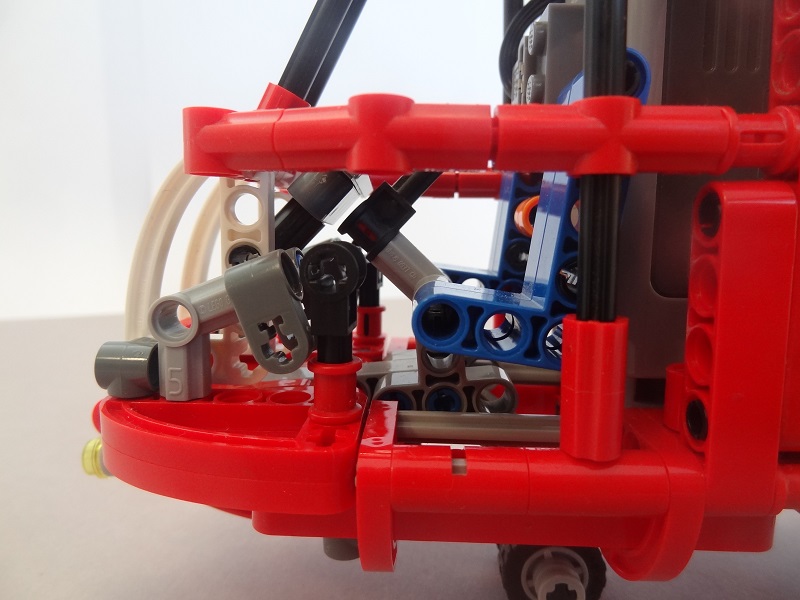
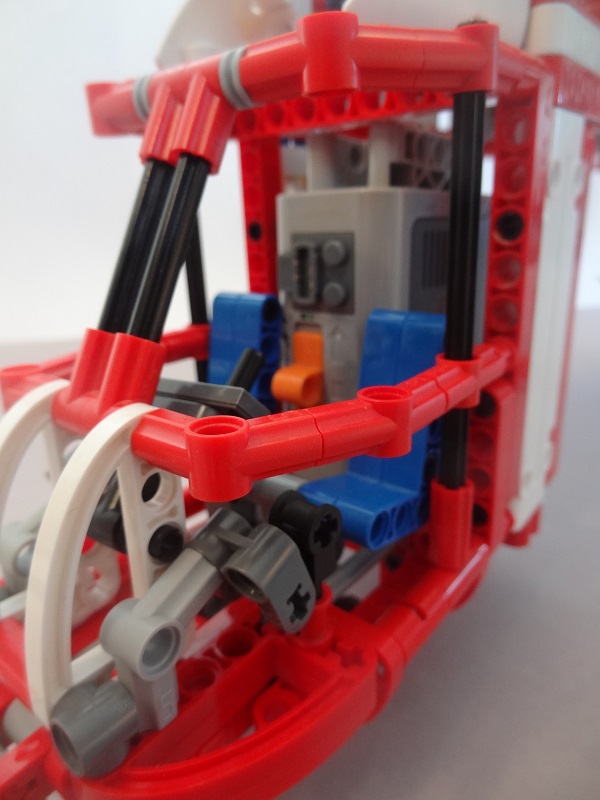
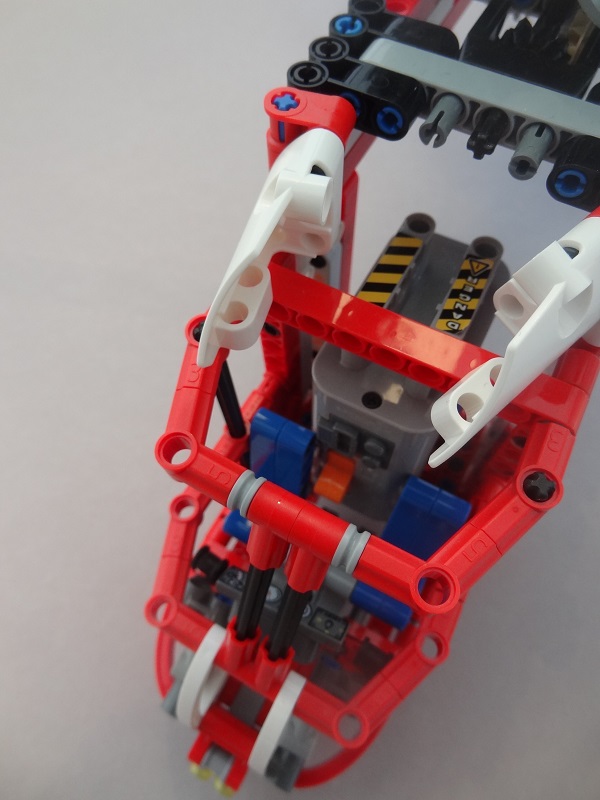
La cabine du CH-54 est plutôt ronde et d'aspect assez massif, contrairement au 9396 par exemple. Ça me semblait un point important à retranscrire. Plutôt que des panels incurvés, j'ai préféré utiliser des halfbeam curve. En version 3x5L, ils permettent de bien figurer l'aspect lourdaud du nez de la cabine. Pour finaliser la ligne de la carlingue, j'ai utilisé de classiques éléments d'angle. Je n'ai pas voulu mettre de panel incurvé, le rendu n'était vraiment pas agréable.
