






.gif ";)")

Le but étant de construire le moc le plus petit d'un chargeur sur pneus, intégrant les éléments électriques pour avoir :
-propulsion sur l'essieu avant
-direction sur l'essieu arrière
-levage de la fourche
-inclinaison de la fourche
Cela est rendu possible par le choix d'un chargeur de petite taille en vrai, pour faire correspondre l’échelle des roues à celle de la cabine et du corps principal. Plus la battery Lipo, qui en plus d'être compact et légère (pourquoi ai-je tant attendu à me l'offrir !). Elle loge tout naturellement à l'arrière en travers.
Pour les fonctions, rien de bien sorcier, mais c'est quand même très serré la dedans, il n'y a pas un espace de libre (si un mais blindé de cable du coup ^^), l'idée n'a pas été de construire le chassis puis de mettre les moteurs dedans, mais bien l'inverse, çad faire les mécanisme de transmission, direction, levage et inclinaison de la fourche le plus compact et de construire autour ! Ce qui explique le choix de la fourche au lieu du godet car aucun ne collait finalement à l'échelle.

C'est un peu analogue à la construction de la supercar ou pour moi il ne faut plus commencer par le chassis mais le design car c'est l'element central du projet et donc le plus dure. Ici j'ai commencé par la miniaturisation des mécanismes car c'était le plus dure à faire (en me basant sur une taille de roue raisonnable pour conserver une échelle moyenne).
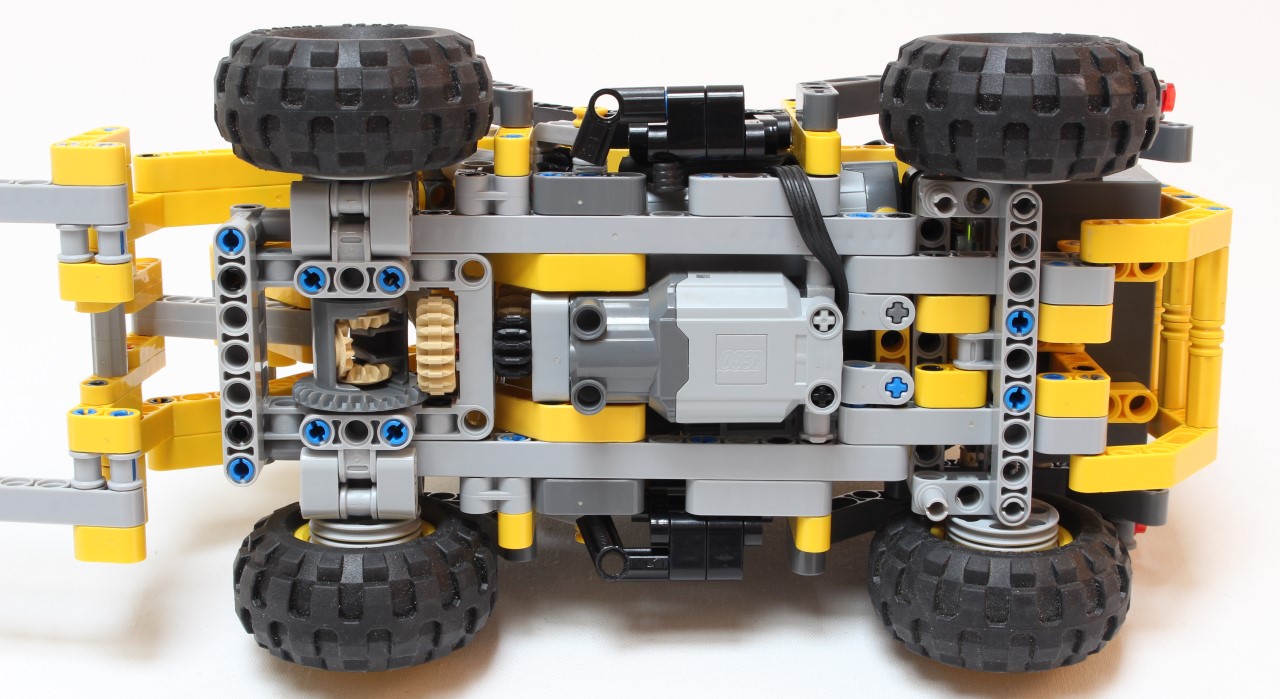
Au final au niveau fonction, la propulsion est assurée par un moteur L avec 12/20 et 20/diff ce qui fait une vitesse plutot rapide, qui nécessite de driver à la télécommande proportionnelle si on veut être précis. La direction se fait avec un servo moteur décalé en direct 12t/crémaillère, que de surprise ^^

Au niveau de levage, il est assuré par un moteur M, qui placé à coté su servo et grace à un renvoi d'angle fait tourner un axe de part en part du moc, opérant les deux mini LA. La vitesse est bonne et la force y est. C'est la première fois que j'utilise ces petits vérins et ma foi ils sont pas mal ! L'inclinaison de la fourche est aussi gérer avec un moteur M et un mini LA. Le moteur M est placé au sommet de tout les autres, sous le siège. A noter que le système d'inclinaison est à pivot décalé (type mécanisme Z) ce qui permet de garder une inclinaison presque constante lorsque la fourche se lève, c'est un petit plus bien pratique pour la jouabilité.
Vous pouvez voir la densité de moteur là.

La vidéo :
Au final, le moc est très jouable, répond très bien. Le choix au final de la fourche est plus jouable que le godet je trouve, ça évite d'en mettre partout, on peut prendre et déposer la palette. Au niveau construction, je suis content car tout fonctionne bien, c'est très serré la dedans, en gardant un design et des détails corrects (l’empattement est un peu court, les IR receiver à l'arrière gâche un peu le tableau, le siege est trop haut, mais c'est des détails). Au final je me suis bien éclaté à faire cet engin de chantier, ce qui ma motivé à en faire pourquoi pas d'autre pendant un temps.
.gif ":)")












 Le moteur L semble possible à reculer...
Le moteur L semble possible à reculer...

{kind=link}