

Bonjour à tous 
je vous présente ici mon premier MOC, un petit camion utilitaire à propulsion solaire.
J’ai passé beaucoup de temps et d’énergie dans ce MOC aussi avais-je à cœur d’en faire une présentation soignée.
 photo_1 by TechToth, sur Flickr
photo_1 by TechToth, sur Flickr
Voici les différents points évoqués ci-après :
I) historique et cahier des charges du projet
II) le train avant et la direction
III) le design, l’aspect global
IV) le train arrière
V) BV + moteur
VI) fonctions 1 & 2 : les portes de cabine
VII) fonction 3 : les panneaux solaire
VIII) fonction 4 : la porte latérale
IX) Conclusion
X) vidéo
I) historique et cahier des charges du projet
En sortant de mon dark age en 2014 j’ai pris une sacré claque sur les possibilités au combien plus riches des Technic par rapport à mes modèles des 80’s-90’s. Très vite j’ai voulu comprendre le pourquoi de la forme et l’utilité de telle ou telle pièce. Plutôt que de lire plein d’articles et de reproduire les modèles des autres (attitude tout à fait louable au demeurant) j’ai préféré apprendre en manipulant. Je me suis alors lancé le défi d’un MOC en partant de zéro (c’est en forgeant qu’on devient forgeron !). J’ai donc choisi de faire un petit véhicule utilitaire avec comme cahier des charges :
 .
.
Après 3 ans de réflexion, de retouches, de pauses (ben oui y’a pas que les Lego dans la vie, y’a aussi les enfants, la construction de maison, le boulot,... toussa toussa), de « yes !! » comme de « Grrr, ca marche pas !!
» comme de « Grrr, ca marche pas !!  » , ... j’ai enfin fini !
» , ... j’ai enfin fini !
II) le train avant et la direction
j’ai souhaité dès le début avoir un camion ayant un bon angle de braquage , pensant naïvement que cela allait me donner un bon rayon de braquage alors qu’en réalité fa distance entre le train avant et le train arrière l'impacte elle aussi, d’où (je pense) ce 55cm en rayon de braquage extérieur un peu décevant.
Quoi qu’il en soit pour avoir et une suspension indépendante et un bon angle de braquage il me fallait des bras de direction montés sur rotules et relativement peu épais (sinon ils bloquent sur les bras de suspension après un faible angle de braquage). Je n’ai malheureusement pas trouvé plus récent que les bras de direction de ma vieille supercar 8865 de 88 !
de ma vieille supercar 8865 de 88 ! 
De plus ils ont du être rallongés avec des liftarm 2X1 pour avoir un semblant d’effet Ackermann. Sans cela l’angle de braquage était meilleur mais les roues sortaient de leur axe en moins d’un demi-tour, c’était gênant !!
je vous présente ici mon premier MOC, un petit camion utilitaire à propulsion solaire.
J’ai passé beaucoup de temps et d’énergie dans ce MOC aussi avais-je à cœur d’en faire une présentation soignée.
photo_1 by TechToth, sur FlickrVoici les différents points évoqués ci-après :
I) historique et cahier des charges du projet
II) le train avant et la direction
III) le design, l’aspect global
IV) le train arrière
V) BV + moteur
VI) fonctions 1 & 2 : les portes de cabine
VII) fonction 3 : les panneaux solaire
VIII) fonction 4 : la porte latérale
IX) Conclusion
X) vidéo
I) historique et cahier des charges du projet
En sortant de mon dark age en 2014 j’ai pris une sacré claque sur les possibilités au combien plus riches des Technic par rapport à mes modèles des 80’s-90’s. Très vite j’ai voulu comprendre le pourquoi de la forme et l’utilité de telle ou telle pièce. Plutôt que de lire plein d’articles et de reproduire les modèles des autres (attitude tout à fait louable au demeurant) j’ai préféré apprendre en manipulant. Je me suis alors lancé le défi d’un MOC en partant de zéro (c’est en forgeant qu’on devient forgeron !). J’ai donc choisi de faire un petit véhicule utilitaire avec comme cahier des charges :
- - une échelle basée sur les seules roues de « camion » dont je disposais à l’époque, celle du 8258, et avec une faible largeur,
- 4 suspensions indépendantes,
- rayon de braquage faible
- 4 fonctions « originales » motorisés via une BV,
- le maximum de volume utile dans la zone de chargement (et ca c’est compliqué)
- une « propulsion solaire » pour le fun et puis j’aime pas les moteurs factices tout fait
- le souci du détail.
.Après 3 ans de réflexion, de retouches, de pauses (ben oui y’a pas que les Lego dans la vie, y’a aussi les enfants, la construction de maison, le boulot,... toussa toussa), de « yes !!
» comme de « Grrr, ca marche pas !! » , ... j’ai enfin fini !II) le train avant et la direction
j’ai souhaité dès le début avoir un camion ayant un bon angle de braquage , pensant naïvement que cela allait me donner un bon rayon de braquage alors qu’en réalité fa distance entre le train avant et le train arrière l'impacte elle aussi, d’où (je pense) ce 55cm en rayon de braquage extérieur un peu décevant.
Quoi qu’il en soit pour avoir et une suspension indépendante et un bon angle de braquage il me fallait des bras de direction montés sur rotules et relativement peu épais (sinon ils bloquent sur les bras de suspension après un faible angle de braquage). Je n’ai malheureusement pas trouvé plus récent que les bras de direction
de ma vieille supercar 8865 de 88 ! De plus ils ont du être rallongés avec des liftarm 2X1 pour avoir un semblant d’effet Ackermann. Sans cela l’angle de braquage était meilleur mais les roues sortaient de leur axe en moins d’un demi-tour, c’était gênant !!