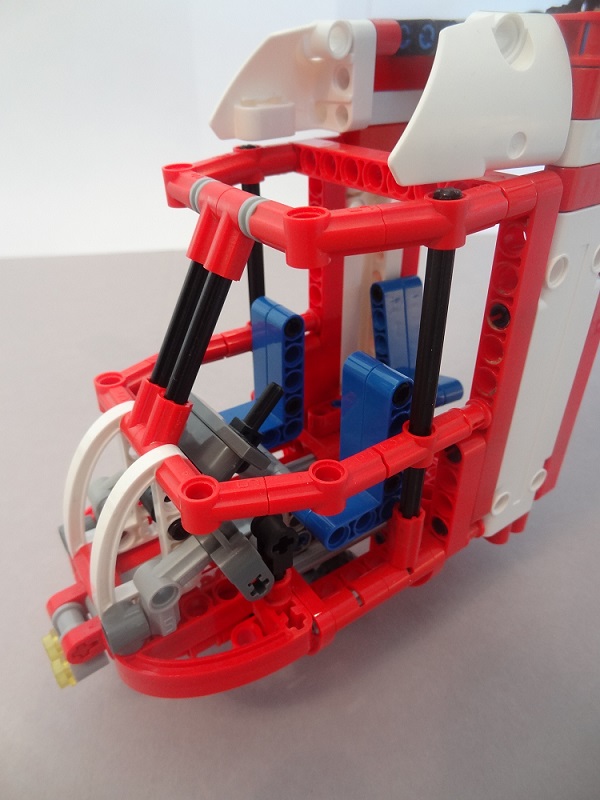
La cabine est plutôt bien aménagée. On y trouve 3 sièges: 2 frontaux pour le pilote et le copilote, et le troisième disposé en travers à l'arrière. Il s'agit du superviseur de la charge utile. Pour info/rappel, sur le modèle réel, la paroi arrière de la cabine est une vitre permettant de surveiller le comportement de la charge en vol.
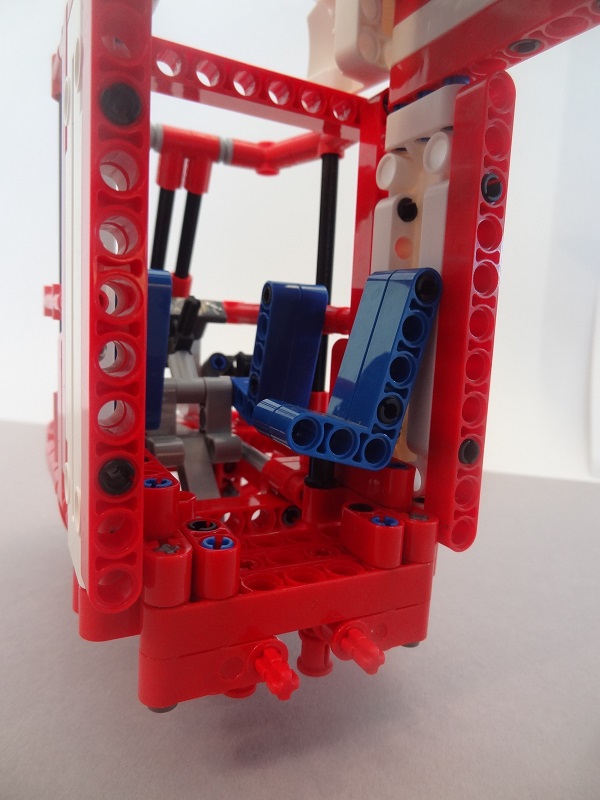
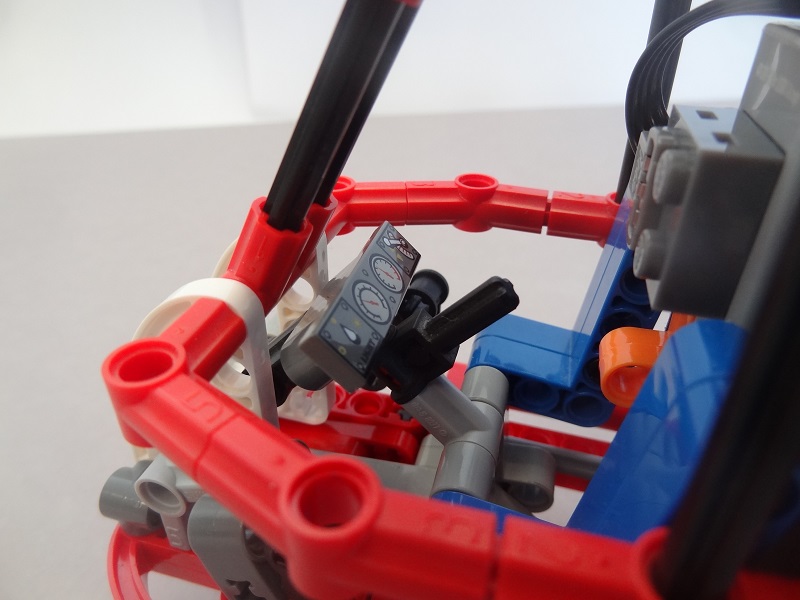
Le pilote et le copilote disposent chacun d'un manche à balai et d'un palonnier.
