


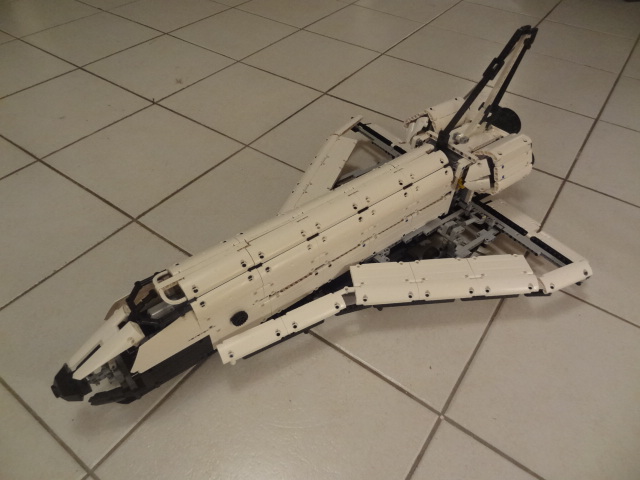
Comme d'habitude quand je participe à un concours TL (rarement donc), je suis limite limite...mais à l'heure ! Voici donc mon entrée pour ce concours:
J'ai commencé peu après le début du concours à travailler le design sous LDD, histoire d'avoir une idée des pièces dont j'allais avoir besoin. Et j'ai bien fait, mon stock n'aurait pas suffi.... J'ai donc acheté une vingtaine de panels divers, en blanc bien évidemment. Et puis plus rien pendant plus de 2 mois, pas de temps. J'ai repris il y a 3 semaines, puis une coupure la semaine passée pour cause de vacances loin de mes Lego, et reprise hier soir pour finaliser...les 40% restants
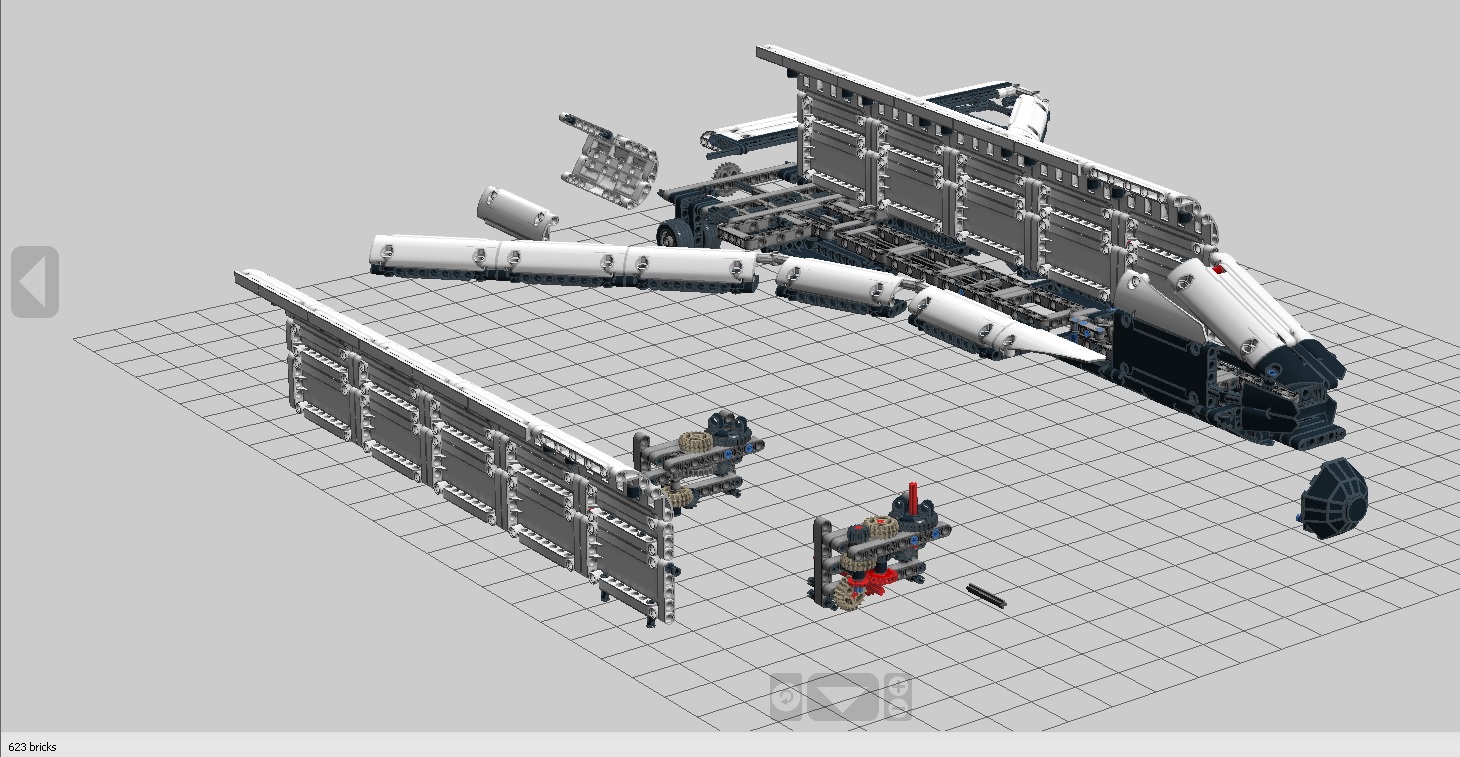
 Le modèle fait environ 50cm80cm de long.