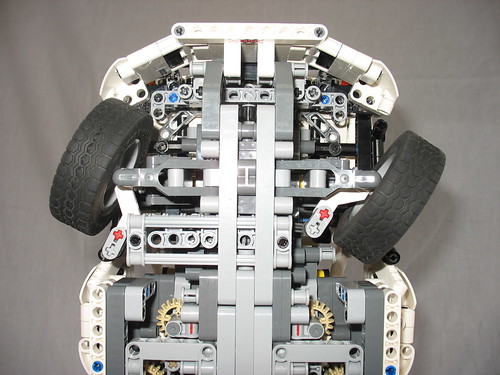
Coté mécanique la crémaillère devait forcément être reliée aux bras de direction par des link 1X6 à rotules mais la faible largeur du véhicule implique que cette liaison ne pouvait pas se faire dans l’axe de la crémaillère comme c’est habituellement le cas. D’où le mécanisme de crémaillère un peu bizarre que l’on voit ci-dessous.
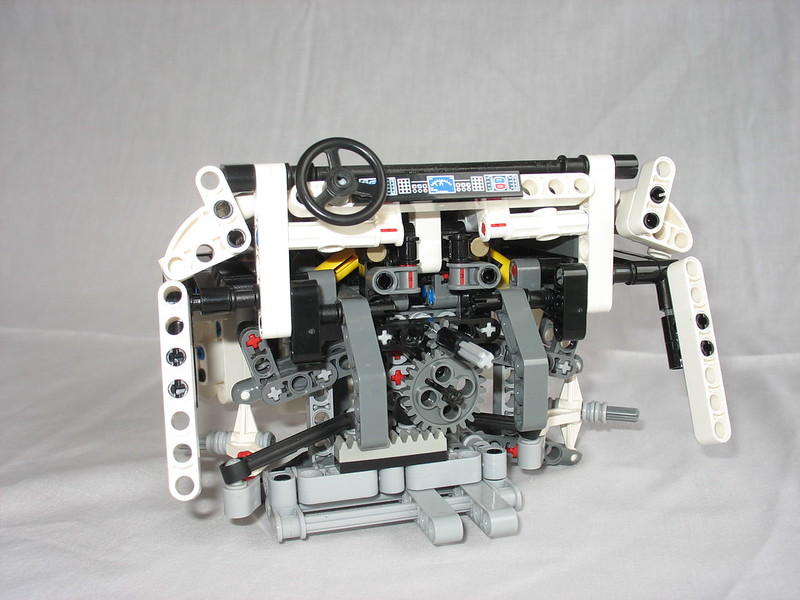
Enfin la direction est contrôlée par une HOG 20T qui passe entre les 2 sièges, renvoi d’angle avec knobs puis une 8T vient s’engrener sur la 24T qui actionne sur la crémaillère.(amplitude complète en 1,5 tour de HOG).
La 8T précédente se prolonge à travers la structure de l’avant pour aboutir sur une 12T puis une 24 T qui se prolonge en 8T puis une autre 8T et enfin un double cardan qui renvoie au volant (développement complet en 2 tours de volant).
III) le design, l’aspect global
A mon sens le design est l’une des parties les plus difficiles en Technic, c’est en partie pour cela que j’ai choisi un camion « futuriste » : des formes simple et pas de nécessité de coller aux véhicules réels actuels.
Les formes sont relativement simples et plates mais en adoucissant les angles avec des panels courbes et des pièces studfull. La couleur blanche me paraissait évidente pour ce type de véhicule et la pointe de noir qui lui donne du caractère (et d’ailleurs certaines pièces n’existent pas en blanc). L’intérieur est en jaune/noir.
La 8T précédente se prolonge à travers la structure de l’avant pour aboutir sur une 12T puis une 24 T qui se prolonge en 8T puis une autre 8T et enfin un double cardan qui renvoie au volant (développement complet en 2 tours de volant).
III) le design, l’aspect global
A mon sens le design est l’une des parties les plus difficiles en Technic, c’est en partie pour cela que j’ai choisi un camion « futuriste » : des formes simple et pas de nécessité de coller aux véhicules réels actuels.
Les formes sont relativement simples et plates mais en adoucissant les angles avec des panels courbes et des pièces studfull. La couleur blanche me paraissait évidente pour ce type de véhicule et la pointe de noir qui lui donne du caractère (et d’ailleurs certaines pièces n’existent pas en blanc). L’intérieur est en jaune/noir.



L’avant est un peu trop long mais pas le choix pour intégrer et le retour au volant et la suspension et la direction. Cet avant est par ailleurs un peu mastoc et les liftarm de 3 au dessus des phares, s’ils bouchent un trou peu esthétique, apporte une certaine sévérité au « regard » du camion. Tant pis. 
La partie arrière de la cabine, entre les sièges et la zone de chargement est un peu trop long également mais là encore je n’ai pas réussi à en diminuer l’épaisseur car il fallait y caser moteur, Bbox et BV.
En revanche j’ai eu de la chance pour les passages de roues arrières : ils s’intègrent très bien dans la cloison grâce à deux slopes 4X1.
Les portes arrières s’ouvrent à un peu plus que 90° en mode normal puis en tournant 2 petites butées sur l’intérieur de chaque porte on peut libérer les gonds et alors ouvrir la porte au maximum, à plus de 270° donc, en la plaquant contre la paroi latérale.
La partie arrière de la cabine, entre les sièges et la zone de chargement est un peu trop long également mais là encore je n’ai pas réussi à en diminuer l’épaisseur car il fallait y caser moteur, Bbox et BV.
En revanche j’ai eu de la chance pour les passages de roues arrières : ils s’intègrent très bien dans la cloison grâce à deux slopes 4X1.
Les portes arrières s’ouvrent à un peu plus que 90° en mode normal puis en tournant 2 petites butées sur l’intérieur de chaque porte on peut libérer les gonds et alors ouvrir la porte au maximum, à plus de 270° donc, en la plaquant contre la paroi latérale.
IV) le train arrière
Les roues arrières sont fixées de manière atypique : deux axes de 10 verticaux fixés au châssis servent de guide sur lesquels vient coulisser un cadre Technic (ce n’est pas la seule fois où vous verrez ce type de connexion dans ce MOC, loin s’en faut !.gif ";)") ). Sur la partie basse du cadre vient se fixer la roue et sur la partie haute 1 amortisseur jaune et un gris (2 amortisseurs pour bien supporter le poids du véhicule). Chaque roue arrière garde ainsi bien sa verticalité pour une fixation d’épaisseur 2 tenons ! On a ainsi un mécanisme rigide qui s’insère dans la cloison du camion et laisse libre la zone de chargement.
