Exercice 1 : Faire une pince à gobelet (Idée d'Alban reformulée par semtou)
- Objectif : Faire une pince en Légo capable de prendre un gobelet en plastique et de le soulever à plus d'un centimètre du sol avec un minimum de moteur.
- Contraintes : Pas de limite sur le nombre de modèles présentés, pas de limite dans le temps, aucune limite dans la quantité de pièces. Évidemment utilisation des composants Technic et briques intelligentes Mindstorms NXT voire RCX, SPYBOT, SCOUT, MICROSCOUT, MANAS etc... Ici même l'heureux possesseur d'un moteur et d'un boitier de pile peut participer.
- Programmation : Pas de contraintes sur le langage utilisé.
A nous de jouer
Edit le 08/02/2014 : ce topic avait été lancé dans le cadre d'un Exercice NXT. Suite à la suppression de cette rubrique, le sujet a été déplacé dans "De la théorie à la pratique".
T'as pas précisé qu'il fallait que ça soit motorisé : donc, si on fait tout par manivelle, on utilise un minimum de moteurs, non ( économie d'énergie, développement durable, toussa...)
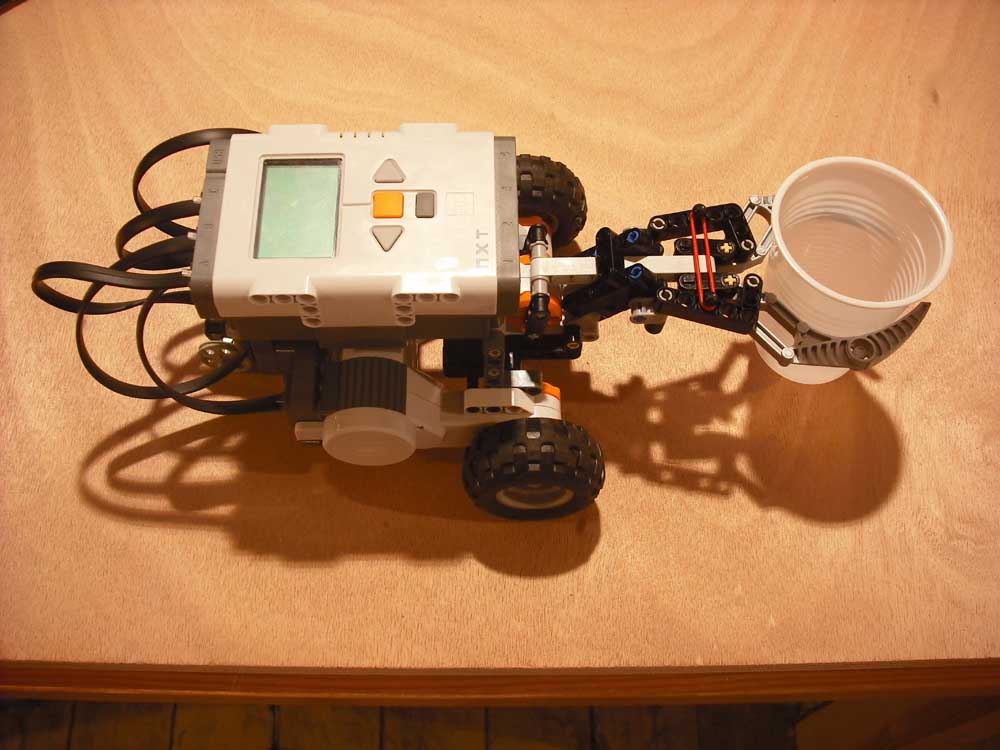
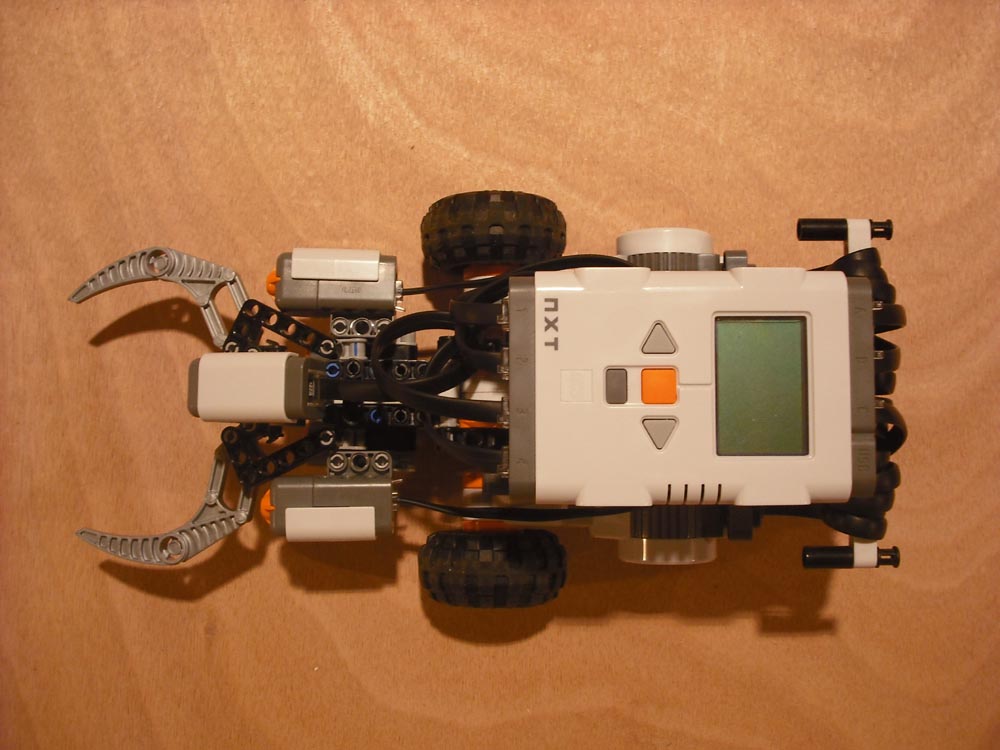
Développement durable, sans moteur : Elle est bonne celle là... Pas de souci j'ai des piles écolos... Aller je me lance : Je suis parti sur une pince en studless avec le moteur des NXT. 2 mouvements avec un moteur serrer + lever ou baisser + desserrer. Je me suis aussi dis que de lever un gobelet à plat ça serais mieux pour le contenu (en cas....). Voici ma première pince à gobelet : et le robot qui va avec : le modèle long et le court pour plus une ROVER plus compact que j'ai appelé RoverPinch 1 : Le même avec la pince plus courte : Et une vidéo du RoverPinch 1 en fonctionnement :
Dommage que j'arrive quant il y a déjà une solution.... je vais pas pouvoir m'empecher de m'en inspirer... je tente de réaliser ça se soir en temps limité Tres joli bras ceci dit
tu dis qu'il faut "utilisation des pièces technics et d'une brique intéligente", aprés tu dis "même les possesseurs d'un boîtier de pile et d'un moteur peuvent participer".
Moi j'ai un boitier et un moteur mais pas de brique, j'ai le droit de participer? (je ne ferais que la pince quoi, il n'y aura pas de programmation).