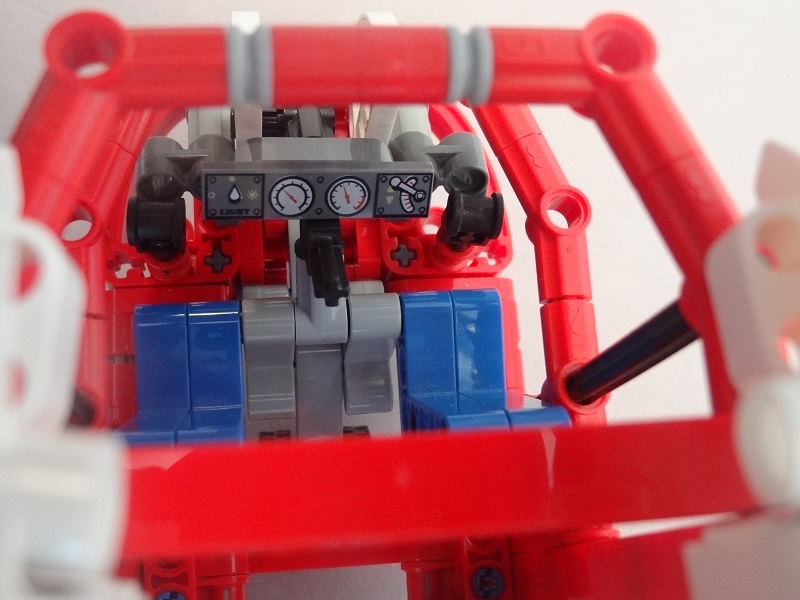
Le tableau de bord et un joystick central de commande finalisent l'équipement de cette cabine.
II - Choix techniques
1 - La boîte de vitesse
C'est précisé dans le sujet, et les premières entrées l'ont bien montré: la BV peut beaucoup varier d'un modèle à l'autre en fonction des choix de jouabilité faits, même si elle est assez simple à la base.
Voici mes choix:
- on doit bien évidemment pouvoir faire tourner les rotors sans actionner le treuil, et réciproquement.
- le treuil peut monter et descendre, donc 2 positions plus le neutre.
- les rotors tournent ou ne tournent pas, soit 1 position plus le neutre. La possibilité d'inverser le sens de rotation des rotors n'a pas plus de sens en Lego que dans la réalité.
- la BV doit tenir dans un châssis de 3 tenons d'épaisseur, au dépassement des pignons près.
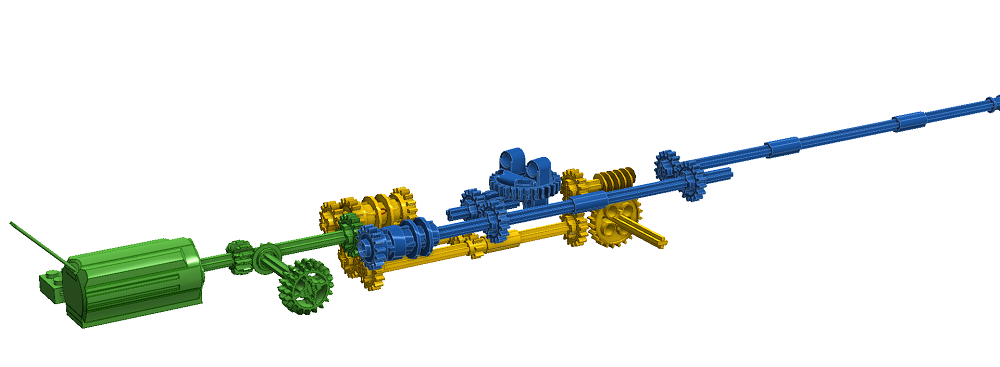
En vert, c'est l'origine du mouvement rotatif: à la main via le 20T, ou via le moteur PFS. En jaune c'est la commande du treuil, et en bleu celle des rotors.