). Sur la partie basse du cadre vient se fixer la roue et sur la partie haute 1 amortisseur jaune et un gris (2 amortisseurs pour bien supporter le poids du véhicule). Chaque roue arrière garde ainsi bien sa verticalité pour une fixation d’épaisseur 2 tenons ! On a ainsi un mécanisme rigide qui s’insère dans la cloison du camion et laisse libre la zone de chargement.
Les roues arrières sont fixées de manière atypique : deux axes de 10 verticaux fixés au châssis servent de guide sur lesquels vient coulisser un cadre Technic (ce n’est pas la seule fois où vous verrez ce type de connexion dans ce MOC, loin s’en faut !
). Sur la partie basse du cadre vient se fixer la roue et sur la partie haute 1 amortisseur jaune et un gris (2 amortisseurs pour bien supporter le poids du véhicule). Chaque roue arrière garde ainsi bien sa verticalité pour une fixation d’épaisseur 2 tenons ! On a ainsi un mécanisme rigide qui s’insère dans la cloison du camion et laisse libre la zone de chargement.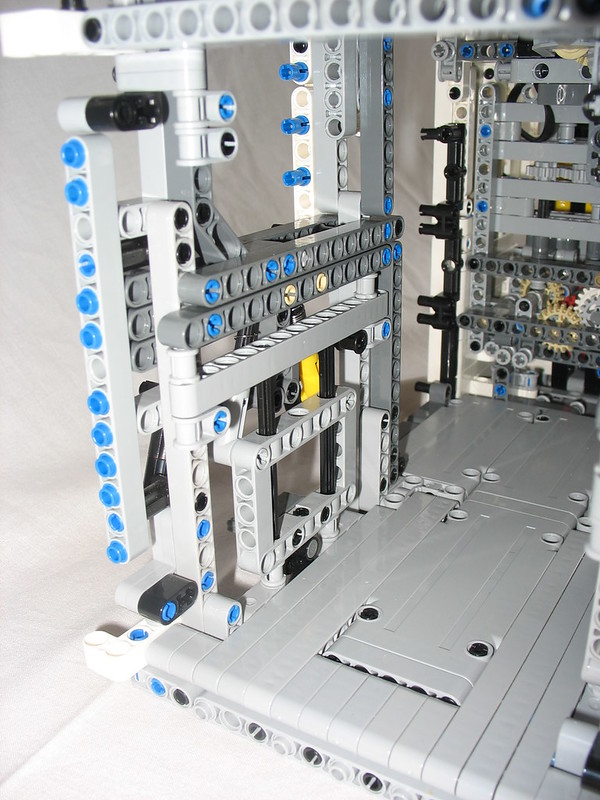
V) BV + moteur
Sur ce camion 4 mécanismes sont motorisés via une BV classique. Elle est situé derrière la cabine légèrement en dessous de l’assise des sièges. Elle est alimenté par un moteur L, un M n’étant pas assez puissant pour lever les panneaux solaires (voir fonction 4) lequel est situé juste au dessus de la BV. La rotation est transmise depuis le moteur par une 8T au contact d’un clutch dont l’axe entraîne une 16T qui vient à son tour faire tourner, de part et d’autre du moteur, deux 20T sur lesquels sont montés les driving ring des 4 « vitesses ».
Sur ce camion 4 mécanismes sont motorisés via une BV classique. Elle est situé derrière la cabine légèrement en dessous de l’assise des sièges. Elle est alimenté par un moteur L, un M n’étant pas assez puissant pour lever les panneaux solaires (voir fonction 4) lequel est situé juste au dessus de la BV. La rotation est transmise depuis le moteur par une 8T au contact d’un clutch dont l’axe entraîne une 16T qui vient à son tour faire tourner, de part et d’autre du moteur, deux 20T sur lesquels sont montés les driving ring des 4 « vitesses ».
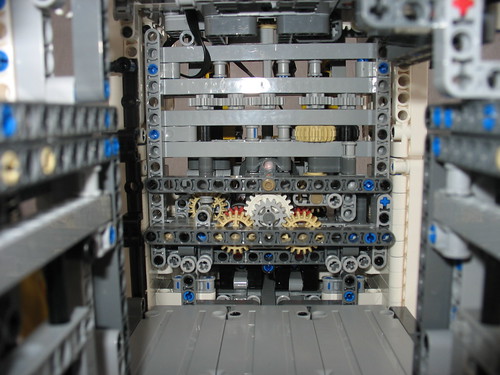
On change les vitesses par deux deux leviers « verticaux » situés entre les deux sièges. Ceux-ci sont reliés à deux bielles « horizontales » qui viennent déplacer par en dessous les changeover catch.
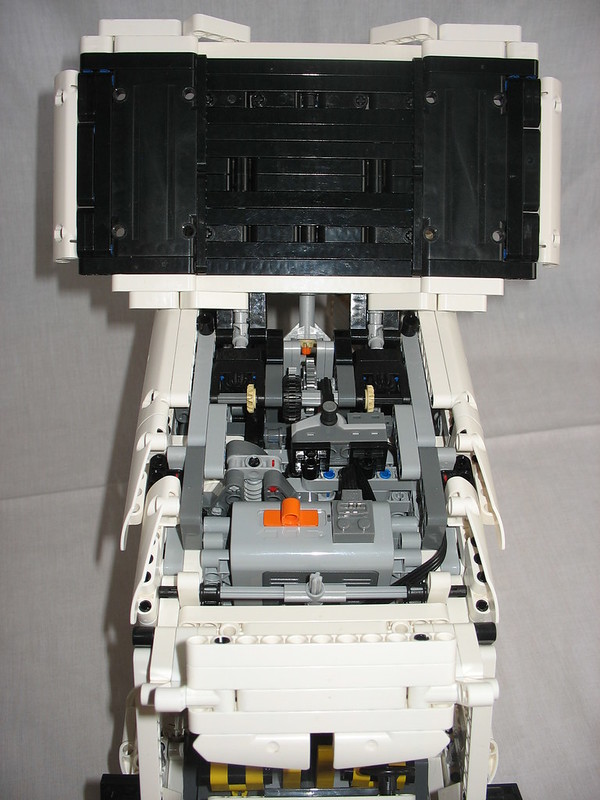
La Bbox est classique (la non-rechargeable donc), elle est placé elle aussi derrière la cabine au dessus du moteur L. Elle s’intègre à sa place par le dessus, le toit de la cabine étant escamotable à peu de frais (il faut juste retirer la HOG de la direction).
