



il est trop beau

lien vers les instructions
http://www.brickshelf.com/cgi-bin/gallery.cgi?f=202311
|
http://www.brickshelf.com/cgi-bin/gallery.cgi?m=BUZ
Aménagement de Garage en cours |
|
bin sa alors je pensais que legossimo pesait 2ou 3 kilos mais 10!!
 l'abus de légo est bon pour la santé
 |
|
 Alors la il est génial joli réalisation encore bravo. Alors la il est génial joli réalisation encore bravo.  |
|
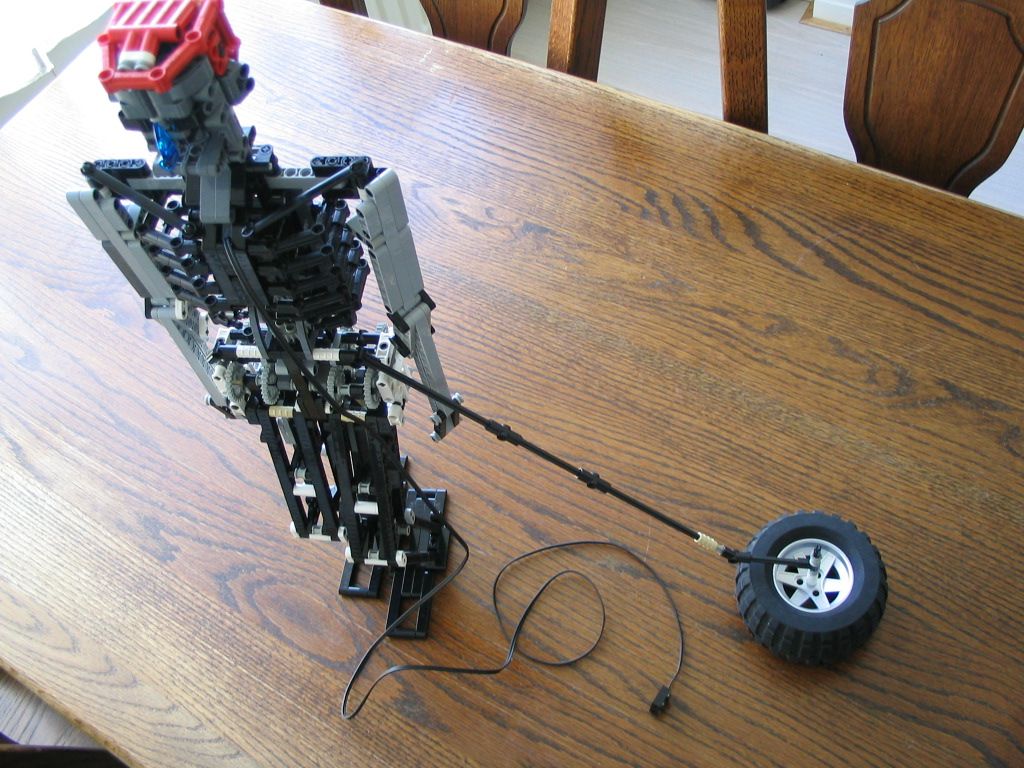
Oui d'accord avec Bull29 autant utilisé ce que l'on à déjà. j'ai fais un essais avec le déhanchement mais au niveau du bassin. Je vous fais une photo de l'idée de départ pour vous montrer. Mon plus gros problème c'est la vitesse d'action : un déhanchement doit être rapide et précis pour pouvoir être efficace et surtout sous la gestion d'un capteur. Segway est efficace car très réactif.
A + "Ce qui se conçoit bien s’énonce clairement et les mots pour le dire viennent aisément..." Nicolas Boileau-Despreaux
Mon blog = http://semtou.skyrock.com/ Ma galerie photos = http://www.brickshelf.com/cgi-bin/gallery.cgi?m=SEMTOU |
Retourner vers Vos MOCs Technic
Utilisateurs parcourant actuellement ce forum : Aucun utilisateur inscrit et 46 invités












