

Mon but est de réaliser un bras de manipulation articulé de type robot industriel basé sur la brique intelligente EV3. Afin d'orienter un peu la conception, j'avais en tête un bras capable de saisir et manipuler des M&Ms (Je ne sais pas pourquoi mais j'ai tendance à associer les Mindstorms aux M&Ms, peut être à cause des billes fournies avec le NXT à l'époque...). Cela dit, je souhaite réaliser un robot capable de réaliser des tâches variées, que ce soit des séquences de mouvement pré-programmées (comme on en voit dans l'industrie) ou des mouvements plus ''libres'', tels que la recherche et récupération d'objets en vrac dans une zone.
Les objectifs :
- Réaliser un robot comportant une base rotative, un bras en deux partie et un outil de préhension.
- Assurer une précision correcte au modèle en limitant au maximum les sources d'erreur et de jeu.
- Garder une rigidité correcte du robot, toujours pour assurer une bonne précision.
- Conserver une vitesse de mouvement suffisante pour qu'on n'ait pas envie de s'endormir en le regardant travailler.
- Assurer au bras un volume d'accessibilité (zone pouvant être atteinte) maximale sans compromettre les objectifs précédents
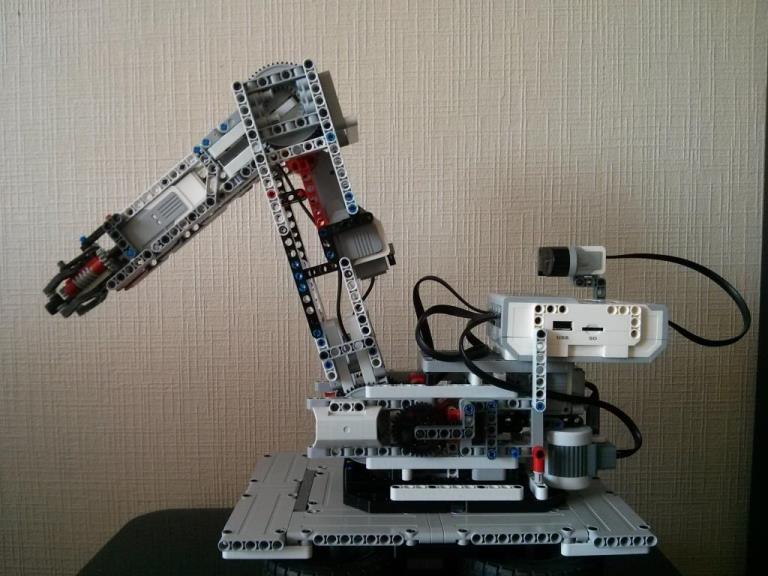
Le modèle actuel est en version Alpha. Il sert à tester les solutions techniques et les dimensions du modèle. La compacité est loin d'être optimisée et le schéma de couleur est chaotique car je me suis concentré sur la rigidité de l'ensemble.
Voici donc le modèle tel qu'il existe aujourd'hui :
Pour la conception, j'ai commencé par la pince. Elle devait être capable de saisir avec une certaine force des petits objets tout en étant suffisamment petite pour atteindre des zones étriquées. Après avoir passé une bonne soirée à m'arracher les cheveux à essayer de réaliser une pince symétrique correspondant à mes besoins, j'ai commencé à chercher l'inspiration sur internet. J'ai fini par tomber sur une idée de Leo Dorst qui s'est révélé parfaite pour mon projet :
J'ai ensuite continué la conception en partant de cette pince pour finalement arriver à la base :




Le robot comporte quatre moteurs : un servo medium pour la pince et trois gros servo pour le coude, l'épaule et la tourelle.
J'ai décidé d'utiliser des turntables pour les articulations du bras pour plusieurs raisons : Elles offres une certaines rigidité (surtout par deux), elles permettent une bonne démultiplication avec la couronne extérieur, et elles réduisent le jeu du fait de leur taille.
La brique EV3, fixée à l'arrière sur la tourelle, sert de contrepoids tout en permettant une rotation illimitée du robot, tous les moteurs se trouvant dans la tourelle.
En revanche à ce stade, le robot présente un défaut gênant : le point de rotation de la tourelle se trouvant quasiment à l'aplomb de la base du bras, le robot oscille d'avant en arrière lorsque le bras bouge. Je compte régler ce problème en élargissant la base de la tourelle et en répartissant la surface d'appuis tout autour de l'axe de rotation de l'ensemble.
Fonctionnement :
Pour le moment le robot n'est pas autonome. j'ai uniquement réalisé un programme simple pour tester la résistance de l'ensemble lors du mouvement, et la fluidité de ceux-ci. Le tout est contrôlé par le module infrarouge de l'EV3, grâce à la télécommande/Beacon. Les boutons de droite servent à sélectionner un des quatre moteurs, et ceux de gauche servent à contrôler le moteur dans un sens ou l'autre.
A terme, j'espère pouvoir piloter le robot via des coordonnées en X,Y et Z. Cela nécessitera un peu de maths et de trigonométrie, ainsi que de mesurer les dimensions en tenons du robot et les distances entre les articulations, mais une fois les équations en place, il sera facile de lui faire exécuter différentes tâches en lui indiquant uniquement les coordonnées des zones d'action.
J’envisage aussi de pouvoir lui monter un capteur en bout de bras pour qu'il puisse détecter des objets, mais je dois trouver un moyen pour fixer le capteur afin qu'il soit utilisable sans gêner la pince.
Un autre projet serait de rendre le montage en bout de bras modulaire, afin de pouvoir adapter différents outils.
La problématique étant toujours d'assurer une rigidité optimale afin d'assurer une excellente répétabilité au robot.
J'ai mis le projet en pause quelques jours car je suis en pleine réorganisation /tri / rangement de mon stock de pièces, mais je posterai mes progrès et les évolutions du robot au fur et à mesure.
Enfin bien sûr si vous avez des suggestions pour améliorer mon robot, je serai ravi de les entendre. :-)



.gif ";)")





.gif "8)")