Le modèle fait environ 50cm80cm de long.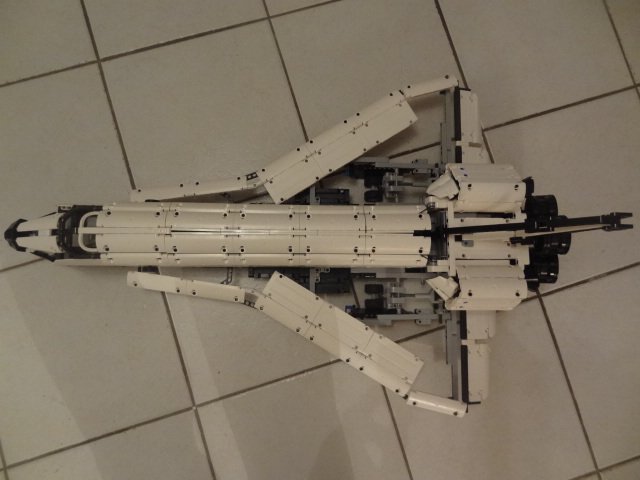



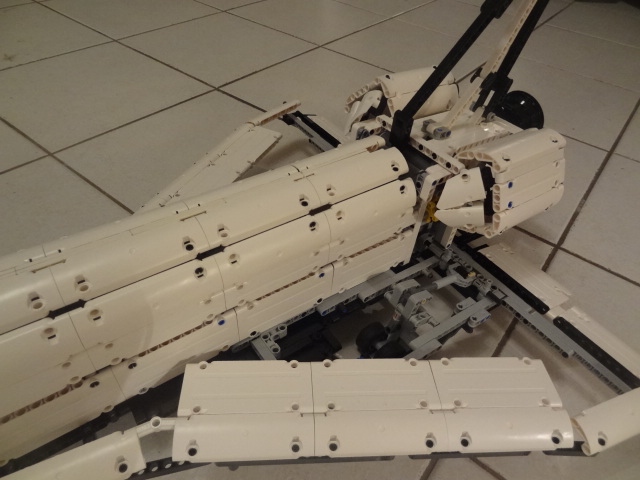
Vous me direz que les ailes ne sont pas complètement remplies de panels, mais j'étais à cours de munitions...J'ai donc préféré faire les bords d'attaque des ailles. Je ne suis d'ailleurs par convaincu que tout remplir aurait été plus beau. J'ai par contre voulu que la soute soit entièrement carénée, et je la trouve assez réussie. Vous noterez la présence de tile 1x8 blanc pour faire une jonction propre entre les deux pans de la soute (cf. photo ci-dessous).
Les trains d'atterrissage se déploient exactement de la même façon que sur la vraie navette. Leur mouvement est réalisé à l'aide de mLA (un par train).
La BV4 est située derrière le cockpit, comme sur la 8480. D'où la rallonge PFS suggérée par Anio dans le sujet puisque le boîtier à piles est situé à l'arrière.