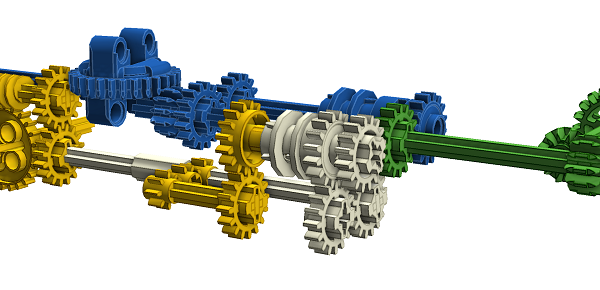
En position 1, le mouvement du treuil se fait via une succession de 16T:
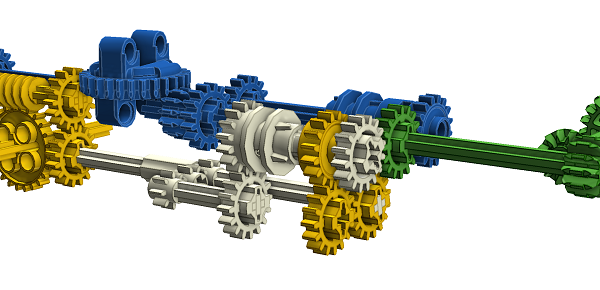
En position 2, le mouvement du treuil se fait via un enchaînement de 3 8T (1 de plus qu'en position 1 pour inverser la rotation):
Sur le MOC:
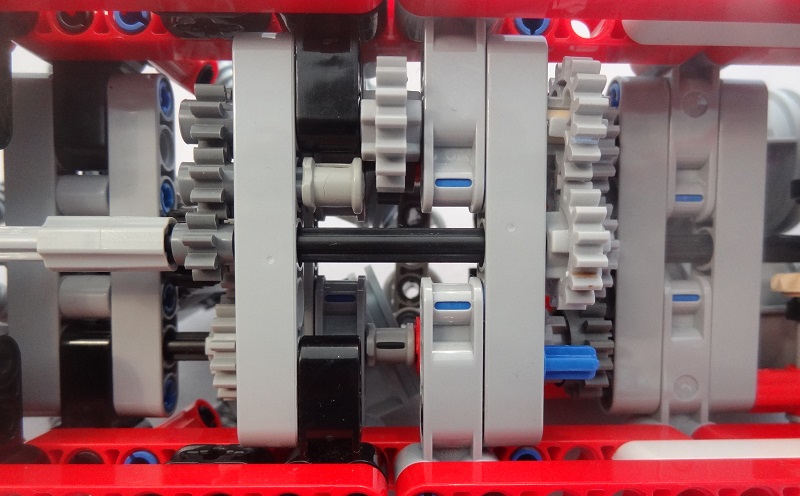
La fin du mouvement se fait classiquement via une VSF entraînant un 24T , dont l'axe supporte les 2 treuils de l'hélico.
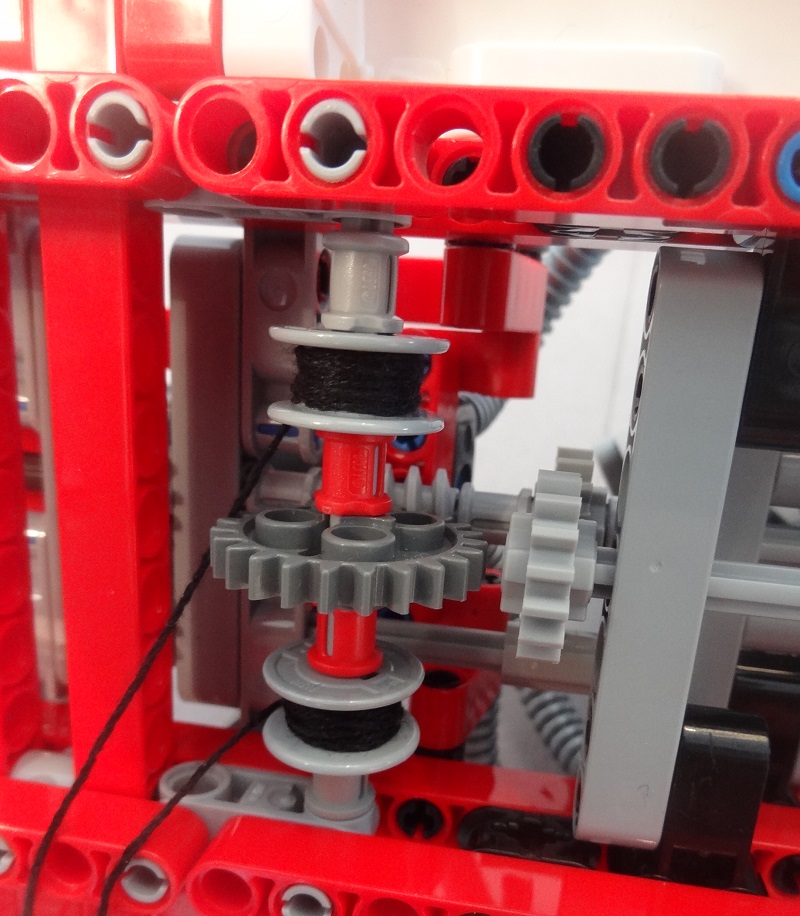
L'entraînement des rotors est encore plus simple: le driving ring, via un driving ring extension, vient s'enclencher sur la roue folle, elle-même entraînée par l'axe moteur (via un 16T). Comme dit plus haut, on ne peut pas inverser le sens de rotation des rotors, sauf bien sûr à inverser la rotation de l'axe moteur (ce qui est aussi impossible dans la réalité), mais ça n'a aucun intérêt.
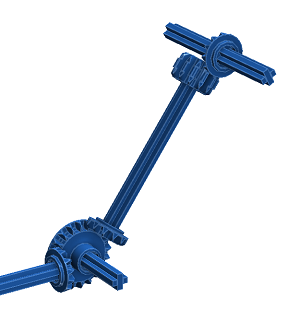
La suite du mouvement est très simple: via 2 16T, un 12T fait tourner la mini turntable supportant le rotor principal. L'axe issu de la BV poursuit vers l'arrière, puis est recentré pour passer au centre de la queue de l'appareil. L'avantage du 12T sur la turntable 28T, c'est qu'il y a une réduction de 2.3. Comme il n'y a pas de réduction pour aller vers le rotor de queue, 2.3 correspond aussi au ratio du rotor de queue par rapport au rotor principal. Le rotor de queue tourne donc bien plus vite que le principal.