Enfin j’ai pu trouver une place pour un inverseur de polarité actionnable à travers le toit de la zone de chargement ce qui fait qu’il est possible de visualiser toutes les cinématiques de mécanismes avec le toit du camion refermé (voir sur la vidéo).
La Bbox est classique (la non-rechargeable donc), elle est placé elle aussi derrière la cabine au dessus du moteur L. Elle s’intègre à sa place par le dessus, le toit de la cabine étant escamotable à peu de frais (il faut juste retirer la HOG de la direction).
Enfin j’ai pu trouver une place pour un inverseur de polarité actionnable à travers le toit de la zone de chargement ce qui fait qu’il est possible de visualiser toutes les cinématiques de mécanismes avec le toit du camion refermé (voir sur la vidéo).

VI) fonctions 1 & 2 : les portes de cabine
Pour ce camion solaire l'idée de l'ouverture des portes est venue assez vite : ouverture électrique avec 4 bras horizontaux qui pivotent pour donner l’impression d’une porte qui coulisse vers l’arrière. Et comme ce camion devait être futuriste je me suis dis que ce serait bien de coupler l’ouverture avec une rotation du siège. A la vérité, avec quelques années de recul, ça n’apporte pas grand-chose ...mais c’est fun !
Les mécanismes des deux portes sont bien évidemment symétriques. Ils sont accessibles en poussant un levier de vitesse vers l’avant.
L’aspect délicat de cette fonction vient du couplage des deux mouvements : le siège pivote de 90° quand la porte elle ne pivote que de 75° environ. Comme je ne réussissais pas à trouver le bon engrènement compact assurant ces deux mouvements en même temps j’ai opté pour 2 clutchs par porte. Ainsi et le siège et la porte peuvent débrayer et ce avec un léger décalage (c’est peu visible sur la vidéo en raison de la vitesse du moteur L mais c’était plus net, et pas inélégant, dans la première version avec un moteur M).
Comment ca marche ? La 16T de sortie de boite fait tourner par en dessous une autre 16T se prolongeant par une VSF laquelle fait tourner un clutch_1 horizontal en prise avec une 8T (et ainsi pour cette 8T le clutch n’est qu’une simple 24T). Sur l’axe de cette 8T une 12T vient s’appuyer sur une 20T qui remonte vers une 12T et enfin un clutch_2 relié à l’un des bras 4L de la porte. Bien sûr en bout de course du bras le clutch_2 débraye mais toute la chaîne en amont est encore en mouvement. C’est pourquoi en dessous du clutch_1 qui tourne encore il y a une 12T (sur le même axe donc) puis une 20T dont l’axe remonte alors directement sur le siège. Lorsque le siège rencontre l’une des deux butées qui limite sa rotation entre 0° et 90° c’est alors ce clutch_1 qui débraye. Même s’il tourne encore et donc entraîne la chaîne d’engrenages jusqu’au clutch_2 ce dernier était de toute façon déjà débrayé. J'espère que c'est clair, parce que lorsque je me relis
.Pour ce camion solaire l'idée de l'ouverture des portes est venue assez vite : ouverture électrique avec 4 bras horizontaux qui pivotent pour donner l’impression d’une porte qui coulisse vers l’arrière. Et comme ce camion devait être futuriste je me suis dis que ce serait bien de coupler l’ouverture avec une rotation du siège. A la vérité, avec quelques années de recul, ça n’apporte pas grand-chose ...mais c’est fun !
Les mécanismes des deux portes sont bien évidemment symétriques. Ils sont accessibles en poussant un levier de vitesse vers l’avant.
L’aspect délicat de cette fonction vient du couplage des deux mouvements : le siège pivote de 90° quand la porte elle ne pivote que de 75° environ. Comme je ne réussissais pas à trouver le bon engrènement compact assurant ces deux mouvements en même temps j’ai opté pour 2 clutchs par porte. Ainsi et le siège et la porte peuvent débrayer et ce avec un léger décalage (c’est peu visible sur la vidéo en raison de la vitesse du moteur L mais c’était plus net, et pas inélégant, dans la première version avec un moteur M).
Comment ca marche ? La 16T de sortie de boite fait tourner par en dessous une autre 16T se prolongeant par une VSF laquelle fait tourner un clutch_1 horizontal en prise avec une 8T (et ainsi pour cette 8T le clutch n’est qu’une simple 24T). Sur l’axe de cette 8T une 12T vient s’appuyer sur une 20T qui remonte vers une 12T et enfin un clutch_2 relié à l’un des bras 4L de la porte. Bien sûr en bout de course du bras le clutch_2 débraye mais toute la chaîne en amont est encore en mouvement. C’est pourquoi en dessous du clutch_1 qui tourne encore il y a une 12T (sur le même axe donc) puis une 20T dont l’axe remonte alors directement sur le siège. Lorsque le siège rencontre l’une des deux butées qui limite sa rotation entre 0° et 90° c’est alors ce clutch_1 qui débraye. Même s’il tourne encore et donc entraîne la chaîne d’engrenages jusqu’au clutch_2 ce dernier était de toute façon déjà débrayé. J'espère que c'est clair, parce que lorsque je me relis
Et en plus la photo est peu parlante car je ne voulais pas tout démonter .

VII) fonction 3 : les panneaux solaires
Je souhaitais pour cette fonction pouvoir « déployer » des panneaux solaires depuis le toit du camion. Il y avait à nouveau deux mouvements à coordonner, mouvements qui n’ont, par ailleurs, pas du tout la même vitesse d’exécution : un premier d’élévation des panneaux depuis la position horizontale couchée jusqu’à une inclinaison d’environ 50° d’une part et un second « d’ouverture latérale » des panneaux.Ce mécanisme est sélectionnable en poussant le levier conducteur vers l’arrière.