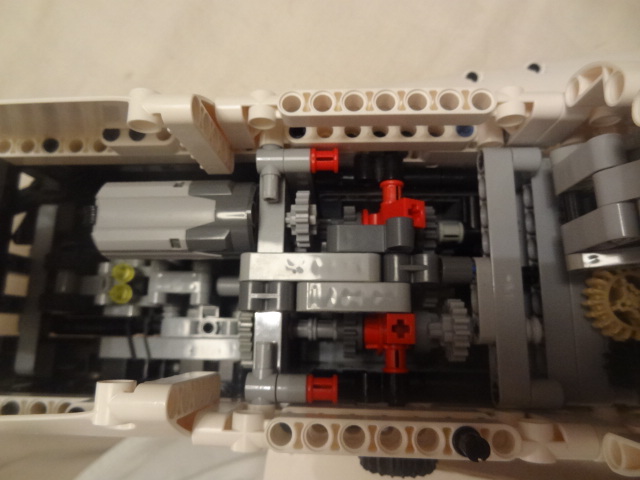
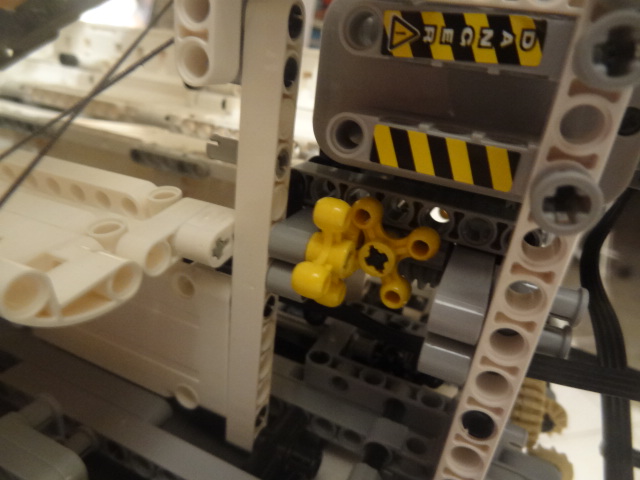
Elle est alimentée par un moteur M situé dans le cockpit. Les 2 changeover catch sont pilotés via 2 pignons noirs situés sur chaque côté de la navette, juste derrière le cockpit.
C'est la première fois que je réalise une boîte de vitesses, et j'ai pas mal galéré. Au final, elle est d'ailleurs d'une efficacité assez moyenne. Quand il y a trop d'effort, les pignons ont tendance à craquer. C'est d'autant plus vrai depuis que j'ai partiellement démonté l'ensemble pour le décompte cet après-midi. J'ai du mal remonter quelque chose, et au final je n'arrive plus à sortir les trains sans un craquement horrible et continu...alors que le rentrée se passe très bien. C'est d’ailleurs pour ça qu'il n'y a que la rentrée des trains sur la vidéo au bas de cette revue. Problème identique pour la rotation du bras (dans un sens tout va bien, pas dans l'autre...), alors que l'ouverture et la fermeture de la soute se passent sans problème, de même que la montée/descente du bras. Bref, une V2 de cette BV4 s'imposerait. Mais elle n'existera pas, je me ferai la main sur un prochain MOC
.gif ":)")
Les tuyères sont réalisées à l'aide de grosses jantes, comme on pouvait s'y attendre. L'idéal aurait été d'avoir 3 tailles de jantes pour réaliser un cône, mais je n'avais que 2 exemplaires (sur le Tumbler) de la jante intermédiaire. J'ai donc choisi de suggérer la forme en laissant un espace entre la petite jante et la grosse (celle du la voiture 42039). Et le rendu est très satisfaisant.
Petite astuce qui m'a bien plu: la tuyère du centre en haut permet de piloter l'interrupteur PFS
 En la tournant, on actionne l'interrupteur positionné derrière. La jouabilité est excellente avec une poignée aussi grande !