L'angle entre l'axe d'arrivée du mouvement et l'axe remontant l'empennage ne permet pas l'utilisation d'un cardan, et un double cardan ne serait pas très efficace. Comme sur le 9396, j'ai utilisé le Pin Connector Toggle Joint en bas et dans le haut de l'empennage vertical.

Contrairement à la boîte de vitesse foireuse de ma navette pour le précédent concours, celle-ci fonctionne très bien, sans craquement.
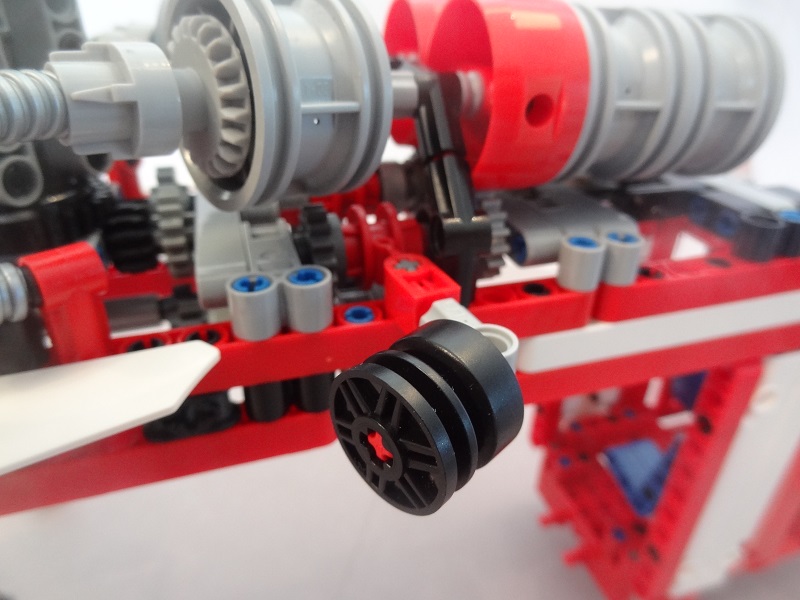
Les 2 chang-over catch déplaçant les driving rings s'actionnent simplement, chacun sur un côté de l'appareil, au même niveau. Dans un souci esthétique, j'ai camouflé les chang-over catch en tuyères. L'intérêt est double: on ne voit rien si on n'y fait pas attention, et la préhension est excellente.
2 - Le châssis
Le châssis de l'hélico doit être fin. Une épaisseur de 3 tenons s'impose plus ou moins comme la bonne taille: moins épais la solidité n'est plus là, plus épais ça commence à faire gros vu l'échelle du modèle. Elle est en tout cas suffisante pour assurer une bonne rigidité à l'ensemble. On peut sans problème tenir l'hélico par la queue sans que l'ensemble ne s'écroule, même si on peut noter une légère flexion.
3 - Les rotors
Évacuons tout de suite le sujet du rotor de queue, il s'agit de celui du 9396. Avec ses 4 pales, il correspond exactement à celui du CH-54.
Le rotor principal est basé sur les pales de 9396, ce n'est pas un scoop. Il en compte 6.
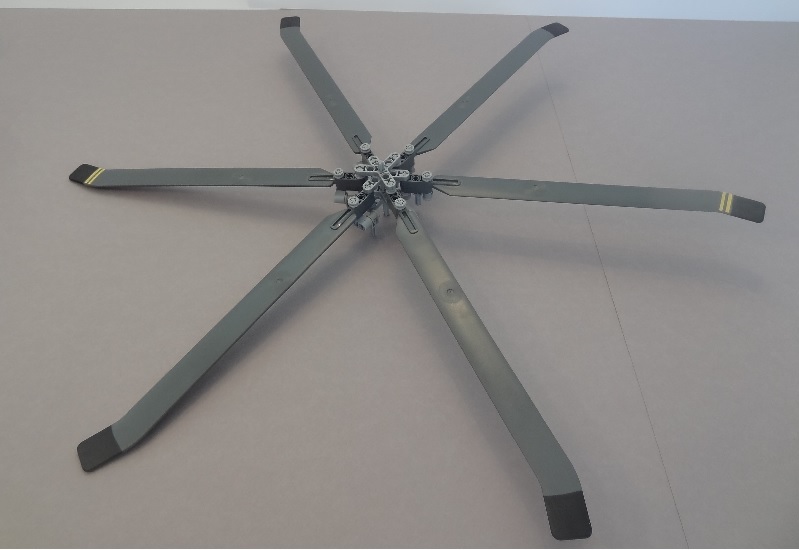
Ce rotor est basé sur la superposition de 2 Beam Rotor 3 Blade, décalés de 60°.
4 - Fixation du conteneur
Le conteneur peut s'accrocher de 2 façons à l'hélico: fixé fermement sous le châssis ou accroché aux câbles.