Les panneaux sont composés de 3 parties : un rectangle plat sur lequel vient s’appuyer le mécanisme d’inclinaison (un mini-LA en l’occurrence) et deux 1/2 panneaux mobiles qui viennent s’appuyer sur le rectangle en dessous. Ceux-ci sont guidés par en dessous via 2 axes de 12 chacun ce qui assurent qu’ils ne peuvent que se translater du centre vers extérieur.
Chaque 1/2 panneau se décale de 6 tenons vers l’extérieur ce qui fait que l’ensemble passe de 19 tenons de large en position fermée à 31 tenons en position ouverte, soit une surface de captation solaire raisonnable.
Le mouvement de translation des 1/2 rectangles est assuré par la rotation d’un liftarm 4L accroché sur son axe de rotation au rectangle en dessous et fixé à l’autre bout sur un 1/2 panneau.
Je souhaitais pour cette fonction pouvoir « déployer » des panneaux solaires depuis le toit du camion. Il y avait à nouveau deux mouvements à coordonner, mouvements qui n’ont, par ailleurs, pas du tout la même vitesse d’exécution : un premier d’élévation des panneaux depuis la position horizontale couchée jusqu’à une inclinaison d’environ 50° d’une part et un second « d’ouverture latérale » des panneaux.Ce mécanisme est sélectionnable en poussant le levier conducteur vers l’arrière.
Les panneaux sont composés de 3 parties : un rectangle plat sur lequel vient s’appuyer le mécanisme d’inclinaison (un mini-LA en l’occurrence) et deux 1/2 panneaux mobiles qui viennent s’appuyer sur le rectangle en dessous. Ceux-ci sont guidés par en dessous via 2 axes de 12 chacun ce qui assurent qu’ils ne peuvent que se translater du centre vers extérieur.
Chaque 1/2 panneau se décale de 6 tenons vers l’extérieur ce qui fait que l’ensemble passe de 19 tenons de large en position fermée à 31 tenons en position ouverte, soit une surface de captation solaire raisonnable.
Le mouvement de translation des 1/2 rectangles est assuré par la rotation d’un liftarm 4L accroché sur son axe de rotation au rectangle en dessous et fixé à l’autre bout sur un 1/2 panneau.
La transmission du mécanisme se fait comme suit depuis la BV :
la 16T de sortie de boite entraîne une 20T qui renvoie verticalement le mouvement via une 12T plate. s’ensuivent alors 3 16T qui permette de recentrer le mouvement au milieu du camion.Une seconde 12T plate fait un renvoi d’angle à l’horizontale via une 20T qui passe par une VSF et continue en prise directe sur le trinôme classique 12Tplate +20Tplate +12Tplate du mini-LA lequel assure le mécanisme d’inclinaison.
La VSF transmet, quant à elle, le mécanisme pour l’ouverture des 1/2 panneaux en réduisant fortement la vitesse de rotation. Elle fait ainsi tourner une 24T prolongée sur son axe par une 16T faisant tourner une 20T laquelle transmet la rotation sur son axe à deux 12T plates. Celles-ci, par renvoi d’angle avec une 12T chacun, dédoublent le mouvement vers les liftarm 4L. Juste avant les 4L des cardans sont intégrés pour assurer la bonne transmission de l’ouverture des panneaux indépendamment de l’inclinaison.
Ce mécanisme est débrayé via le clutch juste après le moteur L et donc en amont de la BV. Il ne sert d’ailleurs que pour ce mécanisme.
L’amplitude du mécanisme d’ouverture est légèrement plus faible que l’amplitude du mécanisme d’inclinaison ce qui fait que l’inclinaison y perd quelques degrés (ce qui n’est pas grave l’inclinaison atteint déjà les 50° ce qui est un max pour des panneaux solaires) et en contrepartie le mécanisme global débraye avant que le mini-LA ne fasse ces horribles craquements. Un plus apprécié.
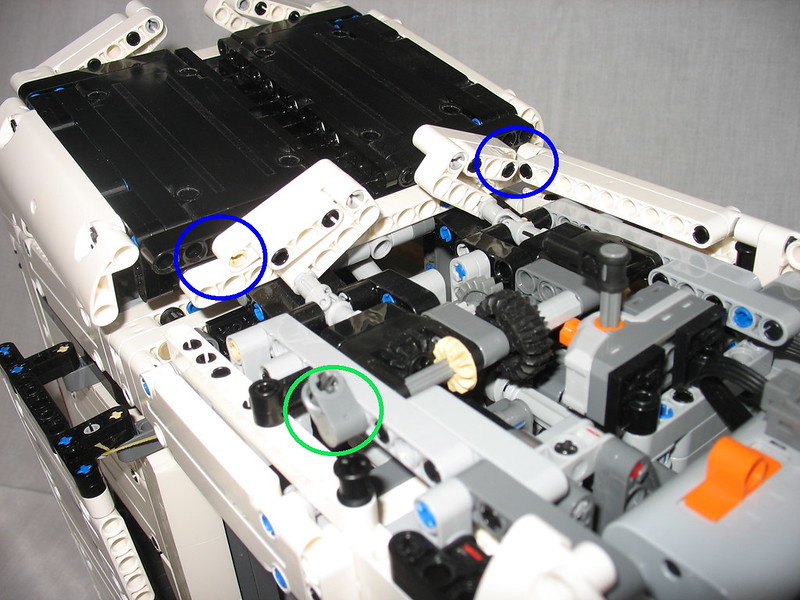
A noter que ces panneaux doivent être montés très minutieusement en deux points.
D’abord il faut que les 1/2 panneaux soient en position fermée avant que le rectangle soit en position horizontale juste ce qu’il faut pour que le jeu dans les pièces permette malgré tout de ne pas verrouiller le mécanisme et ainsi permettre au rectangle de descendre jusqu’à l’horizontale. Sans cela les bras de fermeture des 1/2 panneaux frotteraient contre la coque supérieure extérieure ce qui forcerait sur le mécanisme (dans les deux ronds bleus sur la photo ci-dessous).