En la tournant, on actionne l'interrupteur positionné derrière. La jouabilité est excellente avec une poignée aussi grande !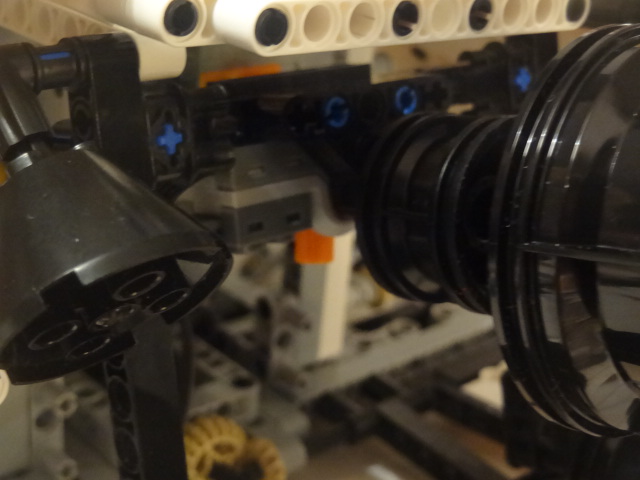
Quant au boîtier à piles, il s'enlève facilement en dé-clipsant les 2 grosses parties à l'arrière de l'engin:
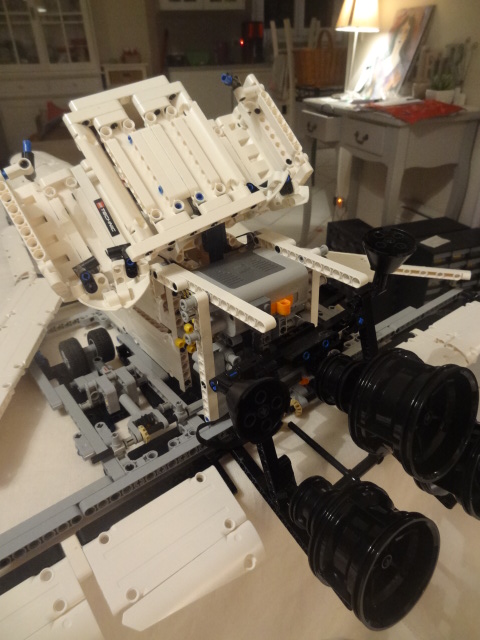
La soute s'ouvre à environ 95°, presque comme sur la navette réelle.
Le satellite en lui-même est relativement grand, bien que simple dans sa conception. Outre les 2 panneaux solaires classiques, j'ai ajouté une antenne déployable comme on trouve sur beaucoup d'anciennes sondes. Le tout se déploie en actionnant le petit pignon noir situé à l'arrière, lui-même entraînant une vis sans fin reliée à 3 pignons 24T gris.

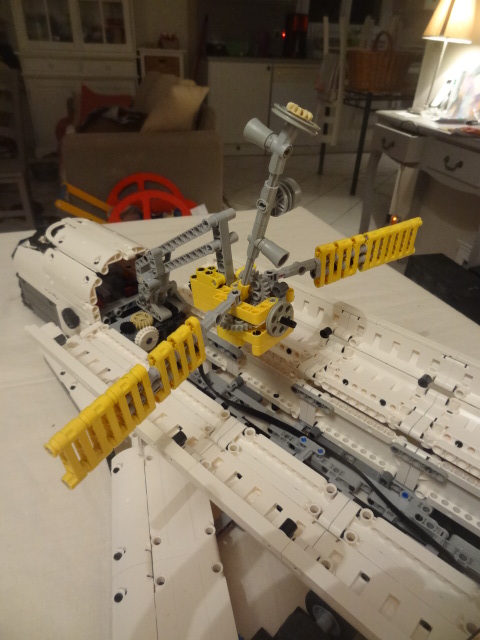
Le bras est décalé sur le côté de la soute. Il est basé sur une mini turntable à travers laquelle passe un axe relié au mLA permettant le levage du bras.