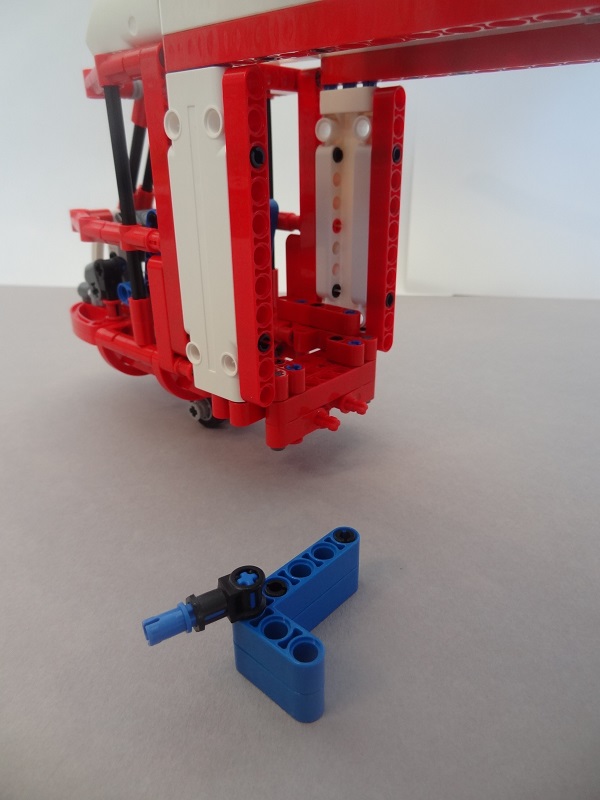
Dans le premier cas, alors que l'appareil est posé au sol, le conteneur vient rouler jusqu'à coller l'arrière de la cabine.

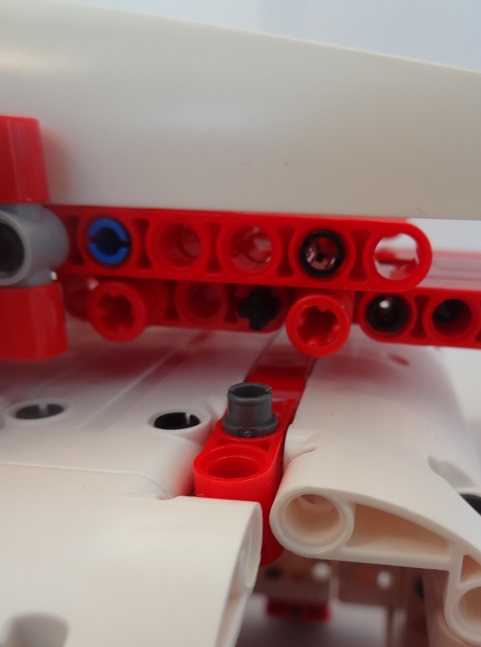
Là, 2 petits axes de 2L viennent s'insérer dans les trous des panels frontaux du conteneur.


Celui-ci est ainsi fixé dans le sens de la largeur et en profondeur. Il peut juste se retirer en reculant. Pour cela, un second mécanisme vient le bloquer dans cette autre dimension.
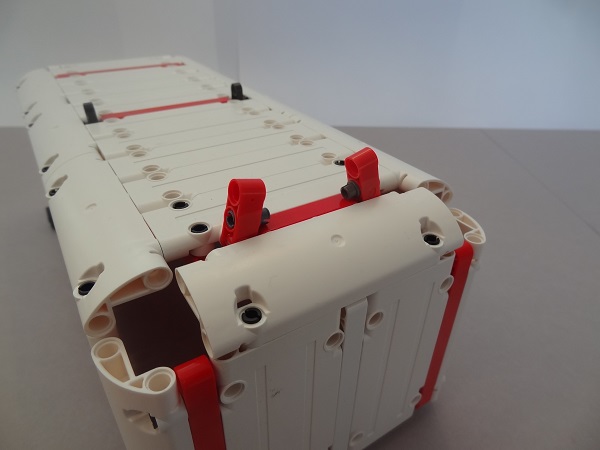
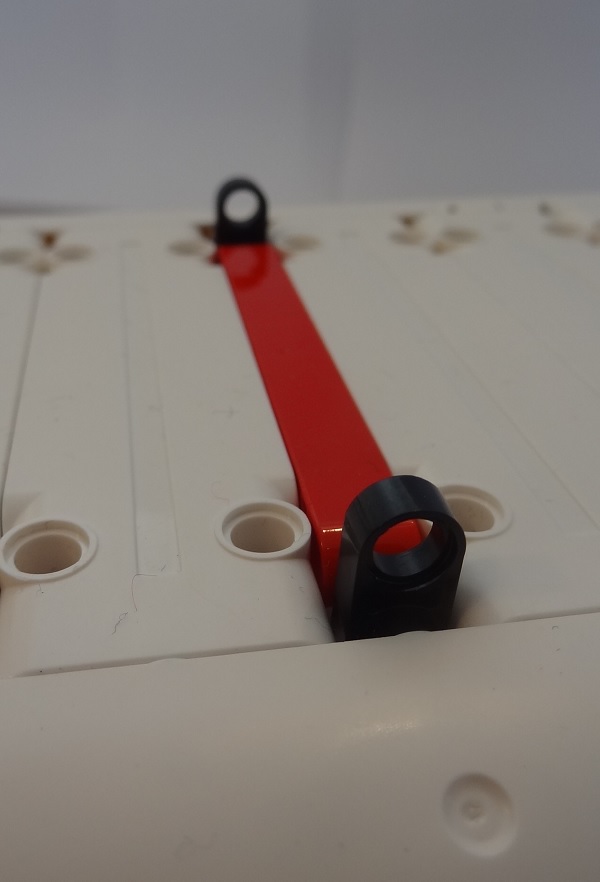
A l'arrière du toit du conteneur sont dissimulés 2 Axle and Pin Connector Perpendicular 3L with 2 Pin Holes.
