



.gif ";)")
Sujet du jour:

Donc voilà, je me suis décidé a commander quelque pièces neuves chez TLG: les nouveaux engrenages de BV de la Chiron.
Mon objectif était de voir, tester et développer le potentiel de ces nouvelles pièces. En fait, dès que je les ai vues je me suis dit qu'elles étaient faites pour entrer dans une moto.
Je me suis donc mis au travail. A départ du projet je m'était orienté vers une sorte de moto GP, puis le projet a évolué. Pour info je suis passé par ce stade:
En cours de développement je me suis heurté à pas mal de difficultés liées pour l'essentiel à une méconnaissance des nouvelles pièces et un manque d'expérience dans le domaine des BV. J'ai donc tâtonné pas mal et réalisé de multiples versions successives, en gardant plusieurs modèles montés à la fois et en travaillant sur chaque aspect que j'ai pu identifier.
Voici un exemple illustré:

Dans ce projet les éléments bloquants que j'ai pu identifier sur le modèle Lego sont les suivants:
- intégration d'un séquenceur compact (credit @ lego Technic Mastery)
- intégration de la chaine et liaison BV-roue
- Limitation en largeur de la BV
- Intégration de la commande du séquenceur vers le nouveau selecteur rotatif orange
- Maintien d'un volume réaliste et cohérent du bloc moteur/BV/sequenceur par rapport au modèle.
En développement, j'ai séparé les aspects suivants, en les mettant au point un par un, chaque fois sur base d'un nouveau modèle construit à côté du précédant:
- Fourche arrière,
- Partie cycle, le cadre
- Le bloc moteur, évidemment
- Le séquenceur et plus particulièrement son intégration
- La partie design et habillage
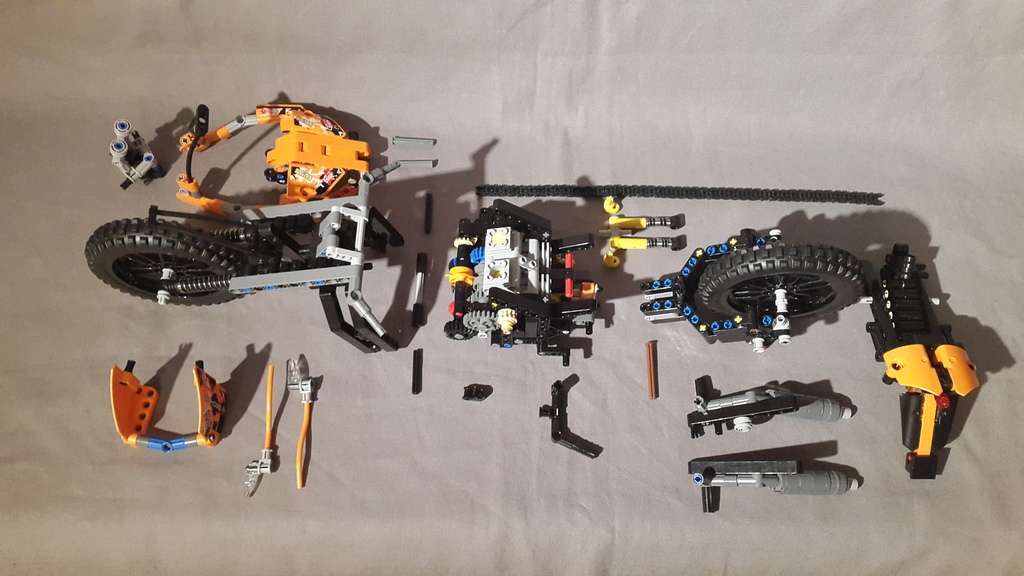
Voyons à présent les différents éléments constitutifs de cette moto. Je me suis abreuvé de vidéos, recherches, documentation sur les sites des différents fabricants etc...
vue générale des composants: la conception ne peut pas être qualifiée de modulaire à proprement parler, mais il y a quand même une notion de point d'attention, de sous-ensemble et fatalement de la cohérence entre eux
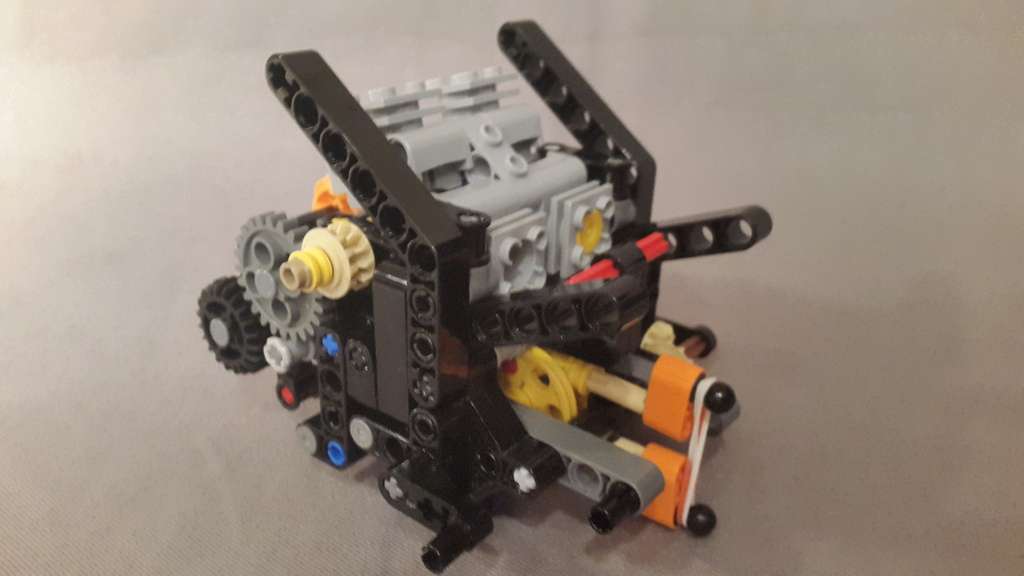
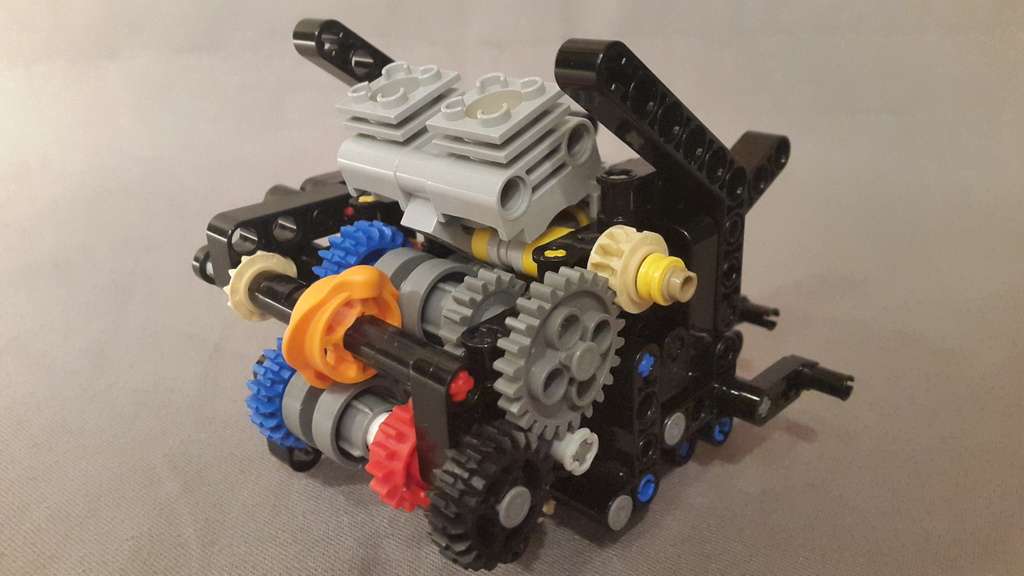
En détail: le bloc moteur/BV/séquenceur:
Le séquenceur est réalisé au départ d'un système fonctionnant par poussée uniquement, d'où sa fiabilité incroyable. Il est simple comme choux, et il faut rendre à César ce qui lui appartient, voici la vidéo d'inspiration:
Je vous recommande vivement cette chaine YT, tant il y a de bonnes idées.
Revenons à notre moto. Si ce système est brillant en soi, il ne pouvait pas être intégré en l'état puisqu'il ne supporte guère de lourde charge en fonctionnement. Je l'ai donc modifié au niveau de la tension entre les bras poussant pour qu'il puisse admettre les charges induites par le mécanisme jusqu'à la commande rotative orange. J'ai aussi supprimé le problème évident de sa fragilité. Le mien es robuste, fiable et endurant:

Vu sous un autre angle ce bloc moteur illustre assez bien la gymnastique intellectuelle qu'il a fallu faire pour assembler le tout:

Iln'y a pas de secret pour s'en sortir dans un tel exercice si ce n'est peut être là aussi de séquencer chaque fonction, définir chaque liaison, en deduire les besoins en espaces et puis....ben essayer et essayer encore
Vu du bas, on comprend que la BV ne fonctionne pas du tout comme traditionnellement. Seul 3 axes en rotation si j'excepte la liaison à la roue et donc des combinaisons entre roues folles qui sont elle-même déjà callées a des vitesses de rotation différentes. Sans faire de savant calcul, j'ai empiriquement compté les tours moteurs et sur base d'une rotation de la roue arrière on obtient les ratios suivants:
- 1ere vitesse - 1 Tour de roue donne 6 tours moteurs
- 2ème vitesse - 1 Tour de roue donne 5 tours moteurs
- 3ème vitesse - 1 Tour de roue donne 4 tours moteurs
- 4ème vitesse - 1 Tour de roue donne 3 tours moteurs
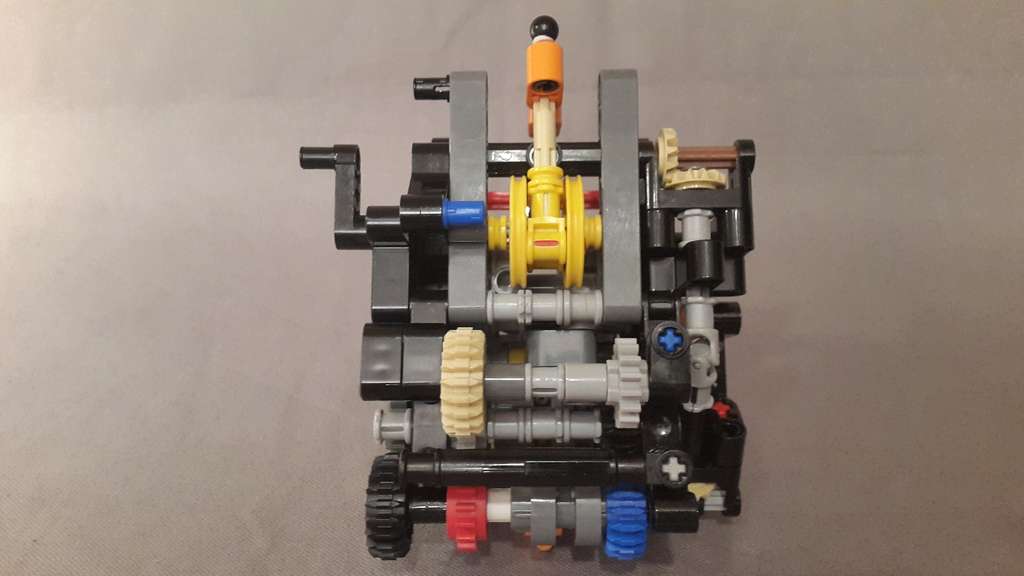
Je ne vous raconte pas la galère pour d'une part obtenir ces ratios, mettre les vitesses dans le bon ordre et en plus faire en sorte que la commande au pied les passe d'une manière logique, soit la première en bas et les autres au dessus...Bref, on fini avec une dernière vue de ce sous-ensemble:
La fourche arrière. Initialement en monobras, je suis vite retourné à un schéma plus simple a mettre en œuvre, plus fiable et qui entraine moins de torsion sur le cadre:
Image de l'intégration de la fourche au bloc moteur, notez également l'intégration des points de fixation de la suspension et son renfort dans deux plans:

et l'assemblage:

Passons au cadre. Si l'idée générale de base est finalement d'intégrer une BV à une moto, je me suis rapidement fixé des objectifs plus ambitieux. J'ai donc essayé de faire en sorte que l'ensemble ressemble au plus près a une vraie moto. Parmi les points d'attention il fallait que le bloc moteur ne soit pas trop volumineux, qu'il soit suspendu au cadre et reste globalement contenu sous le niveau de ce dernier. En vrai, au dessus il y a normalement la boite a air et le réservoir.
Vue de l'assemblage cadre/moteur:
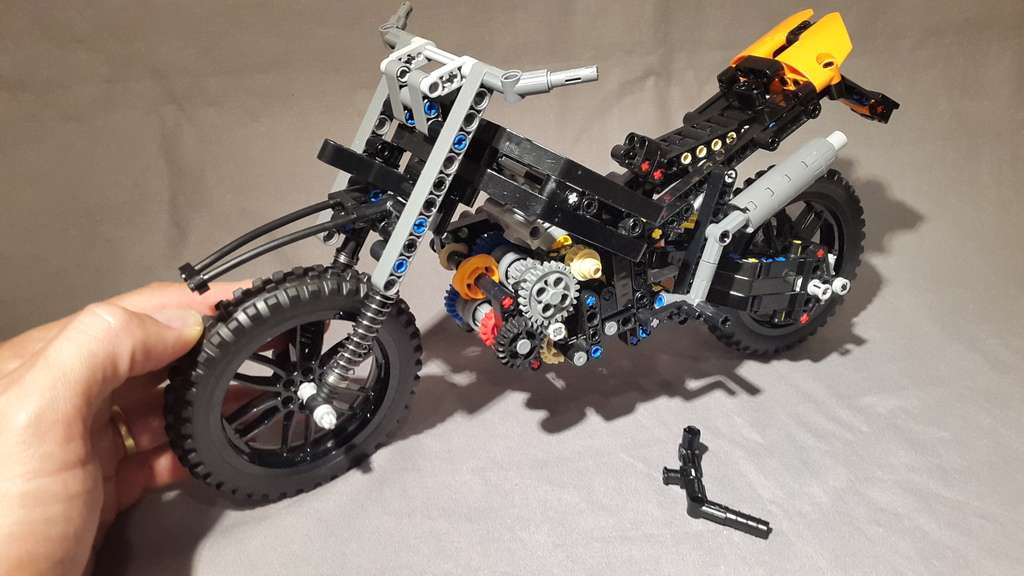
J'ai régulièrement comparé mon modèle a des photos de cadres réel pour arriver à ce résultat.
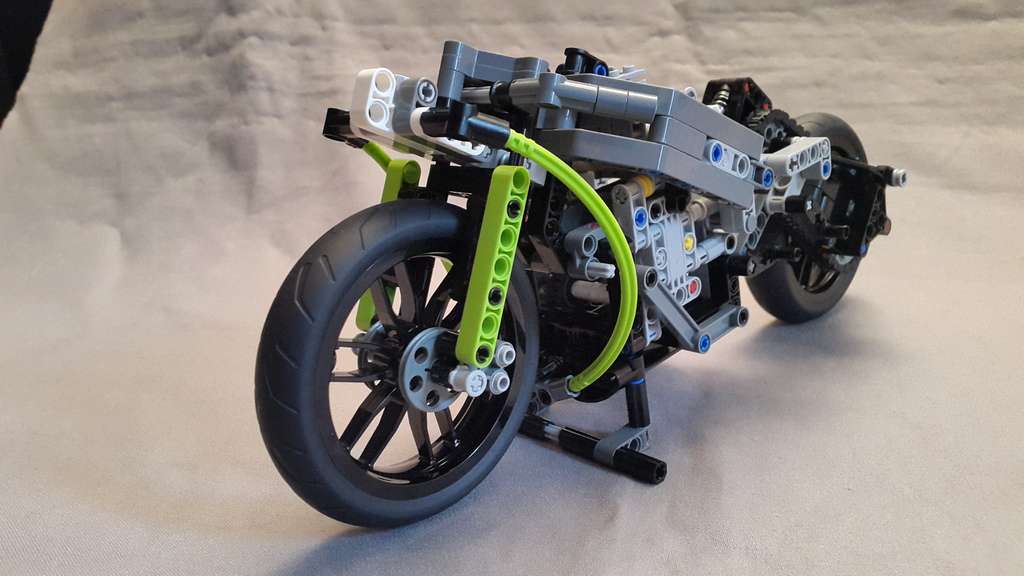
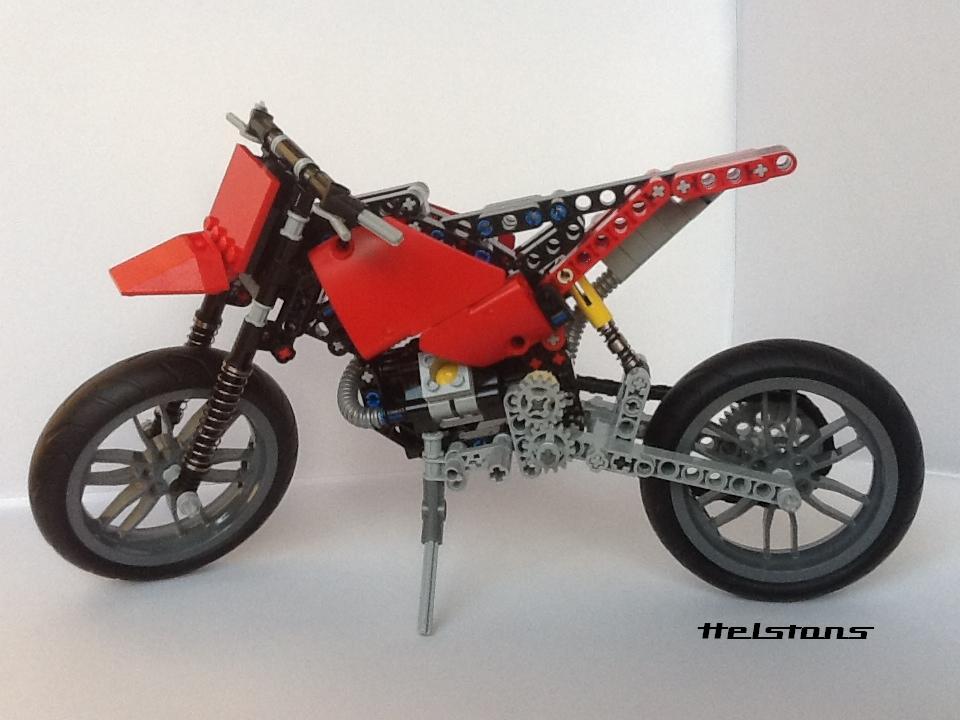
Finalement, on ajoute les détails de carrosserie:


Et on obtient au final ce modèle:

Avec une petite vidéo pour la montre r sous tous les angles:
En guise de conclusion. Il faut retenir que les nouvelles pièces de TLG offrent un potentiel incroyable. Elles permettent des transmissions d'une fluidité inégalée tant dans le passage des rapports que dans l'entrainement de la boite elle même. Si je devais chiffrer la réduction de friction on est je pense de l'ordre de 5à6 fois moins de friction. Cette moto roule sur du velours, même en première vitesse, on ne sent aucune résistance.
Sur le projet en lui même, je suis assez satisfait du résultat final. Bon look, belles fonctionnalités sans en avoir fait une usine à gaz et super expérience de développement.
J'espère qu'elle vous plaira.
A+
Steph








.gif ":)")


 J'ai une idée sur le fonctionnement, mais suis pas sur que ça fonctionnerait, donc je veux bien une petite explication aussi!
J'ai une idée sur le fonctionnement, mais suis pas sur que ça fonctionnerait, donc je veux bien une petite explication aussi!






 ,
,