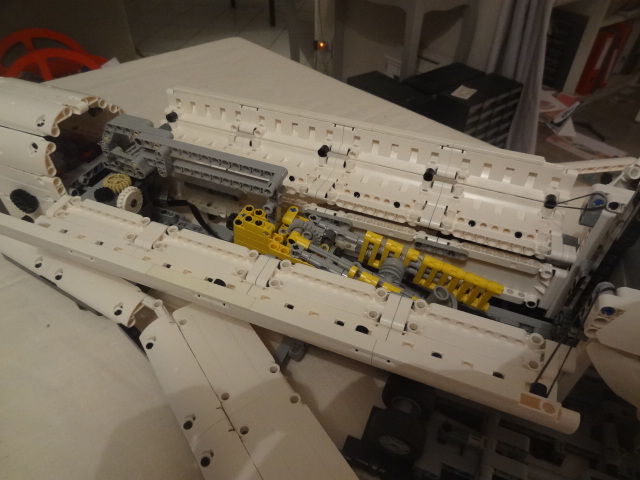
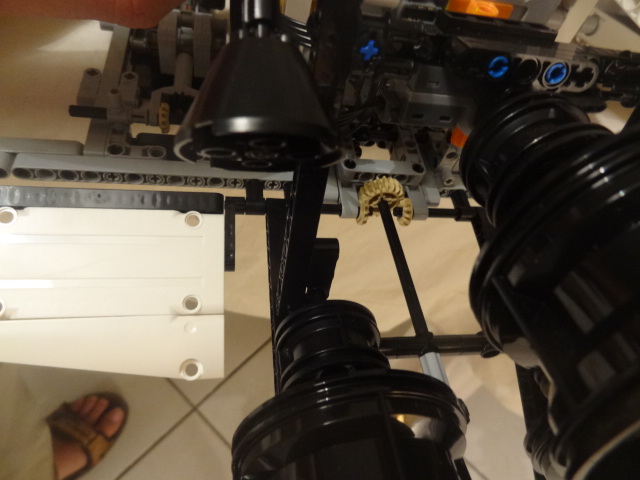
Sur la photo ci-dessus, l'axe que l'on distingue au centre du châssis dans le bas de la soute apporte le mouvement rotatif vers les trains arrières. L'autre axe supportant le petit pignon 8T entraîné par le clutch apporte lui le mouvement vers l'arrière de la navette, pour l'ouverture des deux panneaux. Il entraîne une vis sans fin, qui elle-même entraîne un pignon 8T relié à des knobs:
Vous avez peut-être remarqué la présence d'un élastique noir en haut à gauche de la photo ci-dessus. Il est là pour faciliter la remontée du panneau, vu le poids de ce dernier. Il y en a un par panneau.
La seconde fonction manuelle du MOC, le mouvement des ailerons, est réalisée tout simplement via un axe discret situé entre les 2 grosses tuyères inférieures. Il entraîne un pignon qui par renvoi d'angle fait monter ou descendre l'aileron.
Enfin concernant les trains d'atterrissage, on voit bien leur cinématique sur la vidéo. Elle est plutôt simple mais conforme à l'original. Petit plus: j'ai ajouté pour chaque train l'ouverture/fermeture de la trappe d'accès. En s'abaissant, le train pousse le trappe (en 2 parties pour le train avant). La remontée de chaque trappe est assurée par un petit élastique dès que le train correspondant est refermé. Le rendu est particulièrement sympa pour le train avant, en raison notamment du carénage très propre ne laissant aucun espace entre les 2 trappes. L'inconvénient de ce petit plus visuel est que l'effort demandé pour l'ouverture du train est plus important, puisqu'en plus du train lui-même, il faut déployer une trappe retenue par un élastique.
Je suis globalement satisfait du MOC, même si plusieurs points mériteraient d'être améliorés, voire retravaillés en profondeur. Mais toutes les fonctions demandées dans le sujet du concours sont là.
Les +:
- Design général, notamment la soute.
- Intégration de l'interrupteur PFS.
- Intégration du boîtier à piles, facilement retirable.
- Le satellite, plus qu'une simple petite boîte, avec 2 panneaux solaires et une antenne.
Les -:
- La BV4, qui a du mal a encaisser les efforts.
- Le châssis, qui mériterait d'être robustifié.
- Le mécanisme d'ouverture des trappes des 3 trains d'atterrissage qui, bien que fonctionnel, demande trop d'effort.










 bonne chance
bonne chance .gif ";)")


 aurait sûrement pu améliorer le design.
aurait sûrement pu améliorer le design.
.gif "8)")
 Blague à part tu as raison, mais j'explique la raison dans ma revue. De là à dire que c'est choquant, je comprends ton point de vue mais c'est une question de goût. Les navettes/avions que j'ai pu voir avec les ailes pleines en juxtaposant des panels de ce type
Blague à part tu as raison, mais j'explique la raison dans ma revue. De là à dire que c'est choquant, je comprends ton point de vue mais c'est une question de goût. Les navettes/avions que j'ai pu voir avec les ailes pleines en juxtaposant des panels de ce type  en différentes tailles ne m'ont pas convaincu. Les jointures sont forcément très approximatives et je trouve, peu élégantes.
en différentes tailles ne m'ont pas convaincu. Les jointures sont forcément très approximatives et je trouve, peu élégantes.