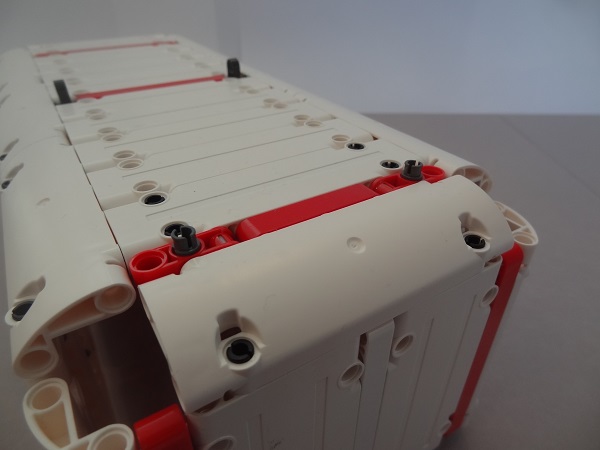
Il suffit de les pivoter à la main pour les redresser. Ils viennent alors s'insérer dans un axe situé en travers de la queue de l'appareil.

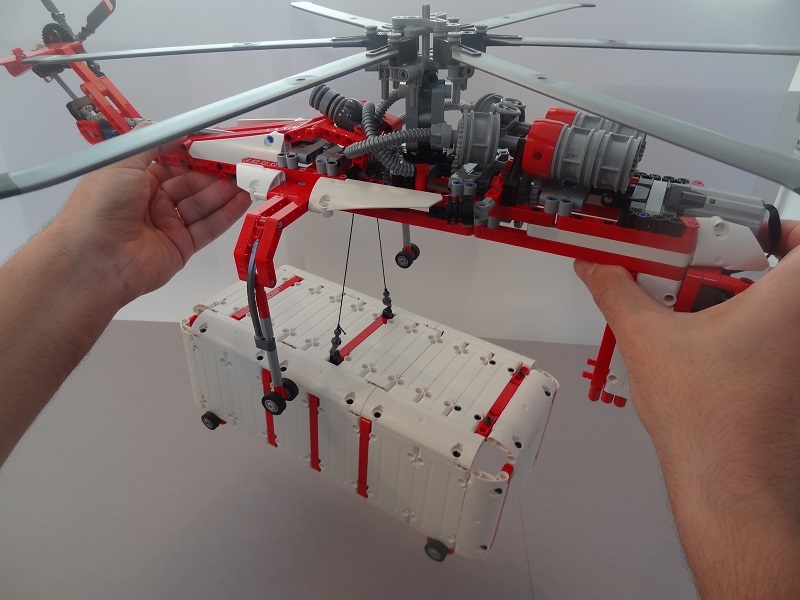
Dans la seconde configuration, le conteneur est suspendu à l'appareil. Le CH-54 réel utilise des élingues très variées en fonction de la charge à transporter. Exemple:

Il y a dans ce cas des élingues fixes un peu partout pour empêcher le pivotement de la charge, mais il n'y a plus alors de possibilité de treuiller quoique ce soit. J'ai donc choisi d'avoir 2 treuils et non un seul: un léger pivotement est donc possible, pas une rotation complète. Les 2 câbles sont chacun terminés par un crochet. Le conteneur est muni de chaque côté du toit de deux beams ne dépassant que d'un seul tenon. Les crochets viennent s'y insérer pour soulever la charge.
5 - Intégration du PFS
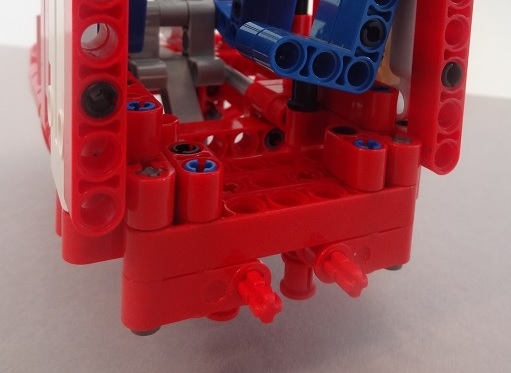
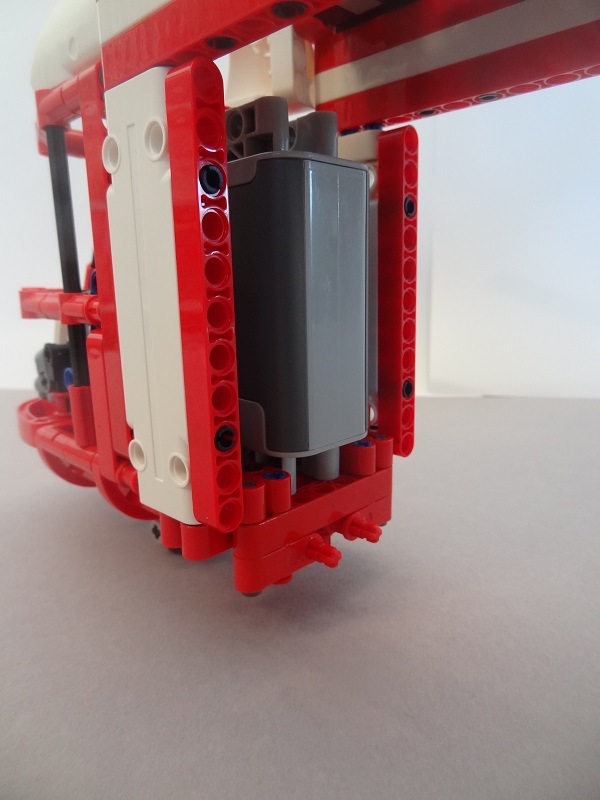
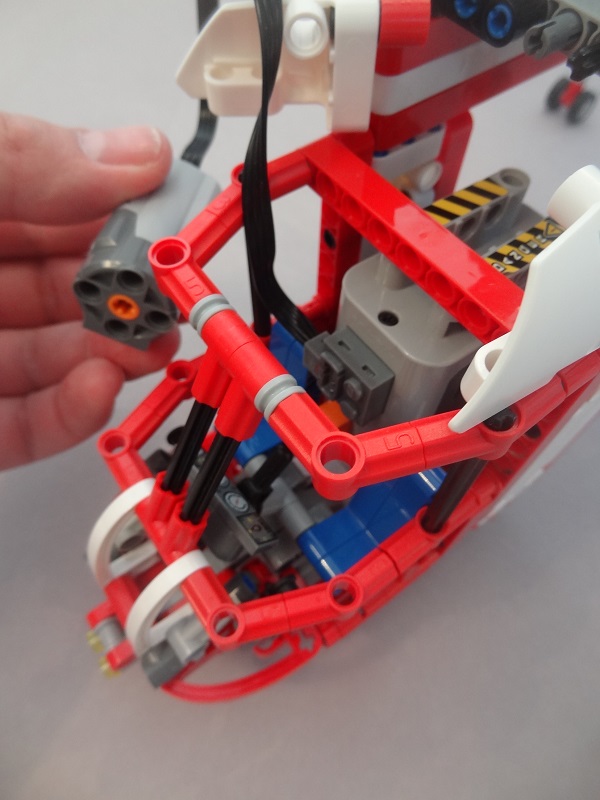
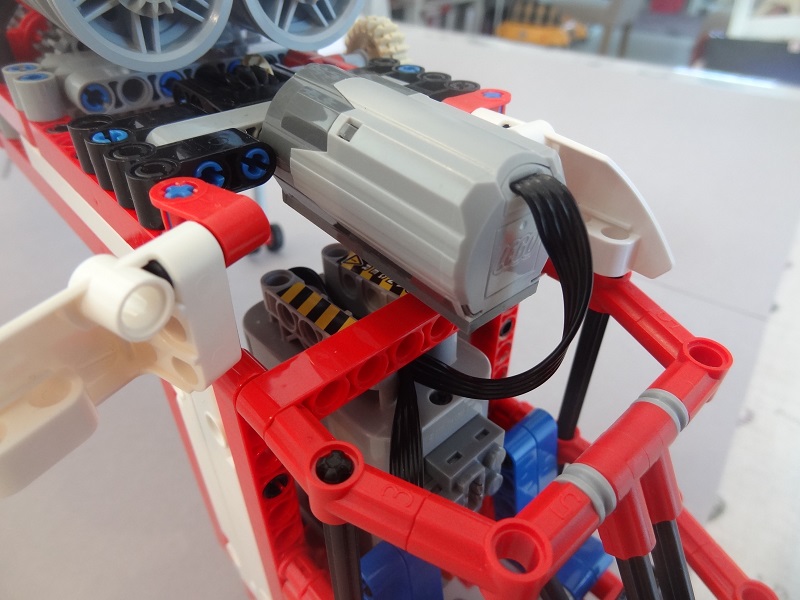
L'intégration du PFS est extrêmement simple: le moteur s'insère au-dessus de la cabine. L'axe moteur et 2 pins sont prévus à cet effet, le tout ne dépassant que d'un tenon.
J'ai souhaité que le boîtier PFS s'intègre complètement dans l'appareil et ne soit pas simplement accolé au fuselage. Le seul endroit disponible est la cabine. Il suffit donc de déclipser le troisième siège, libérant ainsi la place pour insérer le boîtier. Les différents beams sont placés pour faire un support efficace et stable au boîtier. La fixation du boîtier est assurée via 2 pins longs insérés sous la cabine.

Le MOC fait 878 pièces, conteneur et PFS compris:

Et pour finir la vidéo. Bon c'est pas du Spielberg (pas de musique ni d'effet et tout et tout), pas trop le temps, mais on voit bien les fonctions, ce qui est un peu l'essentiel
 Et puis tourner la molette d'une main en filmant de l'autre, ben c'est un peu tendu
Et puis tourner la molette d'une main en filmant de l'autre, ben c'est un peu tendu 
Merci d'avoir pris le temps de lire cette review, en espérant que ce MOC vous plaise



.gif ";)") j'aime beaucoup les formes, l'originalité de l'hôpital, les couleurs, l'intégration du Power Functions
j'aime beaucoup les formes, l'originalité de l'hôpital, les couleurs, l'intégration du Power Functions .gif ":)")