Ensuite il est nécessaire que les deux 1/2 panneaux s’ouvrent de manière synchrone sinon c’est laid et surtout ça force sur le moteur. Autrement dit les liftarm 4L doivent avoir des positions strictement symétriques. Ce réglage est assuré par un axe 8 avec stop sur l’un des deux renvois d’angle que l’on peut enlever et remettre à l’envie pour repositionner de la bonne manière la 12T plate sur cet axe (dans le rond vert).
la 16T de sortie de boite entraîne une 20T qui renvoie verticalement le mouvement via une 12T plate. s’ensuivent alors 3 16T qui permette de recentrer le mouvement au milieu du camion.Une seconde 12T plate fait un renvoi d’angle à l’horizontale via une 20T qui passe par une VSF et continue en prise directe sur le trinôme classique 12Tplate +20Tplate +12Tplate du mini-LA lequel assure le mécanisme d’inclinaison.
La VSF transmet, quant à elle, le mécanisme pour l’ouverture des 1/2 panneaux en réduisant fortement la vitesse de rotation. Elle fait ainsi tourner une 24T prolongée sur son axe par une 16T faisant tourner une 20T laquelle transmet la rotation sur son axe à deux 12T plates. Celles-ci, par renvoi d’angle avec une 12T chacun, dédoublent le mouvement vers les liftarm 4L. Juste avant les 4L des cardans sont intégrés pour assurer la bonne transmission de l’ouverture des panneaux indépendamment de l’inclinaison.
Ce mécanisme est débrayé via le clutch juste après le moteur L et donc en amont de la BV. Il ne sert d’ailleurs que pour ce mécanisme.
L’amplitude du mécanisme d’ouverture est légèrement plus faible que l’amplitude du mécanisme d’inclinaison ce qui fait que l’inclinaison y perd quelques degrés (ce qui n’est pas grave l’inclinaison atteint déjà les 50° ce qui est un max pour des panneaux solaires) et en contrepartie le mécanisme global débraye avant que le mini-LA ne fasse ces horribles craquements. Un plus apprécié.
A noter que ces panneaux doivent être montés très minutieusement en deux points.
D’abord il faut que les 1/2 panneaux soient en position fermée avant que le rectangle soit en position horizontale juste ce qu’il faut pour que le jeu dans les pièces permette malgré tout de ne pas verrouiller le mécanisme et ainsi permettre au rectangle de descendre jusqu’à l’horizontale. Sans cela les bras de fermeture des 1/2 panneaux frotteraient contre la coque supérieure extérieure ce qui forcerait sur le mécanisme (dans les deux ronds bleus sur la photo ci-dessous).
Ensuite il est nécessaire que les deux 1/2 panneaux s’ouvrent de manière synchrone sinon c’est laid et surtout ça force sur le moteur. Autrement dit les liftarm 4L doivent avoir des positions strictement symétriques. Ce réglage est assuré par un axe 8 avec stop sur l’un des deux renvois d’angle que l’on peut enlever et remettre à l’envie pour repositionner de la bonne manière la 12T plate sur cet axe (dans le rond vert).
VIII) fonction 4 : la porte latérale
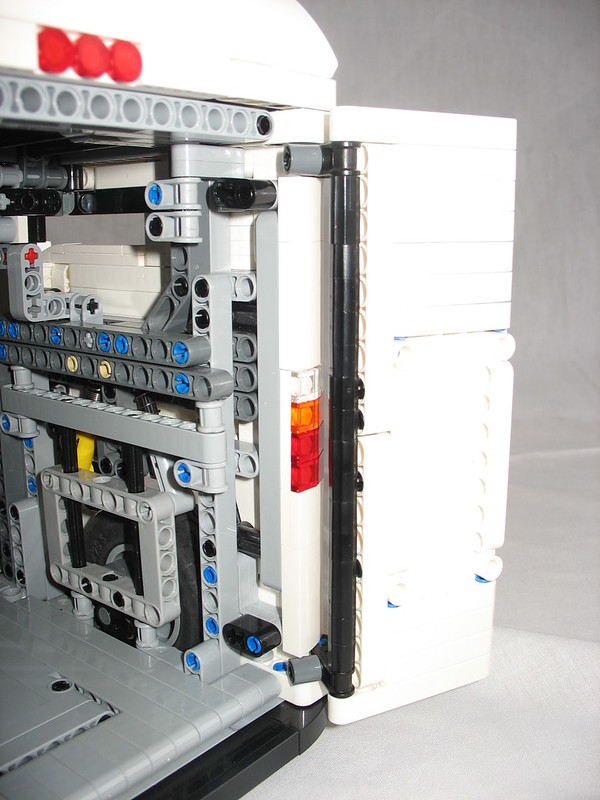
Il s’agit ici de recréer le mécanisme d’ouverture d’une porte coulissante en deux phases, la coulisse de la porte vers l’arrière ET la sortie préalable de ladite porte de la paroi.
C’est très clairement la fonction qui a été la plus difficile à concevoir, j’ai fait des dizaines et des dizaines d’essai, j’ai souvent cru que ce ne serait pas possible... ...Pour obtenir finalement un bon mouvement, régulier et fluide. Je n'en suis pas peu fier .gif "8)") .
.
Tout d’abord la fixation du mécanisme : si je pensais au début créer un mécanisme haut et un mécanisme bas j’ai très vite déchanté : il n’y a pas la place au sol sauf à concevoir un plancher arrière d’au moins 4 tenons de haut, une telle marche pour entrer dans la zone de chargement ça la fout mal !
Du coup fixation haute uniquement. Soit. Mais alors, et je ne l’ai pas vu tout de suite, la porte va avoir beaucoup de jeu et, de par son poids propre, ne va pas garder la verticale. Et comme j’ai pu le constater par la suite cela induit un frottement en bas de porte (à l’ouverture comme à la fermeture). Pour pallier à cela j’utilise un élastique qui va contrebalancer le poids de la porte et lui redonner un peu de verticalité.