Pas de problème nico71 tu peux faire cet exercice avec ton moteur et ton boitier de pile. C'est vrai pour l'ambiguïté : en fait le but c'est de ne pas s'en tenir aux programmeurs ou aux possesseur de brique du type nxt rcx etc... Les autres exercices seront peut-être plus restrictif mais là c'est pas moi qui décide. Je pense qu'on peu même avoir les deux approches pour plus d'interactions et d'échanges. Il me tarde de voir les propositions des autres membres. Il y a forcément d'autres propositions possibles. Pour ma part je continu les recherches pour amélioré mon modèle mais je suis je pense en train de le surcharger et je pense qu'un des défauts du NXT c'est ses cables rigides. Voici RoverPinch 3 2 capteurs de contact en plus et rien ne va plus. Destiné à l'utilisation de la pince comme d'un pare-choc. j'ai donc 4 capteurs sur une pince qui monte et descend du 2 cm et la rigidité des cables provoquent pas mal de problème d'amplitude (diminution). C'est vraiment un problème ses cables (moi qui aime le compact). A Bientôt
Anio a écrit:Vivi, si l'exercice est réalisable sans NXT, pourquoi pas Nico.
possédant la brique nxt, j'ai commencé (par manque de temps) avec juste un moteur pfs. ainsi je peux toujours continuer ma progra sur les mini challenges
J'ai voulu vous présenter un ensemble le plus complet possible; ne voyez ici que la conception de la pince. Le programme est en NXT-G, facile à écrire. Je laisse le soin aux amateurs de le mettre en forme.
Dernière édition par roboleo le Jeu Avr 14, 2011 3:31 pm, édité 1 fois au total.
A+ Roboleo " Je ne cherche pas, je trouve…" P. Picasso
Intéressant tout ça : La pince de Semtou est très bien concue : Elle comporte des butées mécaniques qui permettent d'utiliser le moteur sans se préoccuper de sa position. C'est trés bien car quand on prend un objet cela peut bloquer le moteur qui n'atteint jamais une position précise. De plus l'idée d'utiliser les pinces pour détecter un mur est bonne. Je me suis aussi heurté au problème des câbles trop rigides. La pince, le robot de Léo est particulièrement compact (c'est mon grand défaut) et stable. Notez que le moteur de Léo pousse la pince alors que celui de semtou tire la pince.
Je suis heureux de voir arrivé ta création roboléo qui comme d'habitude m'impressionne par l'aspect compact. J'aime aussi beaucoup les 3 moteurs en ligne pour faire une sorte de châssis. La pince est trés économique en pièce pas de doute. J'ai l'impression que tu as mis de l'affichage pendant le déplacement... NON ? C'est le capteur US (ultra son) qui localise le verre (c'est pour cela que tu l'as décalé de l'axe) ? En tous cas bravo. voila un qui en jette au bar .










.gif ";)")


















.gif ":)")









 qui en jette au bar
qui en jette au bar  .
.