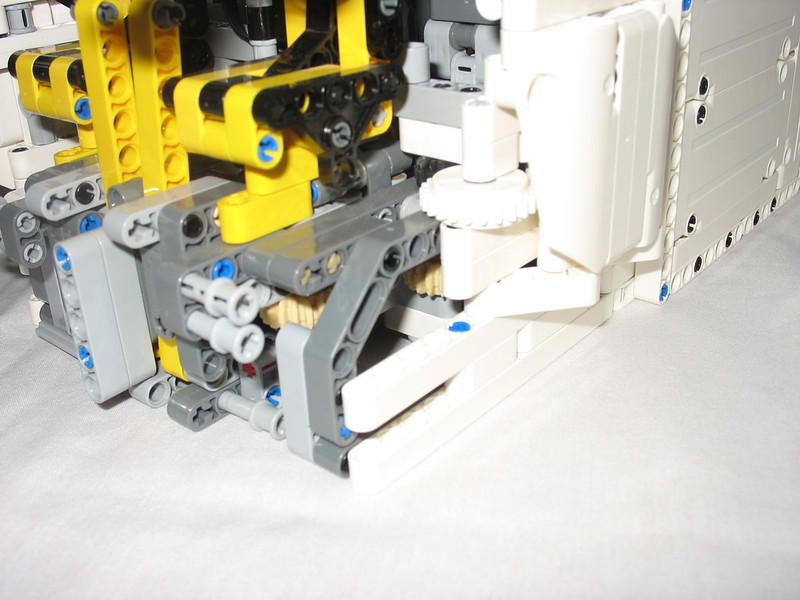
Le mécanisme en lui-même est composé d’un « wagon » qui coulisse sur 2 rails fixes constitués d’axe de 12. Le système d’accroche axe/trou est ainsi relativement compact. Une crémaillère de 13 fixée au wagon lui permet de coulisser sur sur rails.Entre la BV et le wagon il y a le duo VSF + clutch qui asure et l’irréversibilité du mouvement et son débrayage.
En dessous du wagon une paire de bras mobiles (en liftarm 3X5 L) vient former avec la porte en elle-même un parallélogramme déformable.
Lorsque le wagon recule vers l’arrière les bras mobiles rencontrent une butée qui les fait pivoter de 90° assurant ainsi l’ouverture de la porte. La butée se prolongeant par une barre, les bras sont bloqués en position ouverte et le wagon transmet alors la totalité de son mouvement vers l’arrière à la porte : la porte s’ouvre.
Pour la fermeture de la porte le mécanisme est le même à ceci près que la butée n’en est plus une dans ce sens. L’élastique évoqué précédemment ressert ici et garantit alors le contact butée/bras permettant ainsi aux bras de pivoter à présent de -90° pour refermer la porte.
Une butée « classique » n’était pas possible ça rendait la rotation des bras trop brutale et irrégulière alors qu’avec cette brique le mouvement est fluide et régulier.
le mouvement est fluide et régulier.
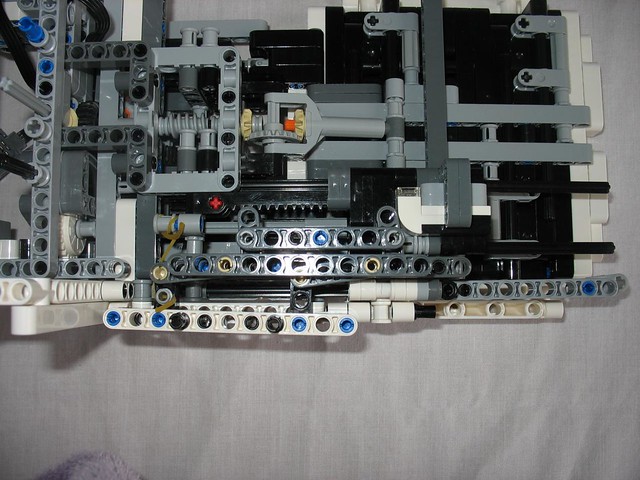
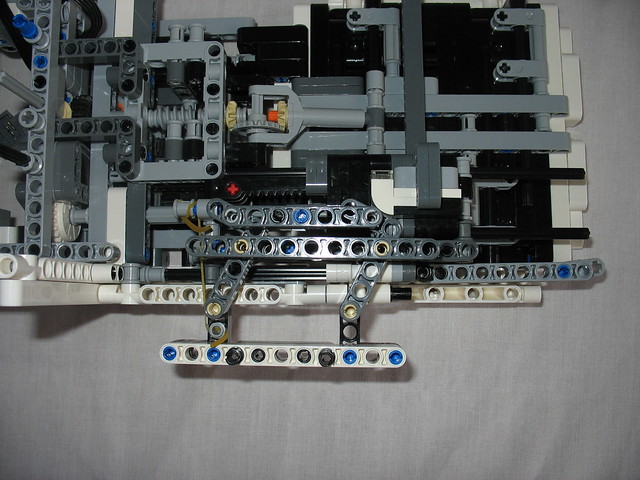
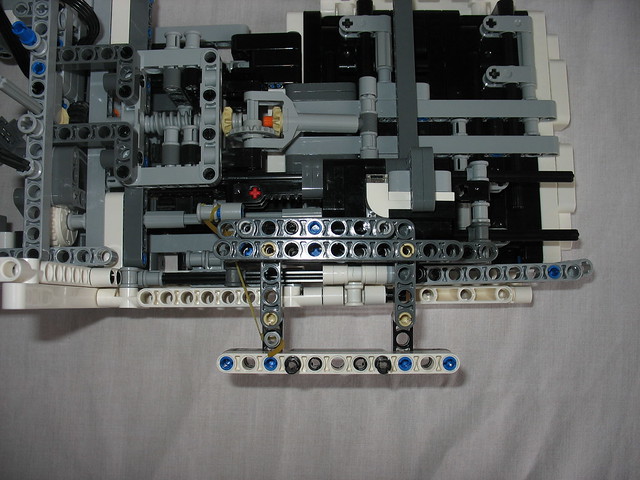
L'adage populaire dit qu'une image vaut mille mots, je vous en propose 3, prises par en dessous, pour illustrer ce mouvement :
Il s’agit ici de recréer le mécanisme d’ouverture d’une porte coulissante en deux phases, la coulisse de la porte vers l’arrière ET la sortie préalable de ladite porte de la paroi.
C’est très clairement la fonction qui a été la plus difficile à concevoir, j’ai fait des dizaines et des dizaines d’essai, j’ai souvent cru que ce ne serait pas possible...
...Pour obtenir finalement un bon mouvement, régulier et fluide. Je n'en suis pas peu fier .Tout d’abord la fixation du mécanisme : si je pensais au début créer un mécanisme haut et un mécanisme bas j’ai très vite déchanté : il n’y a pas la place au sol sauf à concevoir un plancher arrière d’au moins 4 tenons de haut, une telle marche pour entrer dans la zone de chargement ça la fout mal !
Du coup fixation haute uniquement. Soit. Mais alors, et je ne l’ai pas vu tout de suite, la porte va avoir beaucoup de jeu et, de par son poids propre, ne va pas garder la verticale. Et comme j’ai pu le constater par la suite cela induit un frottement en bas de porte (à l’ouverture comme à la fermeture). Pour pallier à cela j’utilise un élastique qui va contrebalancer le poids de la porte et lui redonner un peu de verticalité.
Le mécanisme en lui-même est composé d’un « wagon » qui coulisse sur 2 rails fixes constitués d’axe de 12. Le système d’accroche axe/trou est ainsi relativement compact. Une crémaillère de 13 fixée au wagon lui permet de coulisser sur sur rails.Entre la BV et le wagon il y a le duo VSF + clutch qui asure et l’irréversibilité du mouvement et son débrayage.
En dessous du wagon une paire de bras mobiles (en liftarm 3X5 L) vient former avec la porte en elle-même un parallélogramme déformable.
Lorsque le wagon recule vers l’arrière les bras mobiles rencontrent une butée qui les fait pivoter de 90° assurant ainsi l’ouverture de la porte. La butée se prolongeant par une barre, les bras sont bloqués en position ouverte et le wagon transmet alors la totalité de son mouvement vers l’arrière à la porte : la porte s’ouvre.
Pour la fermeture de la porte le mécanisme est le même à ceci près que la butée n’en est plus une dans ce sens. L’élastique évoqué précédemment ressert ici et garantit alors le contact butée/bras permettant ainsi aux bras de pivoter à présent de -90° pour refermer la porte.
Une butée « classique » n’était pas possible ça rendait la rotation des bras trop brutale et irrégulière alors qu’avec cette brique
le mouvement est fluide et régulier.L'adage populaire dit qu'une image vaut mille mots, je vous en propose 3, prises par en dessous, pour illustrer ce mouvement :
Tel quel le mécanisme était presque fonctionnel : lors de la phase de fermeture de porte en fin de mouvement de rentrée dans le chambranle l’arête arrière de la porte avait tendance à accrocher l’angle saillant dudit chambranle. Si réduire la largeur de la porte d’un tenon pour y pallier était techniquement faisable c’était en revanche esthétiquement très discutable, notamment en position fermée, une grande saignée verticale apparaissant alors entre l’arête de la porte et le châssis. Beurk ! 
A la place j’ai préféré créer des arêtes, de porte comme de châssis, en biseau grâce à des slopes : 1X2X2/3 tout le long de l’arête de la porte et curved 2X4X2/3 sur le châssis de la porte.
Ainsi plus d’accrochage à la fermeture et, en bonus, à l’ouverture le contact entre les biseaux favorise la sortie de la porte en initiant le début de la rotation des bras.
A la place j’ai préféré créer des arêtes, de porte comme de châssis, en biseau grâce à des slopes : 1X2X2/3 tout le long de l’arête de la porte et curved 2X4X2/3 sur le châssis de la porte.
Ainsi plus d’accrochage à la fermeture et, en bonus, à l’ouverture le contact entre les biseaux favorise la sortie de la porte en initiant le début de la rotation des bras.

Dernier point, l’ensemble du mécanisme étant très sensible aux frottements, il a fallu limiter au maximum les contacts. C’est pour cela que le biseau du châssis est fait avec un slope curved cela donne une ligne de contact plutôt qu’une surface de contact. C’est pour cela aussi que le bas de la porte n’est pas une simple barre de 11 mais plutôt un duo plate + tile, légèrement moins haut qu’une barre.
IX) conclusion
Avec ce MOC l’objectif initial est atteint.
J’ai ainsi grandement appris tant au niveau de l’utilisation des pièces que du pourquoi de tel ou tel mécanisme. J’ai également découvert des méthodologies à mettre en place pour (bien) MOCer, notamment construire modulaire et minimaliste, ca permet de faire des ajustements sans tout re-démonter.
Une dure leçon à apprendre : il ne sert à rien de « bricoler » sur une base que l’on sait moyenne, il est plus rapide de repartir de 0 . Je dis ca mais lorsque, à 80 % fini, j’ai tout repris depuis le début j’en avais gros sur la patate
. Je dis ca mais lorsque, à 80 % fini, j’ai tout repris depuis le début j’en avais gros sur la patate  . Et sans cela le MOC serait clairement moins satisfaisant aujourd’hui !
. Et sans cela le MOC serait clairement moins satisfaisant aujourd’hui !
Si le chemin fut long et escarpé j’ai pu (me) prouver que c’était possible, et par là-même repousser mes limites en Lego !!
Enfin et surtout, surtout, j’y ai pris énormément de plaisir !!
Merci de votre lecture.
IX) conclusion
Avec ce MOC l’objectif initial est atteint.
J’ai ainsi grandement appris tant au niveau de l’utilisation des pièces que du pourquoi de tel ou tel mécanisme. J’ai également découvert des méthodologies à mettre en place pour (bien) MOCer, notamment construire modulaire et minimaliste, ca permet de faire des ajustements sans tout re-démonter.
Une dure leçon à apprendre : il ne sert à rien de « bricoler » sur une base que l’on sait moyenne, il est plus rapide de repartir de 0
. Je dis ca mais lorsque, à 80 % fini, j’ai tout repris depuis le début j’en avais gros sur la patate . Et sans cela le MOC serait clairement moins satisfaisant aujourd’hui !Si le chemin fut long et escarpé j’ai pu (me) prouver que c’était possible, et par là-même repousser mes limites en Lego !!
Enfin et surtout, surtout, j’y ai pris énormément de plaisir !!
Merci de votre lecture.
X) vidéo











.gif ":)")

 !!
!!
 , ca doit altérer ma vision des choses.
, ca doit altérer ma vision des choses.